Важные шаги для построения физической модели
Обзор рабочего процесса
В таблице перечислены основные основные шаги построения и моделирования физической модели, а также связанные темы документации, содержащие справочную информацию по каждому шагу. Ниже приведены подробные описания шагов.
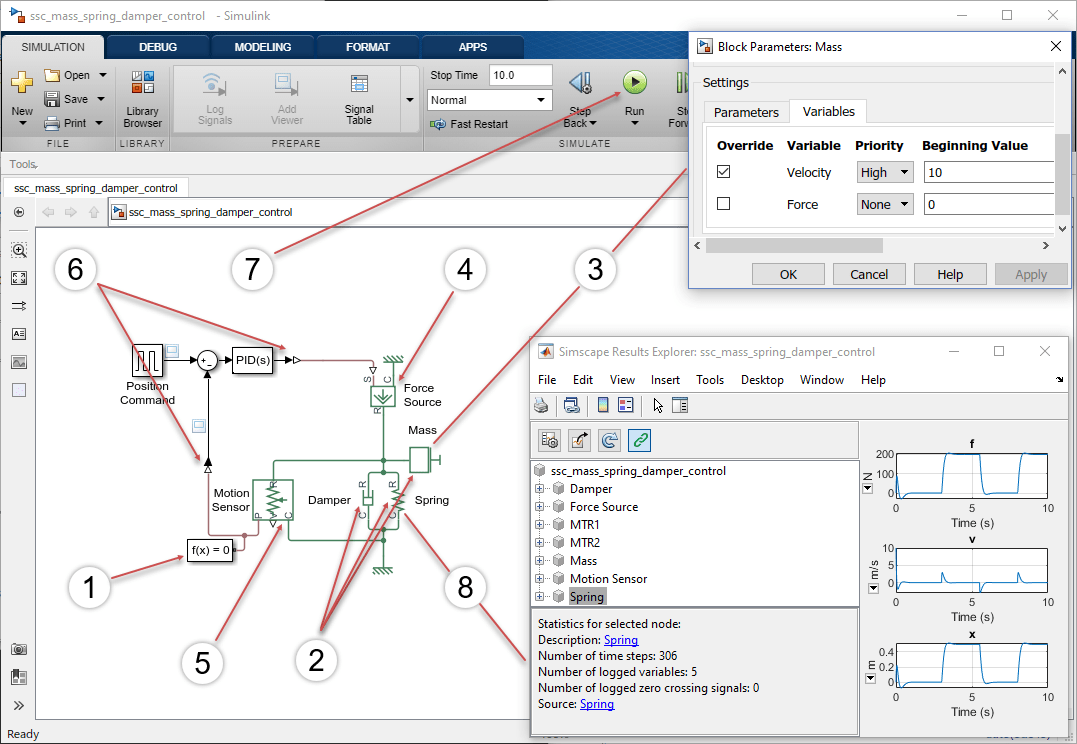
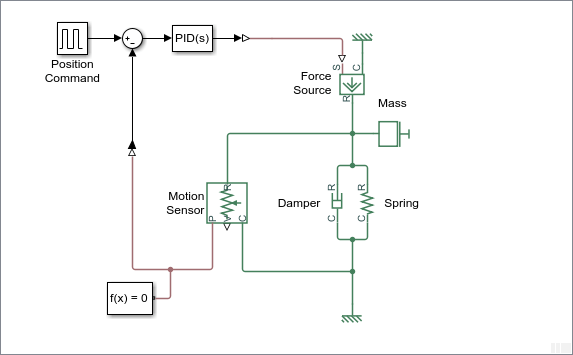
На рисунке показаны ключевые шаги рабочего процесса, примененные к модели примера Mass-Spring-Damper с контроллером. Ниже приведены подробные инструкции по созданию этой модели.
