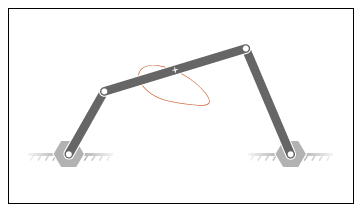
В этом учебном пособии мы создадим простой сценарий MATLAB ® для моделирования четырехполосной модели с различной длиной ответвителя. Сценарий использует координаты движения ответвителя, полученные с помощью блока Transform Sensor, для построения графика результирующей кривой ответвителя при каждом значении длины ответвителя. Сведения о создании четырехлинейной модели, используемой в данном учебном пособии, см. в разделе Моделирование кинематической цепи с замкнутым контуром .
В командной строке MATLAB введите smdoc_four_bar. Открывается четырехлинейная модель. Инструкции по созданию этой модели см. в разделе Модель кинематической цепи с замкнутым контуром.
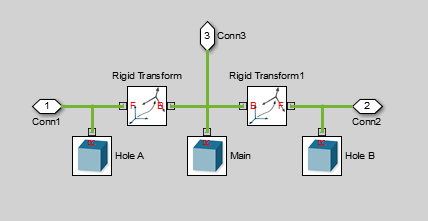
Под маской блока Binary Link B подключите третий блок Outport, как показано на рисунке. Блок «Исходящий» можно добавить путем копирования и вставки Conn1 или Conn2. Новый блок определяет кадр, траектория которого выводится на печать в данном учебном пособии.
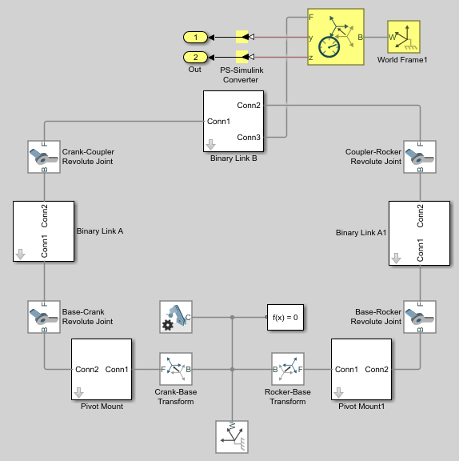
Добавьте в модель следующие блоки. Во время моделирования блок датчика преобразования вычисляет и выводит траекторию ответвителя относительно мирового кадра.
| Библиотека | Блок | Количество |
|---|---|---|
| Кадры и преобразования | Мировая рамка | 1 |
| Кадры и преобразования | Трансформировать сенсор | 1 |
| Simscape™ Коммунальные услуги | Преобразователь PS-Simulink | 2 |
| Раковины Simulink ® | Вспомогательный порт | 2 |
В диалоговом окне «Преобразование блока датчика» выберите следующие переменные:
Перевод > Y
Перевод > Z
Блок открывает порты кадра y и z, через которые он выводит координаты траектории ответвителя.
Подключите блоки, как показано на рисунке. Убедитесь, что блок Transform Sensor перевернут так, чтобы его базовый порт рамы с меткой B соединялся с блоком World Frame.
В блоке «Конфигурация механизма» измените значение параметра «Равномерная сила тяжести» на None.
В блоке «Поворотное соединение основания и кривошипа» укажите следующие цели состояния скорости. Цели являются адекватным источником движения для целей данного учебного пособия.
Выберите «Цели состояния» > «Указать скорость».
В меню «Цели состояния» > «Указать скорость» > «Значение» введите 2 рев ./с.
Снимите флажок «Цель состояния» > «Указать положение».
Укажите следующие длины связей. Длина линии связи ответвителя параметризуется в терминах переменной MATLAB, LCoupler, позволяя изменять его значение итеративно с помощью простого сценария MATLAB.
| Блок | Параметр | Стоимость |
|---|---|---|
| Двоичный канал B | Длина | LCoupler |
| Двоичная ссылка A1 | Длина | 25 |
Сохраните модель в удобной папке, присвоив ей имя smdoc_four_bar_msensing.
Создайте сценарий MATLAB для итеративного выполнения моделирования при различных длинах линий связи ответвителя:
На панели инструментов MATLAB нажмите кнопку «Создать сценарий».
В сценарии введите следующий код:
% Run simulation nine times, each time
% increasing coupler length by 1 cm.
% The original coupler length is 20 cm.
for i = (0:8);
LCoupler = 20+i;
% Simulate model at the current coupler link length (LCoupler),
% saving the Outport block data into variables y and z.
[~, ~, y, z] = sim('smdoc_four_bar_msensing');
% Plot the [y, z] coordinates of each coupler curve
% on the x = i plane. i corresponds to the simulation run number.
x = zeros(size(y)) + i;
plot3(x, y, z, 'Color', [1 0.8-0.1*i 0.8-0.1*i]);
view(30, 60); hold on;
endСохраните сценарий как sim_four_bar в папке, содержащей четырехполосную модель.
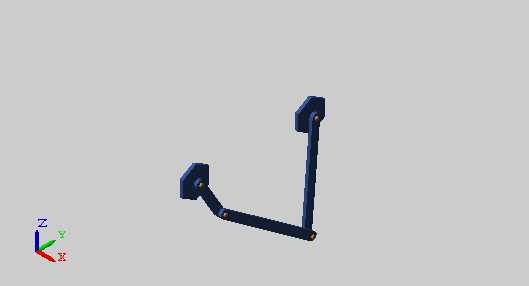
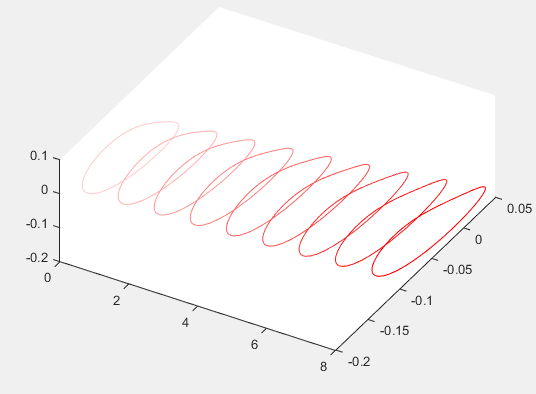
Запустите сценарий sim_four_bar. На панели инструментов редактора MATLAB нажмите кнопку «Выполнить» или, при активном редакторе, нажмите клавишу F5. Откроется Mechanics Explorer с динамическим видом 3-D четырехлинейной модели.
Simscape Multibody™ итеративно выполняет каждое моделирование, добавляя результирующую кривую связи ответвителя к активному графику. На рисунке показан окончательный график.
Простой подход, показанный в этом учебном пособии, можно использовать для анализа динамики модели при различных значениях параметров. Например, можно создать сценарий MATLAB для моделирования модели кривошипно-ползункового механизма при различных длинах звеньев ответвителя, выводя на график для каждого прогона моделирования силу зависимости, действующую на поршень.
