Планетарные зубчатые передачи распространены в промышленных, автомобильных и аэрокосмических системах. Типичное применение - система АКПП автомобиля. С кинематической точки зрения, этот механизм отделен кинематическим ограничением, установленным между зубчатыми парами. Эти ограничения фиксируют угловые отношения скоростей зубчатых пар, заставляя зубчатые колеса в каждой паре двигаться синхронно.
В Simscape™ Multibody™ кинематическая зависимость между сетчатыми зубчатыми колесами отображается с помощью блоков из вспомогательной библиотеки зубчатых колес. В этом учебном пособии показано, как использовать эти блоки для моделирования планетарной зубчатой передачи. Зубчатая передача содержит четыре корпуса:
Солнечная шестерня
Планетарная передача
Зубчатое кольцо
Планетоносец
Каждое тело, включая носитель планеты, может вращаться вокруг своей центральной оси. Кроме того, каждая планетарная шестерня может вращаться вокруг солнечной шестерни. Соединительные блоки обеспечивают требуемые степени свободы, в то время как блоки зависимостей зубчатой передачи обеспечивают перемещение зубчатых колес так, как будто они находятся в сетке.
Смоделировать тела зубчатых колес и соединить их с соответствующими степенями свободы. На следующем шаге к этой модели добавляются ограничения зубчатого колеса.
Перетащите эти блоки в новую модель.
| Библиотека | Блок | Количество |
|---|---|---|
| Элементы корпуса | Выдавленное твердое тело | 2 |
| Суставы | Шарнир вращения | 1 |
| Суставы | Плоское соединение | 1 |
| Кадры и преобразования | Жесткое преобразование | 1 |
| Кадры и преобразования | Мировая рамка | 1 |
| Утилиты | Конфигурация механизма | 1 |
| Simscape > Утилиты | Конфигурация решателя | 1 |
Подключите блоки и присвойте им имя, как показано на рисунке.
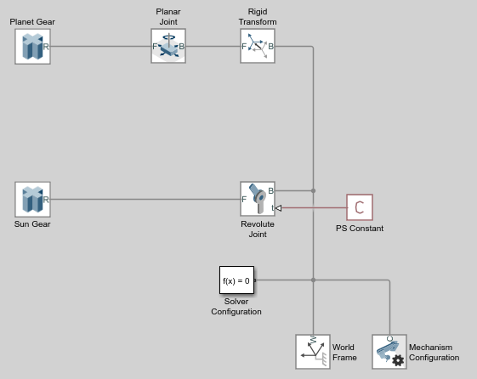
В диалоговом окне Блок солнечного зубчатого колеса (Sun Gear Block) задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Геометрия > Поперечное сечение |
Войти |
| Геометрия > Длина | Войти T. Выбор единиц измерения cm. |
| Инерция > Плотность | Войти Rho. |
| Графика > Визуальные свойства > Цвет | Войти Sun.RGB. |
simmechanics.demohelpers.gear_profile функция формирует матрицу поперечного сечения для внешнего зубчатого колеса с эвольвентным профилем зубьев. Поперечное сечение приблизительное. Используйте функцию только в качестве примера.
В диалоговом окне Блок планетарной передачи (Planet Gear) задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Геометрия > Поперечное сечение | Войти simmechanics.demohelpers.gear_profile(2*Planet.R,Planet.N,A). Выбор единиц измерения cm. |
| Геометрия > Длина | Войти T. Выбор единиц измерения cm. |
| Инерция > Плотность | Войти Rho. |
| Графика > Визуальные свойства > Цвет | Войти Planet.RGB. |
В диалоговом окне «Блок жесткого преобразования» задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Перевод > Метод | Выбрать Standard Axis. |
| Перемещение > Ось | Выбрать +Y. |
| Перевод > Смещение | Войти Sun.R + Planet.R. Выбор единиц измерения cm. |
В рабочем пространстве модели определите параметры блока с помощью кода MATLAB ®:
% Common Parameters Rho = 2700; T = 3; A = 0.8; % Gear Addendum % Sun Gear Parameters Sun.RGB = [0.75 0.75 0.75]; Sun.R = 15; Sun.N = 40; % Planet Gear Parameters Planet.RGB = [0.65 0.65 0.65]; Planet.R = 7.5; Planet.N = Planet.R/Sun.R*Sun.N;
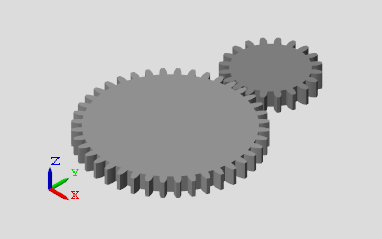
Моделирование модели. Чтобы вызвать движение, попробуйте настроить цели состояния скорости в диалоговых окнах блока соединения. Обратите внимание, что солнечные и планетарные шестерни движутся независимо друг от друга. Чтобы ограничить движение зубчатого колеса, необходимо добавить блок ограничения зубчатого колеса между блоками твердого тела зубчатого колеса.
