В этом учебном пособии с помощью блока «Поворотное соединение» задается изменяющийся во времени угол поворота кривошипа четырехлинейного звена. Затем, во время моделирования, вы измеряете крутящий момент в том же соединении, что и заданное движение.
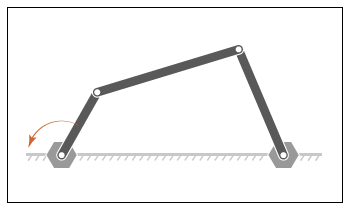
В командной строке MATLAB ® введитеsmdoc_four_bar. Откроется четырехлинейная модель. Эта модель создается в учебном пособии «Модель кинематической цепи с замкнутым контуром».
В диалоговом окне блока «Поворотное соединение основания и кривошипа» задайте следующие параметры.
| Параметр | Настройка |
|---|---|
| Включение > Крутящий момент | Automatically Computed |
| Приведение в действие > Движение | Provided by Input |
| Датчик > Крутящий момент привода | Отобранный |
Блок соединения отображает два физических сигнальных порта. Входной порт q принимает угловое положение соединения. Выходное отверстие t обеспечивает момент приведения в действие соединения, необходимый для достижения этого углового положения.
В каждом из четырех диалоговых окон блока «Поворотное соединение» установите значение «Внутренняя механика» > «Коэффициент демпфирования». 5e-4
N*m/(deg/s). При моделировании демпфирующие силы между шовными рамами учитывают диссипативные потери на стыках.
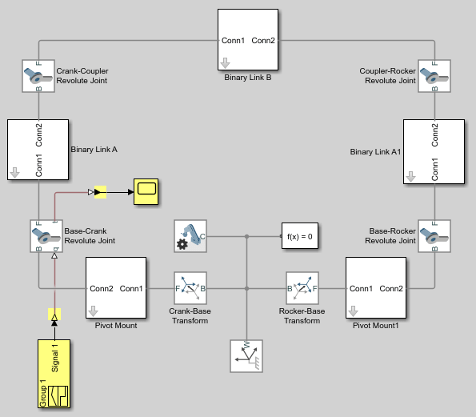
Перетащите следующие блоки в модель. Эти блоки позволяют задать сигнал крутящего момента и построить график положения соединения.
| Блок | Библиотека |
|---|---|
| Конвертер Simulink-PS | Simscape > Утилиты |
| Преобразователь PS-Simulink | Simscape > Утилиты |
| Объем | Simulink > Раковины |
| Построитель сигналов | Simulink > Источники |
Подключите блоки, как показано на рисунке.
На вкладке «Обработка ввода» диалогового окна «Блок преобразователя Simulink-PS» задайте следующие параметры блока.
| Параметр | Стоимость |
|---|---|
| Фильтрация и производные | Filter input |
| Порядок фильтрации входных данных | Second-order filtering |
В окне Построитель сигналов (Signal Builder) укажите угловую траекторию соединения, как показано на рисунке.
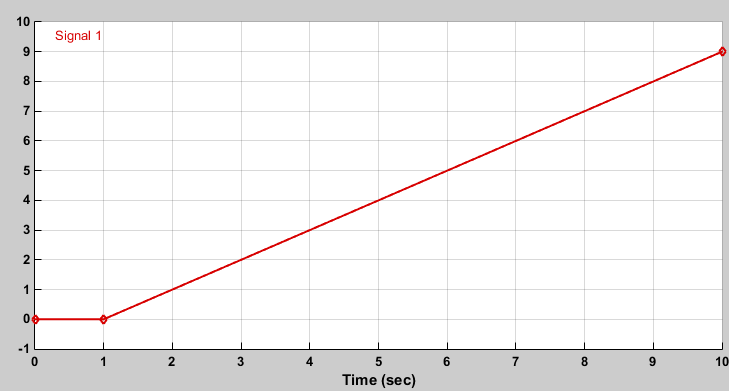
Этот сигнал соответствует постоянной угловой скорости 1 рад/с от t = 1 с.
Запустите моделирование. Откроется Mechanics Explorer с динамическим отображением четырехлинейной модели.
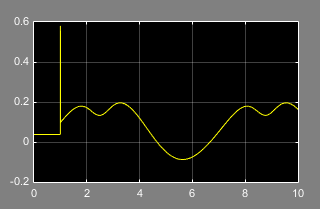
Откройте окно Scope. График объема показывает момент срабатывания соединения, с помощью которого можно достичь заданного движения.