Датчик, измеряющий относительную пространственную взаимосвязь между двумя кадрами
Simscape/Multibody/Кадры и преобразования

Блок датчика преобразования измеряет относительную пространственную взаимосвязь между двумя произвольными кадрами в модели Simscape™ Multibody™. Измерения разрешаются в кадре измерения блока и включают относительные перемещения, повороты и их первые и вторые производные времени.
Блок имеет два порта кадров: B и F. Чтобы измерить относительное соотношение между двумя кадрами, сначала подключите порты кадров к кадрам, которые требуется измерить; затем установить параметр Measurement Frame в требуемый кадр для разрешения измерений; Последний раз выберите требуемые выходные параметры для выражения измерений.
Совет
Чтобы измерить абсолютные величины поступательного или вращательного движения кадра, подключите порты F и B кадра блока к этому кадру и мировому кадру модели соответственно.
Параметр Measurement Frame влияет на все выходы блока, кроме перечисленных в таблице.
| Продукция | Порты |
|---|---|
| Измерения вращения | q, axs, Q и R |
| Производные кватерниона | Q и Qdd |
| Производные матрицы вращения | Rd и Rdd |
| Расстояние и его производные | dst, vdst и adst |
Блок Transform Sensor имеет пять различных вариантов выбора параметра Measurement Frame: World, Base, Follower, Non-Rotating Base, и Non-Rotating Follower. При установке для параметра «Рамка измерения» значения World, все измерения разрешаются в мировой рамке. При установке для параметра «Рамка измерения» значения Base или Followerизмерения разрешенного ускорения включают в себя центростремительный и кориолисовый члены, если соответствующее основание или ведомый кадр вращается. Если для параметра «Рамка измерения» задано значение Non-Rotating Base или Non-Rotating Follower, измерения не удовлетворяют стандартной производной зависимости, если вращается соответствующее основание или рамка толкателя. Например, относительная линейная скорость не равна производной по времени относительного перемещения. Дополнительные сведения см. в разделе Выбор рамки измерения.
Блок имеет три параметризации для выражения измеренных вращений: угловая ось, кватернион и матрица вращения. Выберите параметры Угол (Angle) и Ось (Axis), чтобы использовать параметризацию угол-ось. Выберите параметры Кватернион (Quaternion) или Трансформировать (Transform) в разделе Поворот (Rotation), чтобы использовать параметризации матрицы кватерниона или поворота. Аналогично блок имеет три параметризации для выражения скоростей вращения и ускорений: координаты X-, Y- и Z-; производные времени кватерниона; и матрица. Чтобы включить эти параметризации, можно выбрать соответствующие параметры в разделе Угловая скорость (Angular Velocity) и Угловое ускорение (Angular Acceleration). Дополнительные сведения см. в разделе Вращательные измерения.
Блок имеет три системы координат для выражения поступательных измерений: декартова, цилиндрическая и сферическая. Можно выбрать один или несколько из них одновременно. Дополнительные сведения см. в разделе Трансляционные измерения.
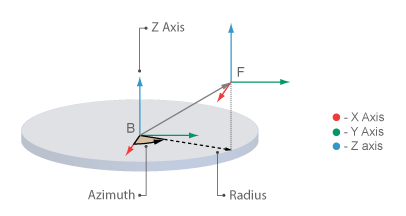
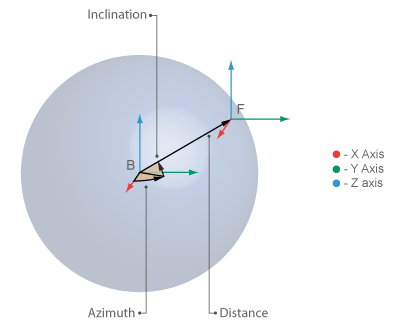
Таблицы суммируют координаты цилиндрической и сферической систем, а изображения показывают диаграммы систем. Для простоты в изображениях параметр «Кадр измерения» имеет значение Base для разрешения измерений.
Цилиндрические координаты
| Координата | Описание |
|---|---|
| Радиус | Длина проекции вектора BF, в плоскости X-Y кадра измерения. |
| Азимут | Угол Radius относительно положительной оси X в плоскости X-Y. Угол разрешается в кадре измерения и попадает в диапазон [-δ, δ). |
| Z | Стандартная декартова координата Z вектора BF разрешен в кадре измерения. |
Сферические координаты
| Координата | Описание |
|---|---|
| Расстояние | Расстояние между исходными точками базового и ведомого кадров. |
| Азимут | Угол проекции вектора BF в плоскости X-Y относительно положительной оси X. Угол разрешается в кадре измерения и попадает в диапазон [-δ, δ). |
| Склонность | Угол вектора BF относительно плоскости X-Y кадра измерения. Угол попадает в диапазон [-λ/2, λ/2]. |
Чтобы использовать определенную систему координат, выберите соответствующие параметры. Например, если требуется использовать декартову систему для выражения измеренной относительной линейной скорости кадра толкателя, выберите параметры X, Y и Z в разделе Скорость (Velocity). Обратите внимание, что на поступательные измерения влияют как настройка параметров «Кадр измерения», так и выбор систем координат.
Выходные порты остаются скрытыми до тех пор, пока не будут выбраны соответствующие параметры. Каждый порт выдает изменяющийся во времени физический сигнал. Блок PS-Simulink Converter можно использовать для установки единиц измерения выходных сигналов при подключении блока Transform Sensor к блокам Simulink ®.