Шаг 1: Создание новой модели с помощью ssc_new
Используя ssc_new это лучший способ начать строить Simscape™ модели. Это помогает обеспечить использование рекомендуемых настроек по умолчанию для модели. При использовании ssc_new, автоматически:
Создание новой модели Simscape с обязательными и часто используемыми блоками на холсте модели
Выбор рекомендуемых параметров решателя и допуска
Включение протоколирования данных для всей модели
 Подробные инструкции
Подробные инструкции
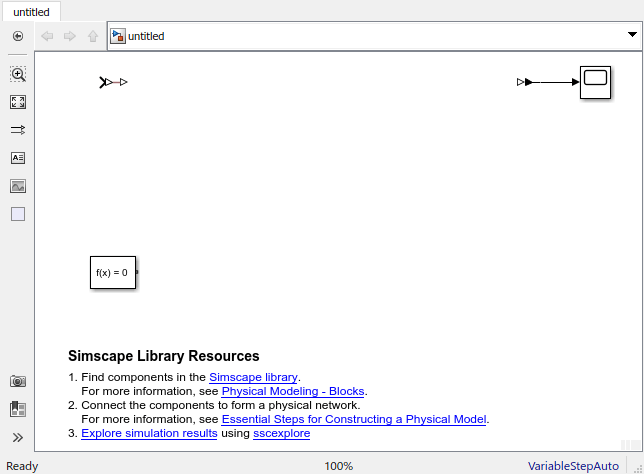
В окне команд MATLAB ® введите :
Новая модель без названия со значением решателя по умолчанию VariableStepAutoсодержит блок конфигурации решателя, блок преобразователя Simulink-PS и блок преобразователя PS-Simulink, подключенный к блоку Scope.
Раздел ресурсов в нижней части окна модели содержит ссылки на соответствующие библиотеки блоков и разделы документации.
Шаг 2: Сборка физической сети
Для моделирования системы необходимо добавить в модель блоки из библиотек Simscape, а затем подключить их к физической сети. Линии, соединяющие блоки в создаваемой схеме, представляют физические соединения, существующие между компонентами в реальной моделируемой системе. Другими словами, схемы Simscape имитируют компоновку физической системы.
При построении сети важно включать связанные с доменом опорные блоки, такие как «Electrical Reference», «Mechanical Translational Reference» и т. д. В зависимости от области эти блоки представляют соединение с землей, полкой или атмосферой. Дополнительные сведения см. в разделе Правила заземления.
Подробные инструкции
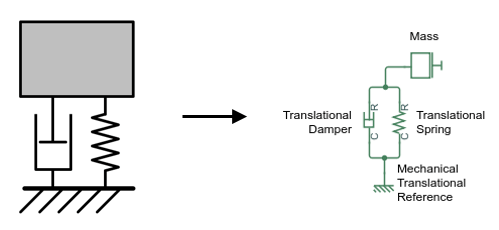
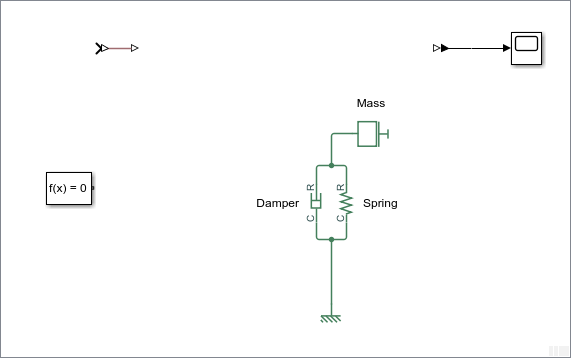
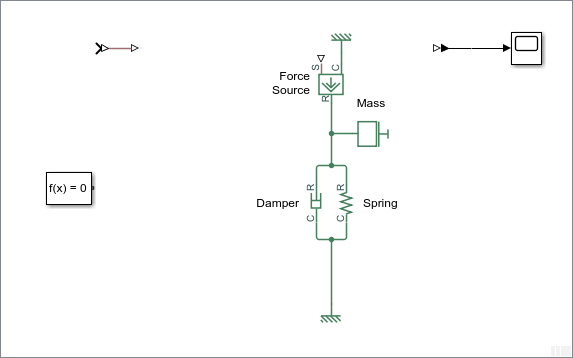
Откройте библиотеку Simscape > Foundation Library > Mechanical > Translational Elements.
Перетащите блоки «Масса», «Поступательная пружина», «Поступательный демпфер» и «Механическая поступательная привязка» в окно модели.
Соедините блоки поступательной пружины, поступательного демпфера и массы с блоком механической поступательной привязки, как показано на следующей иллюстрации. Чтобы повернуть блок, выделите его и нажмите клавиши Ctrl + R.
Чтобы настроить визуальное представление модели, сократите имена блоков «Пружина» и «Демпфер», как показано на рисунке. Чтобы имя блока формообразующего элемента отображалось вместе с «Пружиной» и «Демпфером», щелкните правой кнопкой мыши блок формообразующего элемента и в контекстном меню выберите «Формат» > «Показать» > «Вкл».