Можно открыть копию результирующей модели. В командной строке MATLAB введите smdoc_planetary_gear_a.
Укажите кинематические зависимости, действующие между солнечными и планетарными зубчатыми колесами. Эти зависимости гарантируют перемещение зубчатых колес в виде сетки.
Перетащите эти блоки в модель зубчатого колеса солнечной планеты.
| Библиотека | Блок |
|---|---|
| Ограничения | Зависимость расстояния |
| Зубчатые колеса и муфты > Зубчатые колеса | Зависимость общего зубчатого колеса |
Подключите блоки, как показано на рисунке. Новые блоки подсвечиваются.
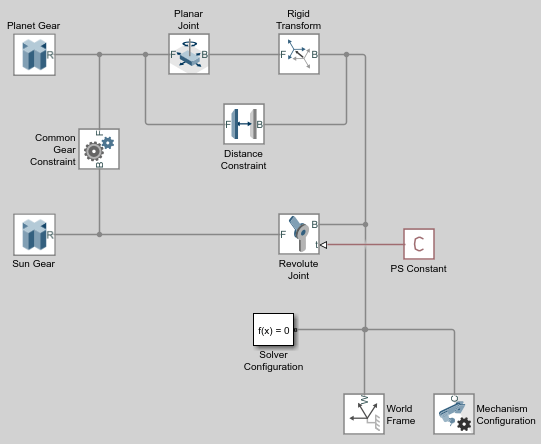
В диалоговом окне «Общий блок зависимости зубчатого колеса» задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Метод спецификации | Выбрать Pitch Circle Radii. |
| Метод спецификации > Радиус базовой шестерни | Войти Sun.R. Выбор единиц измерения cm. |
| Метод спецификации > Радиус зубчатого колеса толкателя | Войти Planet.R. Выбор единиц измерения cm. |
В диалоговом окне «Блок зависимости расстояния» задайте следующий параметр:
Расстояние - Ввод Sun.R + Planet.R. Выбор единиц измерения cm.
Моделирование модели. Чтобы вызвать движение, попробуйте настроить цели состояния скорости в диалоговых окнах блока соединения. Обратите внимание, что солнечные и планетарные шестерни теперь движутся синхронно.
Можно открыть копию результирующей модели. В командной строке MATLAB введите smdoc_planetary_gear_b.
Смоделировать тело кольцевого зубчатого колеса, соединить его с соответствующими степенями свободы и ограничить его движение относительно планетарного зубчатого колеса.
Добавьте эти блоки в модель зубчатого колеса солнечной планеты.
| Библиотека | Блок |
|---|---|
| Элементы корпуса | Выдавленное твердое тело |
| Суставы | Шарнир вращения |
| Зубчатые колеса и муфты > Зубчатые колеса | Зависимость общего зубчатого колеса |
Подключите блоки и присвойте им имя, как показано на рисунке. Новые блоки подсвечиваются.
