Блок Transform Sensor можно использовать для измерения относительной взаимосвязи между двумя произвольными кадрами, которые подключены к портам B и F кадров блока. Отношение включает относительное вращение, перемещение и их первые и вторые производные времени. Эти измерения являются 3-D векторами или величинами более высоких размеров, такими как матрицы вращения.
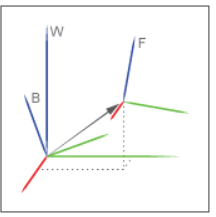
Для вычисления с помощью измеренных векторов эти векторы должны быть разрешены в координатах. Установка параметра Measurement Frame определяет, где следует разрешить измеренные векторы; векторы разрешаются в координатах выбранного кадра. Например, на рисунке, поскольку для параметра «Кадр измерения» было установлено значение Worldблок Transform Sensor распознает вектор преобразования, показанный черной стрелкой, в координатах мирового кадра.
Примечание
Измерение поворота блока датчика преобразования не зависит от параметра «Кадр измерения».
Можно задать для параметра «Рамка измерения» значение World, Base, Follower, Non-Rotating Base, и Non-Rotating Follower.
WorldБлок датчика преобразования определяет измеренные векторы в координатах мирового кадра.
Мировой кадр - это инерционный кадр.
Base или FollowerБлок датчика преобразования определяет измеренные векторы в координатах выбранного кадра, который является базовым кадром или кадром-толкателем.
Основной или ведомый кадр - это кадр, который соединяется с B или F портом блока соответственно. Базовая и ведомая рамы неинерциальны. Следовательно, векторы, разделенные в основной или ведомой рамке, могут включать в себя центростремительные и кориолисовые термины.
Non-Rotating Base или Non-Rotating BaseБлок «Датчик преобразования» отображает векторы, разрешенные в мировой рамке, на выбранную рамку, которая является невращающейся базовой или невращающейся. Другими словами, блок вычисляет матрицу поворота от мирового кадра к текущему базовому кадру или кадру-следящему кадру, затем умножает матрицу на векторы, разрешенные в мировом кадре.
Невращающаяся базовая или невращающаяся ведомая рама является мгновенной рамой, которая совпадает и выровнена с соответствующей базовой или ведомой рамой в текущий момент времени. Измерения, разрешенные в невращающихся кадрах, не включают центростремительные и кориолисовые термины.
В таблице сравниваются свойства измерений для различных настроек рамки измерений.
| Рамка измерения | Стандартное производное отношение |
|---|---|
| В мире | Да |
| Основа | Да |
| Последователь | Да |
| Невращающееся основание | Нет |
| Невращающийся толкатель | Нет |
Когда выбранный кадр удовлетворяет стандартной производной зависимости, измерения, разрешенные в этом кадре, связаны друг с другом. Например, при выборе Worldразрешенный вектор линейного ускорения является производной по времени разрешенного вектора линейной скорости, которая является производной по времени разрешенного вектора линейного перемещения.
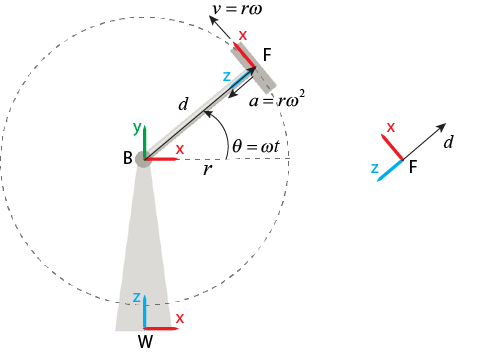
В этом примере показаны измерения блока Transform Sensor с различными настройками параметра Measurement Frame. Изображение иллюстрирует единую систему степеней свободы с четырьмя частями: опорой, ступицей, тягой и автомобилем. Опора закреплена на земле, а шток соединяет ступицу и вагон. Базовая, следящая и мировая рамы системы расположены в центре ступицы, автомобиля и днища опоры соответственно.
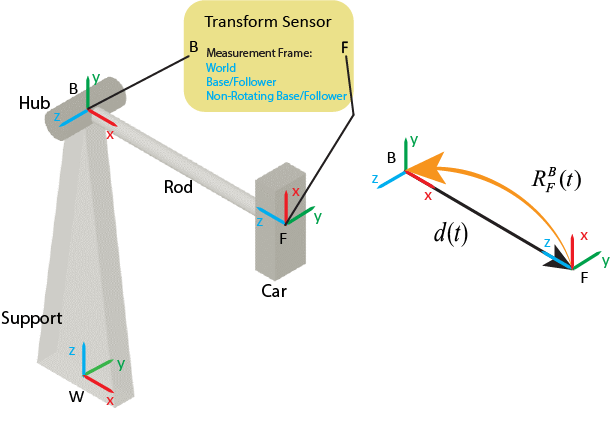
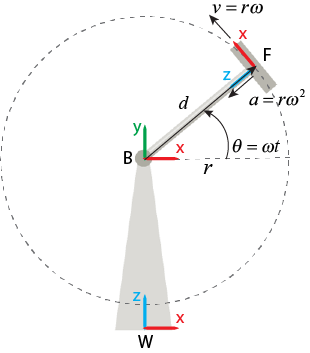
Стержень имеет длину и вращается с постоянной угловой скоростью, , вокруг Z- ось базового каркаса. Блок Transform Sensor используется для измерения относительных перемещений между автомобилем и ступицей. Например, блок измеряет относительное перемещение, ) и вращение, t) между автомобилем и ступицей.