Шаг 3: Настройка параметров блока и переменных целей
Блоки Simscape представляют общие компоненты с начальными значениями по умолчанию для параметров и переменных блоков. Эти значения можно настроить в соответствии с приложением или в соответствии со спецификациями изготовителя.
Подробные инструкции
В этой модели можно настроить параметры, управляющие массой, жесткостью пружины и коэффициентом демпфирования. Также можно задать начальную скорость массы, настроив соответствующую переменную цель.
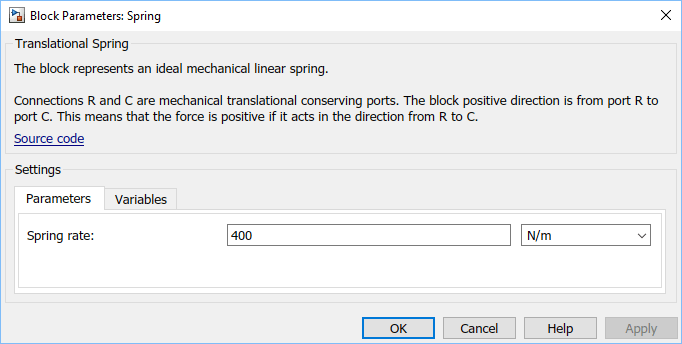
Дважды щелкните на блоке «Пружина». Установите для параметра «Скорость пружины» значение 400 N/m.
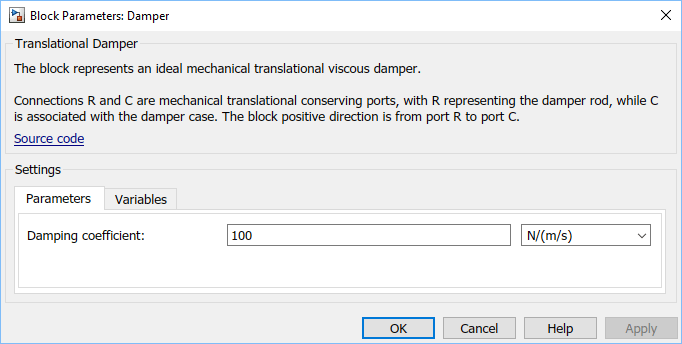
Дважды щелкните на блоке «Демпфер». Установить его коэффициент демпфирования равным 100 N/(m/s).
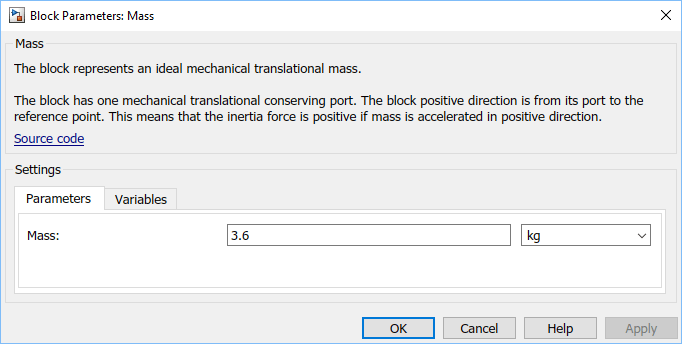
Дважды щелкните на блоке «Формообразующий элемент». Задать для его массы значение 3.6 kg.
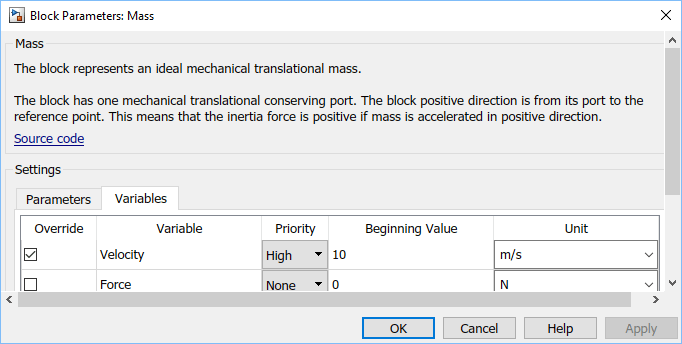
Чтобы задать требуемое начальное значение для массовой скорости, перейдите на вкладку Переменные (Variables). Переменная Velocity уже имеет приоритет, указанный как High. В поле Начальное значение введите 10и нажмите кнопку «Применить».
Обратите внимание, что флажок Переопределить (Override) рядом с переменной Velocity теперь установлен, что означает переопределение значения инициализации переменной по умолчанию. Эта переменная имеет высокий приоритет, поэтому решатель будет пытаться точно удовлетворить это начальное значение при вычислении начальных условий для определения начальной точки моделирования.
