Соединительные блоки обеспечивают два параметра срабатывания. Эти параметры «Сила/крутящий момент» и «Движение» определяют поведение соединения во время моделирования. В зависимости от выбранных параметров блок соединения может принимать параметр срабатывания в качестве входного или автоматически вычислять его значение во время моделирования.
Дополнительная настройка (None) позволяет установить силу/крутящий момент непосредственно на ноль. Примитив соединения может свободно перемещаться во время моделирования, но не имеет ввода исполнительного механизма. Движение опосредованно обусловлено силами и моментами, действующими в другом месте модели, или непосредственно к целям состояния скорости.
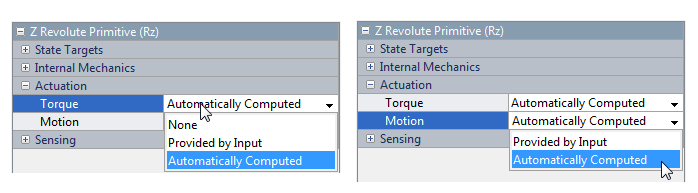
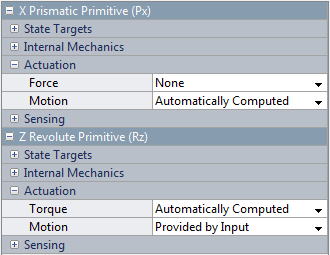
Как и все параметры блока соединения, параметры срабатывания выбираются отдельно для каждого примитива соединения. Разные примитивы соединения в одном блоке не должны иметь одинаковые настройки срабатывания. Например, с помощью блока соединения Пин-Паз (Pin Slot Joint) можно обеспечить ввод движения и автоматически вычислить крутящий момент для примитива вращения по оси Z (Rz), при этом движение будет автоматически вычисляться без силы приведения в действие для примитива X призматического (Px).
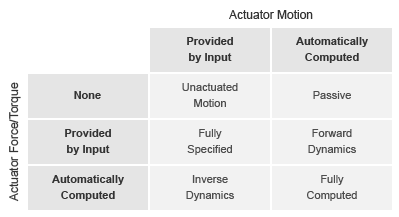
Комбинируя различные настройки силы/крутящего момента и движения, можно получить различные режимы совместного включения. Режимы прямой и обратной динамики являются двумя общими примерами. Вы активируете примитив соединения в режиме прямой динамики, предоставляя силу/крутящий момент в качестве входного сигнала при автоматическом вычислении движения. И наоборот, вы активируете примитив соединения в режиме обратной динамики, обеспечивая движение в качестве входного сигнала при автоматическом вычислении силы/крутящего момента.
Возможны и другие режимы совместного включения, включая полностью вычисленные и полностью заданные режимы. В таблице представлены различные режимы срабатывания, которые можно получить, манипулируя настройками параметров срабатывания.
Режимы включения соединения
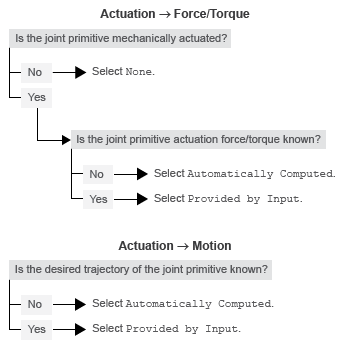
В более общем плане, более практичным подходом к моделированию является рассмотрение совместного приведения в действие с точки зрения определенных или расчетных величин, т.е. силы/крутящего момента и движения. Возможно, вы не всегда знаете подходящий режим для соединения, но, предварительно спланировав модель, вы всегда должны знать ответы на два вопроса:
Активируется ли примитив сустава механически?
Известна ли желаемая траектория совместного примитива?
Выбирая параметры срабатывания соединения на основе ответов на эти вопросы, вы можете убедиться, что каждое соединение правильно настроено для вашего приложения. На рисунке показаны правильные настройки в зависимости от ваших ответов.
Выбор параметров управления примитивом соединения
Входной сигнал движения примитива соединения - это объект временной последовательности, задающий траекторию этого примитива. Для призматического примитива эта траектория является координатой положения вдоль примитивной оси, заданной как функция времени. Координата обеспечивает положение начала координат рамы толкателя относительно начала координат базовой рамы. Первобытная ось разрешается в базовом кадре.
Для примитива вращения траектория - это угол вокруг примитивной оси, задаваемый как функция времени. Этот угол обеспечивает поворот рамы толкателя относительно базовой рамы вокруг примитивной оси. Ось будет разрешена в базовой рамке.
Примитивы сферических соединений не обеспечивают возможности приведения в действие. Можно задать крутящий момент для этих примитивов, но нельзя задать их траектории. Эти траектории всегда автоматически вычисляются на основе динамики модели во время моделирования.
В отличие от параметра «Приведение в действие» > «Сила/крутящий момент», параметр «Приведение в действие» > «Движение» не предоставляет опции нулевого ввода, соответствующей примитиву фиксированного соединения во время моделирования. Однако можно назначить нулевое движение так же, как и все другие типы движения: с помощью блоков Simscape™ и Simulink ®.
В Simscape Multibody™ входные сигналы движения являются позиционно-ориентированными. Задается положение примитива соединения, и при фильтрации до второго порядка блок преобразователя Simulink-PS сглаживает сигнал, автоматически предоставляя две производные времени. Такое поведение делает предписание нулевого движения простым: просто обеспечить постоянный сигнал на входной порт приведения в действие движения примитива соединения и имитировать.