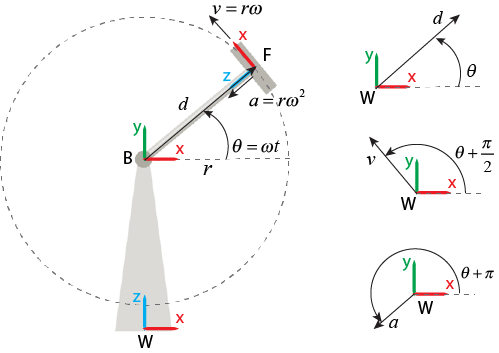
На рисунке показан вид спереди системы. Для простоты в этом примере показано только разрешение линейных измерений, таких как перемещение, скорость и ускорение, в декартовых координатах.
WorldПри установке для параметра «Рамка измерения» значения Worldблок измеряет движение кадра толкателя относительно базового кадра, затем разрешает относительное движение в мировом кадре.
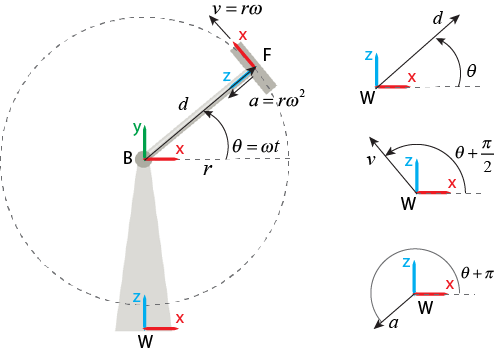
Векторы перемещения, скорости и ускорения имеют постоянные величины, поскольку длина стержня постоянна. Тем не менее, они вращаются с постоянной скоростью вокруг Y- ось мирового кадра. Следовательно, векторы перемещения, скорости и ускорения могут быть выражены как:
costü t0sinobjectt]
sint0cosobjectt]
sinü t]
Следует отметить, что векторы, разрешенные в мировой рамке, всегда удовлетворяют стандартной производной зависимости. Например, равно временной производной .
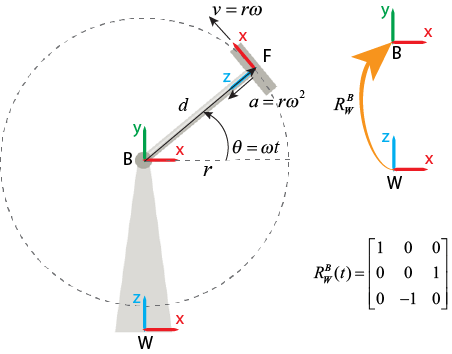
Base или FollowerПри установке для параметра «Рамка измерения» значения Baseблок измеряет относительное движение ведомого кадра относительно базового кадра и разрешает измерения в координатах базового кадра.
Поскольку в этом примере базовый кадр является фиксированным, измерения могут быть выражены как:
cosstarttsinü t0]
sintobjectcosü t0]
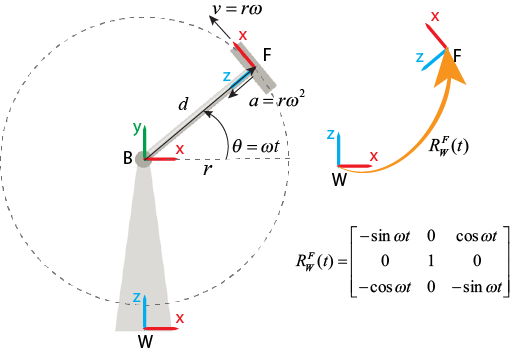
При установке для параметра «Рамка измерения» значения Followerблок измеряет относительное движение ведомого кадра относительно базового кадра, затем разрешает измерения в координатах ведомого кадра. Разрешенные векторы включают в себя центростремительный и кориолисовый термины, потому что кадр-толкатель вращается с течением времени. К наблюдателю, прикрепленному к ведомой раме, начало координат базовой рамы никогда не перемещается. Поэтому линейная скорость и линейное ускорение равны нулю.
00 − 1]
000]
000]
Следует отметить, что векторы, разрешенные в кадрах базы и толкателя, всегда удовлетворяют стандартной производной зависимости. Например, равняется временной производной .
Non-Rotating Base или Non-Rotating FollowerПри установке для параметра «Кадр измерения» значения Non-Rotating Baseблок отображает векторы, разрешенные в мировом кадре, в мгновенный кадр, который совпадает и выровнен с базовым кадром в текущий момент.
cosü tsinü t0]
sintà tcost0]
При установке для параметра «Рамка измерения» значения Non-Rotating Followerблок отображает векторы, разрешенные в мировом кадре, в мгновенный кадр, который совпадает и выровнен с последовательным кадром в текущий момент.
r [00 − 1]
rλ [100]
rü 2 [001]
Следует отметить, что если базовая или ведомая рама не зафиксирована, измерения в соответствующей невращающейся раме не удовлетворяют стандартной производной зависимости. Например, из-за поворота рамы толкателя, если для параметра «Рамка измерения» задано значение Non-Rotating Followerвектор разрешенной скорости не является производной по времени от вектора разрешенной трансляции.
