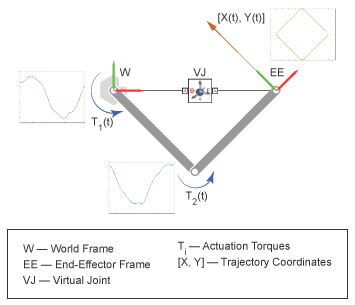
В этой обучающей программе Вы предписываете изменяющие время координаты траектории плоской структуры конца манипулятора относительно мировой структуры, используя Совместный блок с 6 финансовыми департаментами. Этот блок обеспечивает требуемые степени свободы между двумя кадрами, но не представляет реальную физическую связь между ними. Считается, что соединение, которое оно представляет, является виртуальным.
Изменяющиеся во времени координаты отслеживают квадратную картину, достигаемую автоматическим вычислением и применением крутящих моментов в различных соединениях манипулятора. Во время моделирования можно вывести автоматически вычисленные крутящие моменты и распечатать их с помощью блоков Simulink ® или команд MATLAB ®, например, для целей анализа.
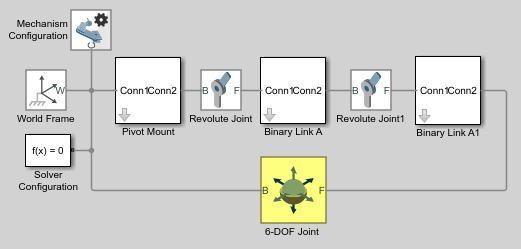
В командной строке MATLAB введите smdoc_double_pendulum. Откроется двойная модель маятника, которая в данном учебном пособии адаптируется как простая модель плоского манипулятора. Инструкции по созданию этой модели см. в разделе Моделирование кинематической цепи с разомкнутым контуром
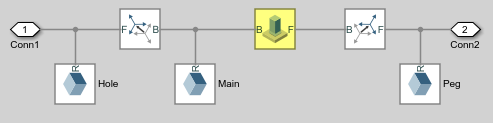
От Simscape> Мультитело> библиотека Суставов, тяните Совместный блок с 6 финансовыми департаментами и соедините его как показано в числе. Этот блок представляет собой виртуальное соединение, которое используется для задания конечного кадра манипулятора относительно мирового кадра.
Примечание
Проверьте, что базовая полка портов (B) подключена к мировой полке. Рамка базового порта функционирует как опорная рамка для всех вводимых данных о движении соединения. Переключение кадров основного и ведомого портов заставляет блок интерпретировать любое движение, введенное относительно другого кадра, возможно, изменяя траекторию конечного кадра манипулятора.
В диалоговом окне «6-DOF блок соединения» задайте эти параметры.
| Параметр | Выбрать |
|---|---|
| Y призматический примитив (Py) > Приведение в действие > Движение | Provided by Input |
| Z призматический примитив (Pz) > Включение > Движение | Provided by Input |
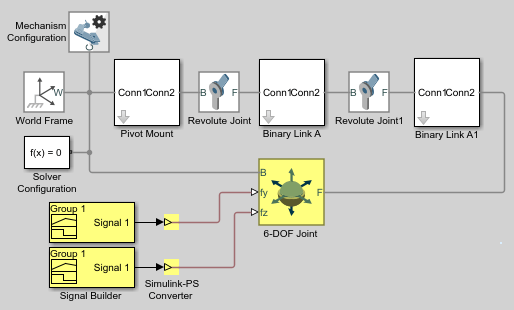
Блок открывает два физических сигнальных порта, через которые можно обеспечить входы движения соединения.
Перетащите эти блоки в модель.
| Библиотека | Блок | Количество |
|---|---|---|
| Simscape > Утилиты | Конвертер Simulink-PS | 2 |
| Simulink > Источники | Построитель сигналов | 2 |
Блоки построителя сигналов обеспечивают входные данные движения в виде сигналов Simulink. Блоки преобразователя Simulink-PS преобразуют сигналы Simulink в Simscape™ физические сигналы, совместимые с блоками Simscape Multibody™.
Подключите блоки, как показано на рисунке.
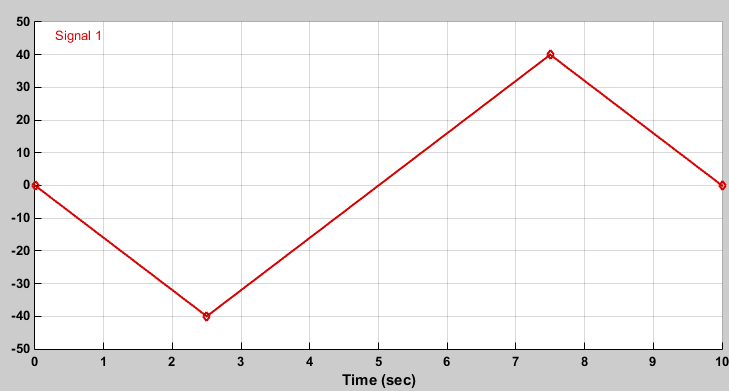
Откройте диалоговое окно блока Signal Builder, подключенного к порту py блока 6-DOF Joint. Укажите этот сигнал, изменяющуюся во времени координату Y квадратной траектории, которой должен следовать конечный кадр манипулятора.