Шаг 4: Добавление источников
Управлять моделями Simscape можно с помощью входных сигналов. Этот метод позволяет представить физические эффекты, такие как силы, напряжения или давления, которые действуют на систему. Можно также указать другие величины, протекающие через систему, такие как ток, массовый расход и тепловой поток. Входные сигнальные соединения добавляются в физическую сеть с помощью исходных блоков Simscape.
Подробные инструкции
Чтобы добавить представление силы, действующей на массу, используйте блок «Источник идеальной силы».
Откройте библиотеку Simscape > Foundation Library > Mechanical > Mechanical Sources.
Добавьте в схему блок Источник идеальной силы (Ideal Force Source). Сократите имя блока, как показано на рисунке.
Чтобы отразить правильное направление силы, показанное на исходной схеме, переверните ориентацию блока. Если выбран блок «Источник силы», на вкладке «Формат» панели инструментов Simulink ® в разделе «Упорядочить» нажмите «Развернуть вверх-вниз ».
Скопируйте блок Mechanical Translational Reference, щелкнув его правой кнопкой мыши и перетащив в новое место. Затем измените ориентацию нового блока, используя тот же метод, что и для блока «Источник силы».
Подключите порт C блока источника силы ко второму блоку механической поступательной привязки и порт R к блоку массы, как показано ниже.
Входной сигнал для профиля силы будет подаваться через порт S после подключения физической сети к источнику Simulink (см. Шаг 6: Подключение к Simulink с интерфейсными блоками). Положительный сигнал в порту S определяет силу, действующую от порта C к порту R.
Шаг 5: Добавление датчиков
Можно измерять количества из физической сети и использовать их в других расположениях модели. Некоторые распространенные применения этих величин включают обратную связь для алгоритма управления, моделирование физических компонентов, поведение которых зависит от других физических величин (таких как температурно-зависимый резистор), или просто просмотр результатов во время моделирования.
Измерять величины можно с помощью блоков датчиков, соединенных последовательно или параллельно в зависимости от измеренного значения. Чтобы измерить величину, определяемую переменной Through (например, ток, расход, сила), подключите датчик последовательно. Чтобы измерить величину, определяемую переменной поперек (например, напряжение, давление, скорость), подключите датчик параллельно. Дополнительные сведения о переменных Через и Поперек см. в разделе Типы переменных.
Подробные инструкции
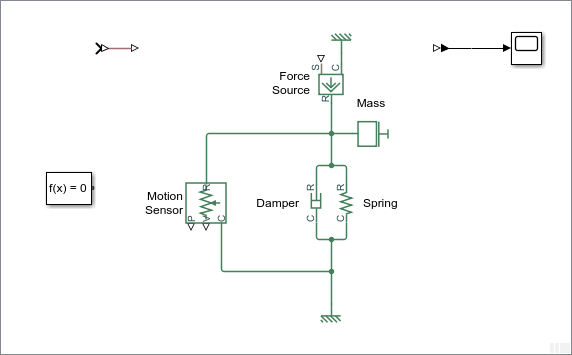
Чтобы измерить деформацию пружины, подключите блок датчика идеального поступательного движения параллельно пружине.
Откройте библиотеку Simscape > Foundation Library > Mechanical > Mechanical Sensors.
Добавьте в схему блок «Датчик идеального поступательного движения».
Чтобы повернуть блок, выделите его и нажмите клавиши Ctrl + R.
Подключите блок, как показано на следующей иллюстрации. Сократите имя блока, как показано на рисунке.
Шаг 6: Подключение к Simulink с интерфейсными блоками
Уравнения в сети Simscape решаются одновременно, а блоки Simulink оцениваются последовательно. Интерфейсные блоки, такие как Simulink-PS Converter и PS-Simulink Converter, обрабатывают границу между этими двумя соглашениями моделирования. Блоки интерфейса необходимы, когда сигналы Simulink задают величины в сети Simscape или при передаче величин Simscape в Simulink для проектирования управления или других целей. Каждый раз при подключении блока Simulink к физической сети Simscape необходимо использовать соответствующий блок преобразователя.
Подробные инструкции
Теперь вы собираетесь подключить вашу физическую сеть к контроллеру, созданному из обычных блоков Simulink. Сначала подготовьте физическую сеть к подключению к сигналам Simulink:
Удалите блок «Scope».
