В Simscape™ Multibody™ соединение приводится в действие непосредственно с помощью блока соединения. В зависимости от применения входные сигналы приведения в действие соединения могут включать в себя переменные силы/крутящего момента или движения. В этом примере в четырехпалубной модели связи задается крутящий момент для поворотного соединения.
Блоки Transform Sensor добавляют в модель датчик движения. Можно построить график измеренных переменных и использовать графики для кинематического анализа. В этом примере мы построим график кривых ответвителя для трех типов четырехвалковых звеньев: кривошип-качалка, двуплечий кривошип и двуплечий шатун.
Четырехпалубное звено содержит четыре звена, которые соединяются с четырьмя поворотными соединениями, образуя плоский замкнутый контур. Эта связь преобразует движение входного звена в движение выходного звена. В зависимости от относительной длины четырех звеньев четырехпалубное звено может преобразовывать вращение во вращение, вращение в колебание или колебание в колебание.
Связи идут под разными именами в соответствии с их функциями в четырехполосной связи. Например, ответвительные звенья передают движение между кривошипными и коромысловыми звеньями. В таблице представлены различные типы связей, которые можно найти в четырехполосной связи.
| Связь | Движение |
|---|---|
| Заводная рукоятка | Вращается относительно наземного звена |
| Рокер | Колебания относительно наземного звена |
| Сцепной прибор | Передает движение между кривошипно-коромысловыми звеньями |
| Земля | Жестко соединяет четырехпалубную связь с мировой или другой подсистемой |
Ссылки обычно имеют сложные формы. Это особенно относится к наземному звену, которое может быть просто приспособлением, удерживающим две поворотные опоры, которые соединяются с коленчатыми или коромысловыми звеньями. В качестве жесткого пролета между двумя соседними вращающимися соединениями можно определить связи со сложными формами. В примере Модель кинематической цепи с замкнутым контуром жесткий пролет между двумя поворотными опорами представляет звено заземления.
Тип преобразования движения, обеспечиваемый четырехполосной связью, зависит от типов связей, которые она содержит. Например, четырехпалубное звено, которое содержит два кривошипно-шатунных звена, преобразует вращение на входном звене в вращение на выходном звене. Этот тип рычажного механизма известен как двуплечий кривошипно-шатунный механизм. Другие комбинации линий связи обеспечивают различные типы преобразования движения. В таблице описаны различные типы четырехлинейных связей, которые можно моделировать.
| Связь | Движение «вход-выход» |
|---|---|
| Кривошип-качалка | Непрерывное вращение-колебание (и наоборот) |
| Двойной кривошип | Непрерывное вращение - непрерывное вращение |
| Двойной качалка | Осцилляция-осцилляция |
Теорема Грашофа предоставляет основное условие, которому должна удовлетворять четырёхпланочная связь, чтобы хотя бы одно звено завершило полный оборот. Согласно этой теореме, четырёхпалубное звено содержит одно или несколько кривошипно-шатунных звеньев, если суммарная длина самого короткого и самого длинного звеньев не превышает совокупную длину двух оставшихся звеньев. Математически условие Грашофа:
| s + l ≤ p + q | (1) |
s - кратчайшая линия связи
l - самая длинная линия связи
p и q - две оставшиеся линии связи
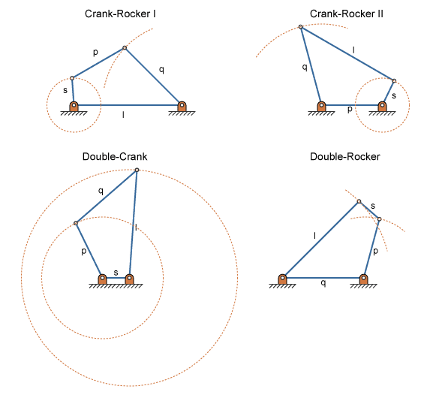
Связь Grashof может быть трех различных типов:
Кривошип-качалка
Двуплечий кривошип
Двойной качалка
Путем изменения линии связи с землей можно изменить тип линии связи Grashof. Например, назначив кривошипно-шатунное звено кривошипно-коромыслового звена в качестве наземного звена, можно получить двухкривошипное звено. На рисунке показаны четыре связи, полученные путем изменения линии связи с землей.