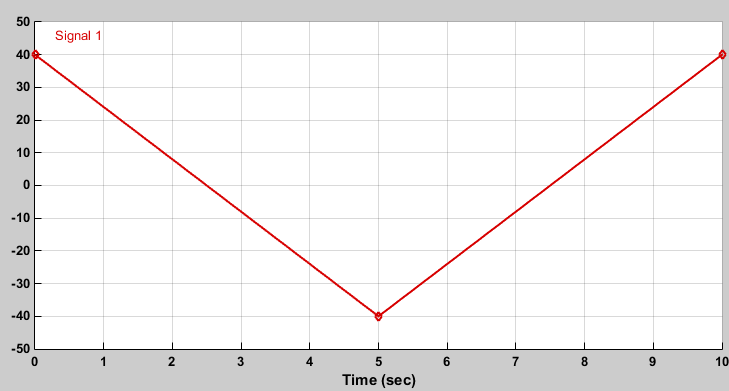
Откройте диалоговое окно блока Signal Builder, подключенного к порту pz блока 6-DOF Joint. Укажите этот сигнал, изменяющуюся во времени координату Z квадратной траектории, которой должен следовать конечный кадр манипулятора.
В диалоговых окнах блоков Simulink-PS Converter укажите единицы входного сигнала и настройки фильтрации. Simscape Multibody требует, чтобы вы либо указали фильтрацию второго порядка, либо предоставили первые две временные производные координат траектории.
| Параметр | Стоимость |
|---|---|
| Единицы > Блок входного сигнала | cm |
| Обработка ввода > Фильтрация и производные | Filter input |
| Обработка ввода > Порядок фильтрации ввода | Second-order filtering |
| Обработка ввода > Постоянная времени фильтрации ввода (в секундах) | 0.1 |
Небольшие константы фильтрации могут значительно замедлить моделирование. Для большинства моделей Simscape Multibody значение 0,1 секунды является хорошим выбором. В данном учебном пособии этого значения достаточно.
В диалоговых окнах двух блоков поворотного соединения задайте следующие параметры срабатывания и измерения.
| Параметр | Настройка |
|---|---|
| Включение > Крутящий момент | Automatically Computed |
| Измерение > Крутящий момент срабатывания | Отобранный |
Simscape Multiobody требует, чтобы число примитивных степеней свободы соединения с входами движения равнялось числу с автоматически вычисленными усилиями и моментами срабатывания соединения. Если модель не соответствует этому условию, моделирование завершается ошибкой.
Перетащите эти блоки в модель.
| Библиотека | Блок | Количество |
|---|---|---|
| Simscape > Утилиты | Преобразователь PS-Simulink | 2 |
| Simulink > Раковины | К рабочему пространству | 2 |
Блоки преобразователя PS-Simulink преобразуют физические выходные сигналы в сигналы Simulink, совместимые с другими блоками Simulink.
В двух диалоговых окнах «В блок рабочего пространства» введите имена переменных t1 и t2.
Подключите блоки, как показано на рисунке.

Попытка запуска моделирования. Моделирование завершается с ошибкой, возникающей из-за замкнутого кинематического контура, присутствующего в модели. Simscape Multiobody требует, чтобы этот контур содержал по крайней мере один блок соединения без входных сигналов движения или автоматически вычисленных сил или моментов срабатывания.
Из библиотеки Simscape > Multibody > Joints перетащите блок сварного соединения и соедините его внутри одной из подсистем Binary Link A.
Добавление блока Сварное соединение (Weld Joint) гарантирует, что система с замкнутым контуром содержит по меньшей мере один блок соединения без входных сигналов движения или вычисленных моментов срабатывания.
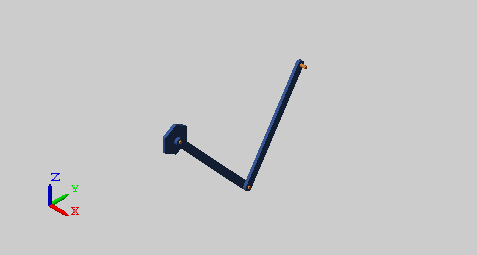
Запустите моделирование еще раз. Откроется Mechanics Explorer с динамическим 3-D отображением двухполосной связи.
Постройте график расчетных моментов срабатывания, действующих на два поворотных соединения в звене. В командной строке MATLAB введите следующий код:
figure;
hold on;
plot(t1.time, t1.data, 'color', [60 100 175]/255);
plot(t2.time, t2.data, 'color', [210 120 0]/255);
xlabel('Time');
ylabel('Torque (N*m)');
grid on;