Хотя области можно использовать для просмотра результатов моделирования, они добавляют к блок-схеме загромождение. Более эффективным способом просмотра и анализа результатов моделирования является использование Simscape Results Explorer, как описано в разделе Шаг 8: Просмотр результатов моделирования.
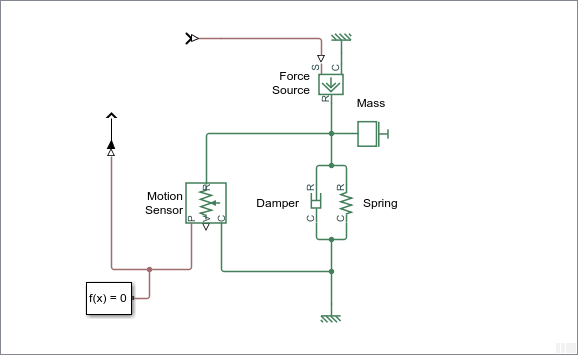
Подключите порт вывода физического сигнала блока преобразователя Simulink-PS к порту S блока источника силы.
Подключите выходной порт P блока датчика движения к входному порту физического сигнала блока PS-Simulink Converter.
Подключите блок конфигурации решателя к цепи и скройте имена блоков преобразователей. Теперь схема выглядит следующим образом.
Затем создайте и подключите контроллер:
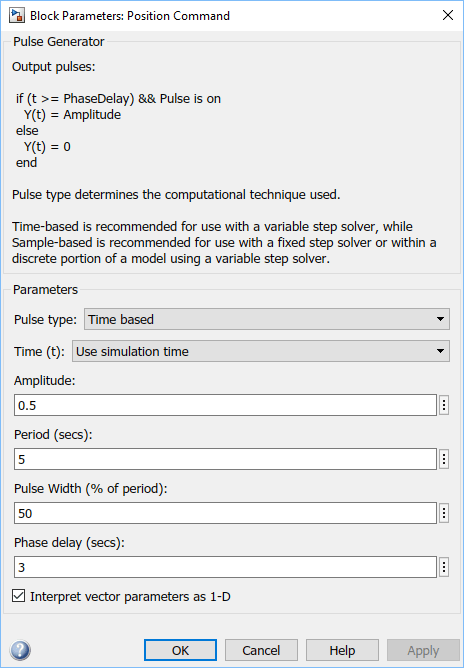
Откройте библиотеку Simulink > Sources и перетащите блок генератора импульсов в модель. Измените имя блока на «Position Command». Задайте параметры блока, как показано на рисунке.
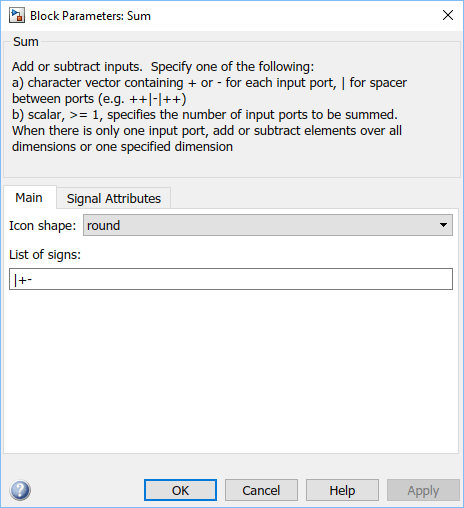
Откройте библиотеку Simulink > Math Operations и перетащите блок Sum в модель. В Списке знаков замените второй знак «плюс» на знак «минус», как показано на рисунке.