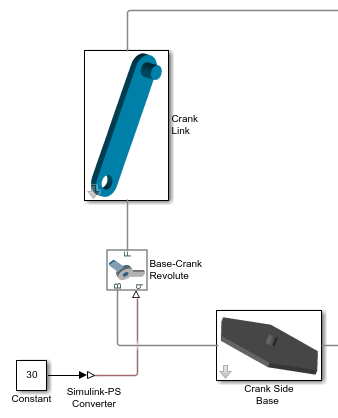
На рисунке показан пример назначения нулевого движения. Блок Simulink Constant обеспечивает постоянное значение положения. Блок преобразователя Simulink-PS преобразует этот сигнал Simulink в сигнал Simscape, совместимый с входным портом приведения в движение блока поворотного соединения Base-Crank. Предполагая, что сборка и моделирование успешны, это соединение будет поддерживать фиксированный угол в 30 градусов, соответствующий значению, заданному в блоке константы симулятора, и единицам, заданным в блоке преобразователя симулятора-PS.
При назначении общей примитивной траектории целесообразно задавать один вход, позицию и фильтр, которые вводятся с помощью блока Simulink-PS Converter. Этот фильтр, который должен быть второго порядка, автоматически предоставляет две временные производные входного движения. Так как он также сглаживает входной сигнал, фильтр может помочь предотвратить проблемы моделирования из-за внезапных изменений или разрывов, таких как присутствующие при использовании блока Simulink Step.
Фильтрация сглаживает входной сигнал по шкале времени порядка постоянной времени входной фильтрации. Чем больше постоянная времени, тем больше сглаживание сигнала и тем больше искажение сигнала. Чем меньше постоянная времени, тем ближе отфильтрованный сигнал к входному сигналу, но тем больше жесткость модели - и, следовательно, тем медленнее моделирование.
Как правило, входная постоянная времени фильтрации должна быть меньше наименьшей релевантной шкалы времени в модели. По умолчанию его значение равно 0,001. Хотя оно подходит для многих моделей, оно часто слишком мало для моделей Simscape Multibody. Для ускорения моделирования начните со значения 0,01 с. Уменьшите это значение для большей точности.
Если известны две производные времени входного сигнала движения, их можно указать непосредственно. Такой подход наиболее удобен для простых траекторий с простыми производными. Однако необходимо убедиться, что два производных сигнала совместимы с позиционным сигналом. В противном случае, даже если моделирование продолжается, результаты могут быть неточными.
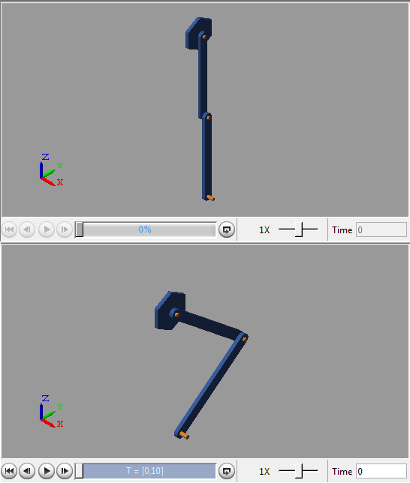
Многофюзеляжные соединения Simscape с входами движения начинают моделирование (Ctrl + T) в исходном положении, определяемом входным сигналом. Это исходное положение может отличаться от собранного состояния, которое управляется алгоритмом сборки, оптимизированным для достижения целей совместного состояния, если таковые имеются. Даже при отсутствии целей совместного состояния собранное состояние может отличаться от такового в момент моделирования 0.
Примечание
Состояние сборки получается при каждом обновлении блок-схемы, например, при нажатии клавиш Ctrl + D. Начальное состояние моделирования получается при каждом запуске моделирования, например, при нажатии клавиш Ctrl + T и паузе в нулевое время.
Из-за расхождений между двумя состояниями, Model Report предоставляет точные данные о начальном состоянии только для моделей, у которых отсутствуют входные данные движения. Для моделей, имеющих входы движения, эти данные являются точными только тогда, когда исходное положение, предписанное входным сигналом движения, точно соответствует начальному положению, предписанному в целях совместного состояния.
Аналогично, Mechanics Explorer точно отображает начальные состояния соединений только для моделей, у которых отсутствуют входные данные движения. При переходе из собранного состояния в исходное состояние моделирования Mechanics Explorer может показать внезапный скачок, если модель содержит входные данные движения, несовместимые с целями состояния соединения. Устранить внезапное изменение можно, сделав исходное положение, предписанное входами движения соединения, равным начальному положению, предписанному целями состояния соединения.
При фильтрации входного сигнала с помощью блока Simulink-PS Converter необходимо только предоставить сигнал позиции. Блок автоматически вычисляет производные. Однако необходимо выбрать фильтрацию второго порядка в диалоговом окне блока:
Откройте диалоговое окно блока «Конвертер Simulink-PS» и нажмите «Обработка ввода».
В разделе Фильтрация и производные выберите Filter input.
В порядке фильтрации ввода выберите Second-order filtering.
Во Входное постоянное время фильтрации (в секундах), войдите в характерное время, за которое фильтр сглаживает сигнал. Хорошее начальное значение: 0.01 секунд.
При прямом предоставлении входных производных необходимо сначала вычислить эти производные. Затем с помощью блока Simulink-PS Converter можно предоставить их целевому соединительному блоку. Для непосредственного указания входных производных:
Откройте блок Simulink-PS Converter, принимающий входной сигнал, и перейдите на вкладку Input Handling.
В разделе Фильтрация и производные выберите Provide input derivative(s).
Чтобы указать обе производные, в поле Входные производные выберите Provide first and second derivatives.
Блок отображает два дополнительных физических сигнальных порта, по одному для каждой производной.