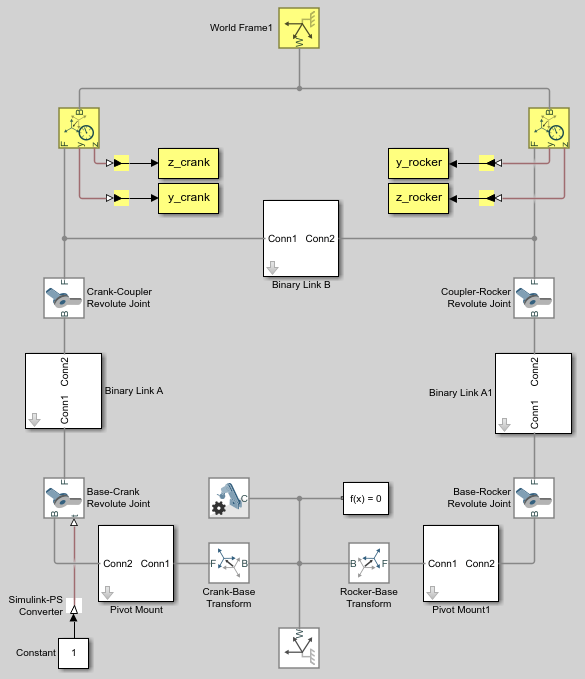
В этом примере выполняются две задачи. Сначала необходимо добавить в модель входной момент приведения в действие крутящего момента. Затем вы чувствуете движение кривошипа и коромысла относительно рамы Мира. Входной сигнал приведения в действие представляет собой крутящий момент, который прикладывается к соединению, соединяющему основание с кривошипно-шатунным звеном. Поскольку крутящий момент прикладывается к соединению, его можно добавить непосредственно через блок соединения. Блок, в который добавляется входной сигнал приведения в действие, называется «Поворотное соединение базового кривошипа» (Base-Crank Revolute Joint).
Входной сигнал включения добавляется к соединительному блоку через порт ввода физического сигнала. По умолчанию этот порт скрыт. Чтобы отобразить его, необходимо выбрать Provided by Input из выпадающего списка «Включение» > «Крутящий момент».
Затем можно задать значение крутящего момента с помощью блоков Simscape или Simulink ®. При использовании блоков Simulink необходимо использовать блок Simulink-PS Converter. Этот блок преобразует сигнал Simulink в физический сигнал, который может использоваться Simscape Multibody. Дополнительные сведения см. в разделе Включение и измерение с помощью физических сигналов.
Для определения движения кривошипа и коромысла используется блок «Трансформировать сенсор». С помощью этого блока можно воспринимать движение между любыми двумя кадрами в модели. В этом примере он используется для определения координат [Y Z] кривошипных и коромысловых звеньев относительно кадра World.
Выходные порты физического сигнала блоков датчика преобразования по умолчанию скрыты. Для их отображения необходимо выбрать соответствующие выходы движения. С помощью преобразователя PS-Simulink можно преобразовать физические выходные сигналы в сигналы Simulink. Затем можно подключить результирующие сигналы Simulink к другим блокам Simulink.
В этом примере координаты кривошипа и коромысла выводятся в рабочее пространство с помощью блоков Simulink To Workspace. Выходные данные этих блоков обеспечивают основу для фазовых графиков, показывающих различные пути линии связи.
Предоставить входной сигнал включения соединения, указать внутреннюю механику соединения и определить координаты положения концевых рам звена ответвителя.