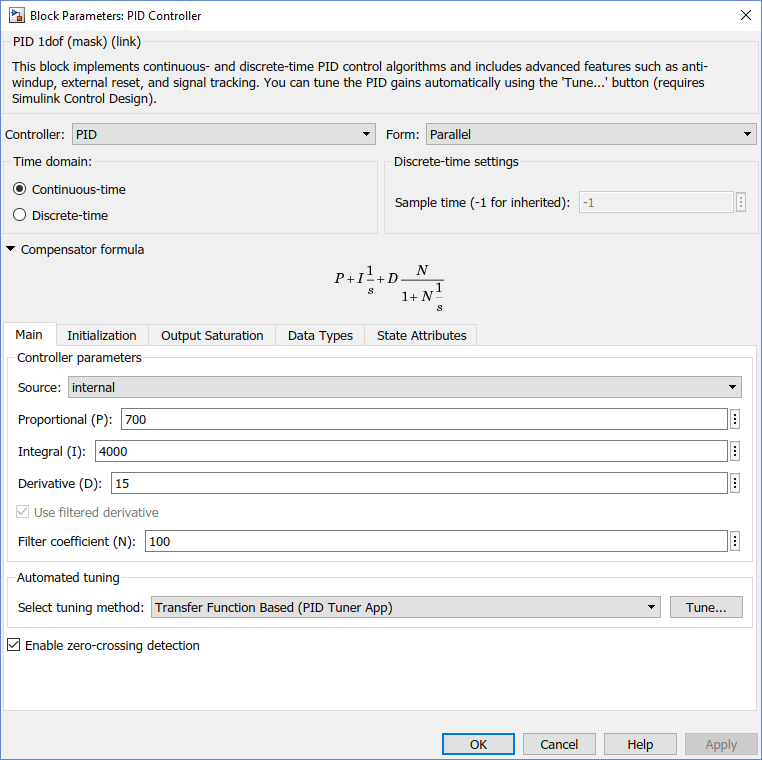
Откройте библиотеку Simulink > Continuous и перетащите блок PID Controller в модель. Задайте значения параметров Пропорциональная (P), Интегральная (I) и Производная (D), как показано на рисунке.
Подключите блоки, как показано на следующей схеме.
Управляющий сигнал Simulink поступает на входной порт блока Simulink-PS Converter, где преобразуется в физический сигнал, управляющий профилем силы блока Ideal Force Source.
Выходной порт P блока датчика идеального поступательного движения, измеряющего деформацию пружины, подключается к блоку преобразователя PS-Simulink. Этот блок преобразует физический сигнал в сигнал Simulink обратной связи для контроллера.
Для сравнения входных сигналов и сигналов обратной связи подключите их к средству просмотра сигналов:
Щелкните правой кнопкой мыши сигнал Simulink, который переходит из блока генератора импульсов в блок суммы. В контекстном меню выберите «Создать » > «Simulink» > «Scope».
Затем щелкните правой кнопкой мыши сигнал Simulink, который переходит из блока PS-Simulink Converter в блок Sum. В контекстном меню выберите «Подключиться » > «Область».
Шаг 7: Моделирование модели
Чтобы запустить моделирование, нажмите кнопку Выполнить (Run) на панели инструментов Simulink Toolstrip (вверху окна модели) или на панели инструментов Scope Viewer. Решатель Simscape оценивает модель, вычисляет начальные условия и выполняет моделирование. Подробное описание этого процесса см. в разделе Как работает Simscape Simulation. Сообщение в левом нижнем углу окна модели предоставляет обновление статуса.
(Run) на панели инструментов Simulink Toolstrip (вверху окна модели) или на панели инструментов Scope Viewer. Решатель Simscape оценивает модель, вычисляет начальные условия и выполняет моделирование. Подробное описание этого процесса см. в разделе Как работает Simscape Simulation. Сообщение в левом нижнем углу окна модели предоставляет обновление статуса.
Подробные инструкции
Чтобы запустить моделирование, щелкните на панели инструментов Simulink.
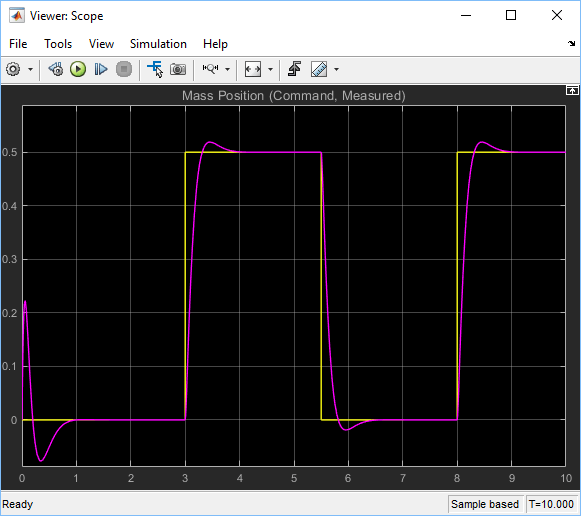
Средство просмотра области отображает наложенные графики входных сигналов и сигналов обратной связи.
Шаг 8: Просмотр результатов моделирования
Обозреватель результатов Simscape позволяет просматривать и анализировать данные моделирования с помощью функции регистрации данных. Например, можно сравнить два прогона моделирования для анализа влияния изменения массы на деформацию пружины.
Подробные инструкции
Щелкните правой кнопкой мыши на блоке «Пружина».
В контекстном меню выберите «Simscape» > «View » > «simlog».
