Можно измерять перемещение кадра в различных системах координат. К ним относятся декартовы, цилиндрические и сферические системы. Различные системы координат доступны через блок «Датчик преобразования» (Transform Sensor) и, в ограниченной степени, через блоки «Соединение» (Joint). Выбор системы координат зависит от модели. Выберите наиболее удобную для приложения систему координат.
Перевод - это относительная величина. Преобразование одного кадра является значимым только по отношению к другому кадру. Таким образом, блоки с возможностью измерения перемещения требуют двух кадров для выполнения измерения: измеренных и опорных кадров. В этих блоках порт кадра толкателя идентифицирует измеренный кадр; порт базового кадра идентифицирует опорный кадр измерения.
Некоторые измерения являются общими для нескольких систем координат. Одним из примеров является координата Z, которая существует как в декартовой, так и в цилиндрической системах. В диалоговом окне «Преобразовать датчик» координаты, составляющие несколько систем координат, отображаются только один раз. Выбор Z выводит перемещение вдоль оси Z в декартовой и цилиндрической системах координат.
Другие измерения отличаются, но имеют одно и то же имя. Например, радиус является координатой в сферической и цилиндрической системах. Сферический радиус отличается от цилиндрического: первый - расстояние между двумя истоками каркаса; последнее представляет собой расстояние между началом координат одного кадра и осью Z кадра.
Чтобы дифференцироваться между двумя радиальными координатами, Simscape™ Multibody™ использует следующую конвенцию:
Радиус - цилиндрическая радиальная координата
Расстояние - сферическая радиальная координата
Декартова система координат использует три линейных координаты - X, Y и Z - соответствующие трем взаимно ортогональным осям. Измерения декартового преобразования имеют единицы измерения расстояния, по умолчанию используется метр. Блок PS-Simulink Converter можно использовать для выбора другой физической единицы при взаимодействии с блоками Simulink ®.
![]()
Можно выбрать любую из декартовых осей в сенсоре преобразования для измерения перемещения. Это верно, даже если перемещение ограничено по любой декартовой оси. Выбор декартовых осей открывает физические сигнальные порты x, y и z соответственно.
С помощью соединительных блоков можно почувствовать перемещение вдоль каждой призматической примитивной оси. Выбор параметра считывания из призматического примитивного меню открывает соответствующий порт физического сигнала. Например, если выбрать Положение (Position) в поле Z Prismatic Primitive (Pz) блока декартового соединения, то блок откроет физический сигнальный порт z.
Цилиндрическая система координат использует одну угловую и две линейные координаты. Линейные координаты - радиус цилиндра, R, и длина, Z. Угловая координата - азимут, Линейные координаты имеют единицы измерения расстояния, по умолчанию используется метр. Угловая координата имеет единицы измерения угла, по умолчанию используется радиан. Блок PS-Simulink Converter можно использовать для выбора другой физической единицы при взаимодействии с блоками Simulink.
![]()
Только блок Transform Sensor может воспринимать перемещение кадра в цилиндрических координатах. В диалоговом окне этого блока можно выбрать одну или несколько цилиндрических координат для измерения. Цилиндрические координаты называются Z, Радиус (Radius) и Азимут (Azimuth). Выбор цилиндрических координат открывает физические сигнальные порты z, rad и azm соответственно.
Примечание
Z относится как к декартовой, так и к цилиндрической системам.
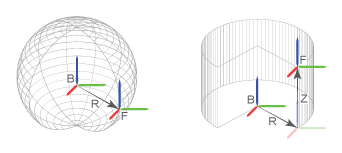
Сферическая система координат использует две угловые координаты и одну линейную. Линейная координата - это сферический радиус, R. Угловые координаты - это азимут, Линейная координата имеет единицы измерения расстояния, по умолчанию - метр. Угловые координаты имеют единицы угла, по умолчанию используется радиан. Блок PS-Simulink Converter можно использовать для выбора другой физической единицы при взаимодействии с блоками Simulink.
![]()
Только блок Transform Sensor может воспринимать перемещение кадра в сферических координатах. В диалоговом окне этого блока можно выбрать одну или несколько сферических координат для измерения. Сферические координаты называются Азимут (Azimuth), Расстояние (Distance) и Наклон (Inclination). Выбор сферических координат открывает физические сигнальные порты azm, dst и inc соответственно.
Примечание
Азимут относится как к цилиндрической, так и к сферической системам. Расстояние - это сферический радиус.