В командной строке MATLAB ® введитеsmdoc_four_bar. Открывается четырехпланочная модель. Инструкции по созданию этой модели см. в разделе Модель кинематической цепи с замкнутым контуром.
В диалоговом окне «Base-Crank Revolute Joint block» в раскрывающемся списке «Включение > Крутящий момент» выберите Provided by Input. Блок открывает входной порт физического сигнала с меткой t.
Перетащите эти блоки в модель. Блоки позволяют задать сигнал крутящего момента срабатывания.
| Библиотека | Блок |
|---|---|
| Simulink > Источники | Постоянный |
| Simscape > Утилиты | Конвертер Simulink-PS |
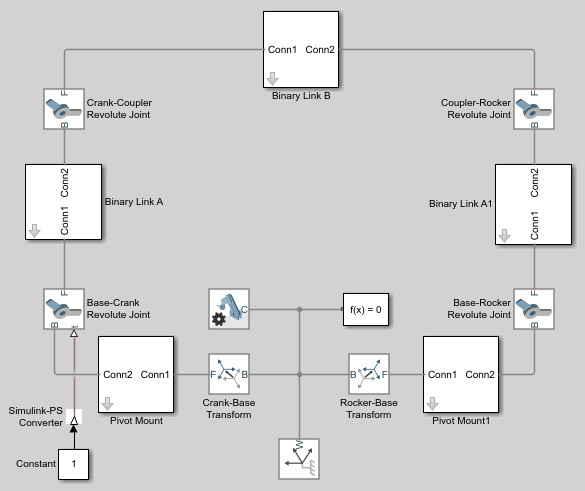
Подключите блоки, как показано на рисунке. Новые блоки затенены серым цветом.
Реальные соединения рассеивают энергию из-за демпфирования. Демпфирование соединений можно задать непосредственно в диалоговых окнах блоков. В каждом диалоговом окне блока «Поворотное соединение» в разделе «Внутренняя механика» > «Коэффициент демпфирования» введите 5e-4 и нажмите OK.
Добавьте эти блоки в модель. Блоки позволяют определять положение кадра во время моделирования.
| Библиотека | Блок | Количество |
|---|---|---|
| Simscape > Multibody > Кадры и преобразования | Трансформировать сенсор | 2 |
| Simscape > Multibody > Кадры и преобразования | Мировая рамка | 1 |
| Simscape > Утилиты | Преобразователь PS-Simulink | 4 |
| Simulink > Раковины | К рабочему пространству | 4 |
В диалоговых окнах Блок датчика преобразования выберите Перемещение > Y и Перемещение > Z. При необходимости измените размер блока.
В диалоговом окне «Параметры блока выходных сигналов PS-Simulink Converter» введите cm.
В параметрах «Имя переменной» диалоговых окон «К блоку рабочего пространства» введите имена переменных:
y_crank
z_crank
y_rocker
z_rocker
Подключите блоки и присвойте им имя, как показано на рисунке, поворачивая их по мере необходимости. Убедитесь, что блоки To Workspace с именами переменных z_crank и z_rocker соединяются с портами z-кадра блоков Transform Sensor. Новые блоки затенены желтым цветом.
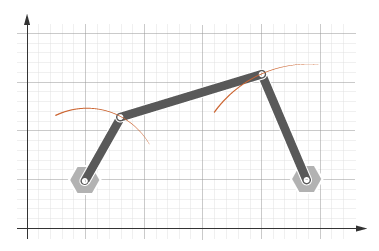
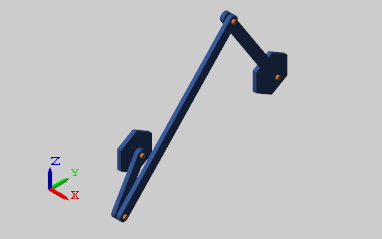
Запустите моделирование. Это можно сделать на панели инструментов Simulink, нажав кнопку запуска. Mechanics Explorer воспроизводит основанную на физике анимацию сборки из четырех панелей.