Примечание
simlog является именем по умолчанию переменной журнала. Если изменить имя переменной с помощью параметра конфигурации Модель имени переменной рабочей области (Workspace variable name model), в контекстном меню это имя будет указано как переменная журнала, связанная с блоком.
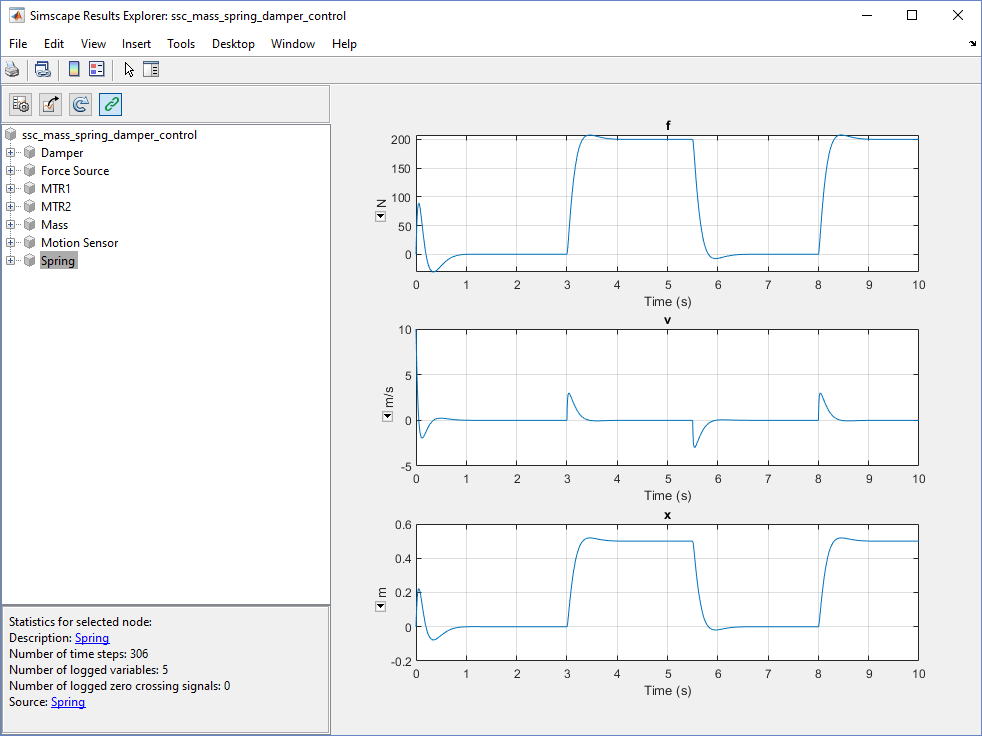
Откроется окно Simscape Results Explorer, на левой панели которого будет выделен узел, соответствующий блоку «Пружина». На правой панели отображаются графики данных моделирования для трех переменных, связанных с блоком.
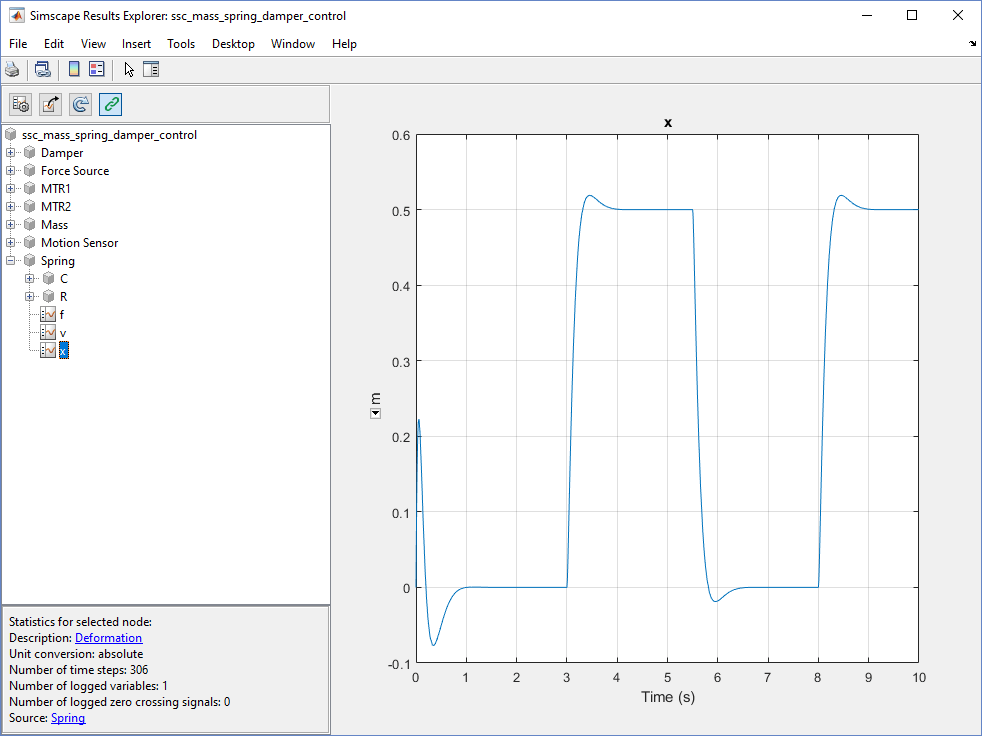
Разверните окно Spring узел и выберите узел x. На правой панели отображаются данные деформации пружины, выводимые на печать с течением времени.
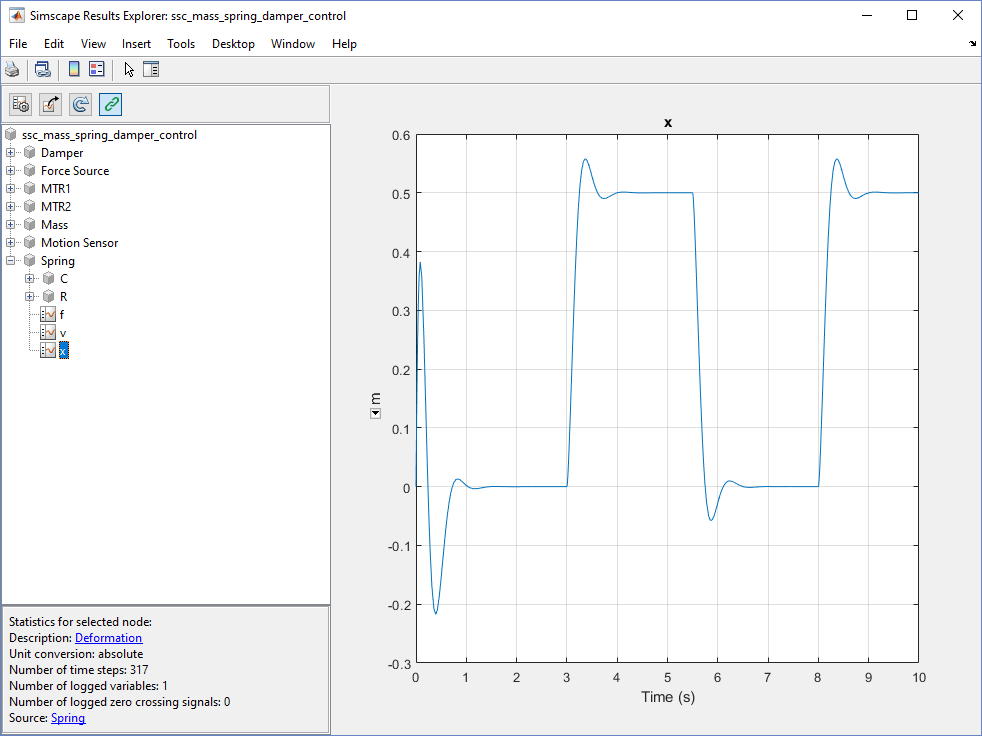
Дважды щелкните на блоке «Формообразующий элемент». Задать для его массы значение 7.2 kg.
Повторно запустите моделирование.
Чтобы перезагрузить записанные данные, нажмите кнопку, расположенную на панели инструментов окна Simscape Results Explorer. Во всплывающем окне, отображающем имя переменной, нажмите кнопку ОК.
кнопку, расположенную на панели инструментов окна Simscape Results Explorer. Во всплывающем окне, отображающем имя переменной, нажмите кнопку ОК.
Примечания
Для автоматической перезагрузки данных после каждого запуска моделирования в диалоговом окне «Параметры конфигурации» на панели Simscape установите флажок «Открыть средство просмотра после моделирования».
Для просмотра результатов моделирования бок о бок в двух отдельных окнах Simscape Results Explorer используйте кнопку после первого запуска моделирования. Дополнительные сведения см. в разделе Сведения о обозревателе результатов Simscape.
кнопку после первого запуска моделирования. Дополнительные сведения см. в разделе Сведения о обозревателе результатов Simscape.