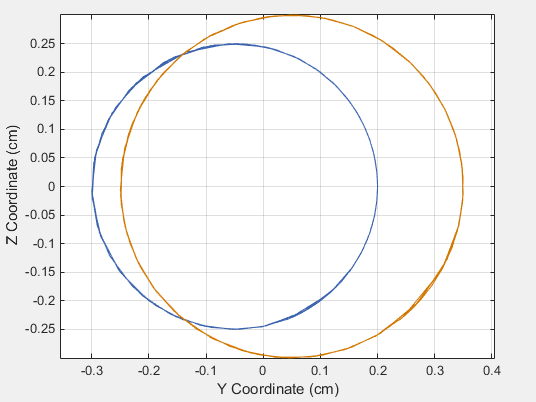
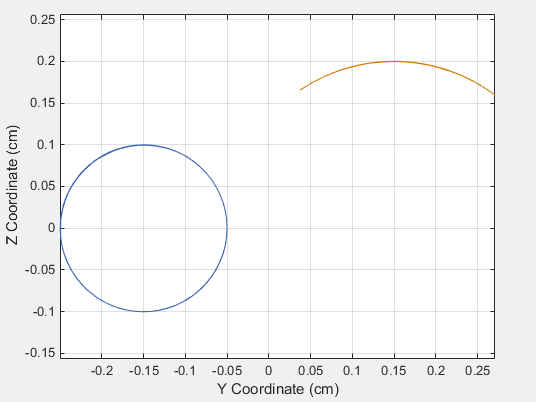
После завершения моделирования можно построить график координат положения концевых кадров связи ответвителя, например, введя следующий код в командной строке MATLAB:
figure;
plot(y_crank.data, z_crank.data, 'color', [60 100 175]/255);
hold;
plot(y_rocker.data, z_rocker.data, 'color', [210 120 0]/255);
xlabel('Y Coordinate (cm)');
ylabel('Z Coordinate (cm)');
axis equal; grid on;На рисунке показан график, который открывается. Этот график показывает, что кривошип завершает полный оборот, в то время как коромысло завершает частичный оборот, например, он колеблется. Такое поведение характерно для кривошипно-коромысловых систем.
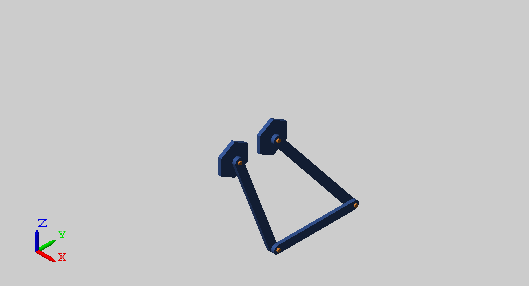
Попробуйте смоделировать модель в режиме двойного кривошипа. Четырехпалубное звено можно преобразовать в двухкривошипное звено путем изменения длины двоичного звена в соответствии с таблицей.
| Блок | Параметр | Стоимость |
|---|---|---|
| Двоичный канал A | Длина | 25 |
| Двоичный канал B | Длина | 20 |
| Двоичная ссылка A1 | Длина | 30 |
| Преобразование «кривошип-база» | Перевод > Смещение | 5 |
| Преобразование Rocker-Base | Перевод > Смещение | 5 |
Обновите и смоделируйте модель. На рисунке показано обновленное отображение визуализации в обозревателе Mechanics.
Постройте график координат положения концевых кадров звена ответвителя. В командной строке MATLAB введите:
figure;
plot(y_crank.data, z_crank.data, 'color', [60 100 175]/255);
hold;
plot(y_rocker.data, z_rocker.data, 'color', [210 120 0]/255);
xlabel('Y Coordinate (cm)');
ylabel('Z Coordinate (cm)');
axis equal; grid on;На рисунке показан график, который открывается. Этот график показывает, что оба звена завершают полный оборот. Такое поведение характерно для двухкруговых связей.