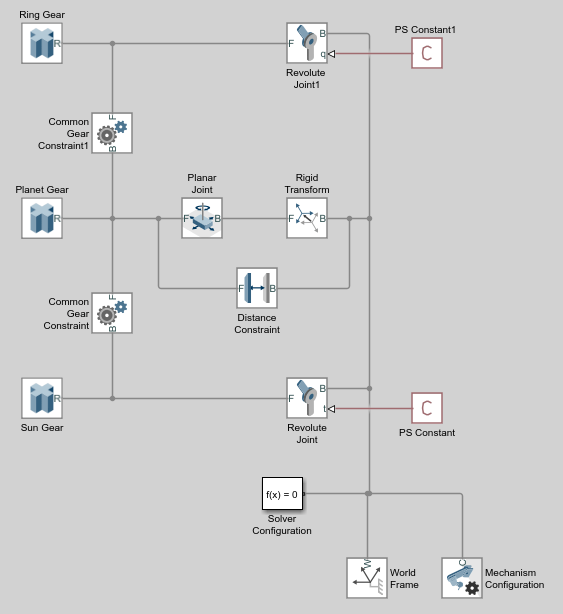
В диалоговом окне «Блок зубчатого венца» задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Геометрия > Поперечное сечение | Войти Ring.CS. Выбор единиц измерения cm. |
| Геометрия > Длина | Войти T. |
| Инерция > Плотность | Войти Rho. |
| Графика > Визуальные свойства > Цвет | Войти Ring.RGB. |
В диалоговом окне «Общий блок Constraint1 зубчатой передачи» задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Напечатать | Выбрать Internal. |
| Метод спецификации | Выбрать Pitch Circle Radii. |
| Метод спецификации > Радиус базовой шестерни | Войти Planet.R. Выбор единиц измерения cm. |
| Метод спецификации > Радиус зубчатого колеса толкателя | Войти Ring.R. Выбор единиц измерения cm. |
В рабочем пространстве модели определите параметры блока зубчатого венца с помощью кода MATLAB:
% Ring Gear Parameters Ring.RGB = [0.85 0.45 0]; Ring.R = Sun.R + 2*Planet.R; Ring.N = Ring.R/Planet.R*Planet.N; Ring.Theta = linspace(-pi/Ring.N,2*pi-pi/Ring.N,100)'; Ring.RO = 1.1*Ring.R; Ring.CSO = [Ring.RO*cos(Ring.Theta) Ring.RO*sin(Ring.Theta)]; Ring.CSI = simmechanics.demohelpers.gear_profile(2*Ring.R,Ring.N,A); Ring.CSI = [Ring.CSI; Ring.CSI(1,:)]; Ring.CS = [Ring.CSO; flipud(Ring.CSI)];
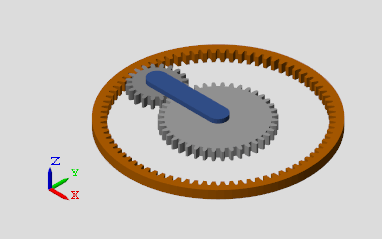
Моделирование модели. Чтобы вызвать движение, попробуйте настроить цели состояния скорости в диалоговых окнах блока соединения. Обратите внимание, что солнечные, планетарные и кольцевые шестерни перемещаются в сетчатом режиме.
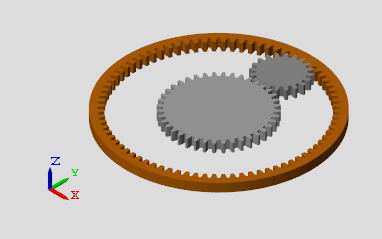
Можно открыть копию результирующей модели. В командной строке MATLAB введите smdoc_planetary_gear_c.
На данный момент солнечные и планетарные шестерни удерживаются на фиксированном расстоянии с помощью блока «Зависимость расстояния». В реальной планетарной передаче это ограничение обеспечивается зубчатым колесом. Смоделировать зубчатое колесо и соединить его между солнечными и планетарными шестернями.
Удалите эти блоки из модели планетарной передачи:
Плоское соединение
Жесткое преобразование
Зависимость расстояния
Добавьте эти блоки в модель планетарной передачи.
| Библиотека | Блок | Количество |
|---|---|---|
| Элементы корпуса | Выдавленное твердое тело | 1 |
| Суставы | Шарнир вращения | 2 |
| Кадры и преобразования | Жесткое преобразование | 2 |
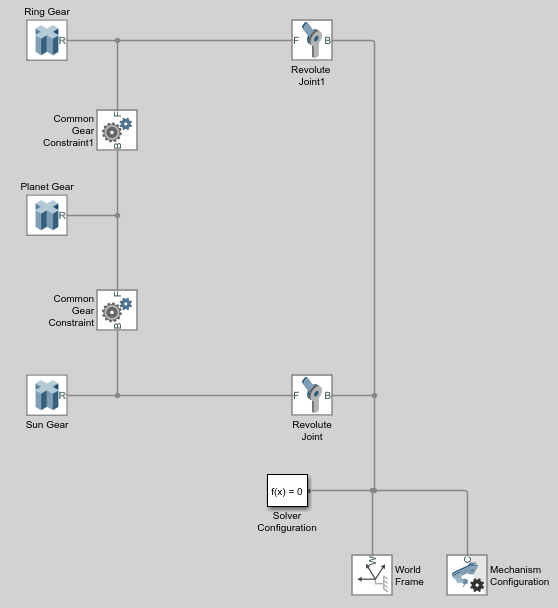
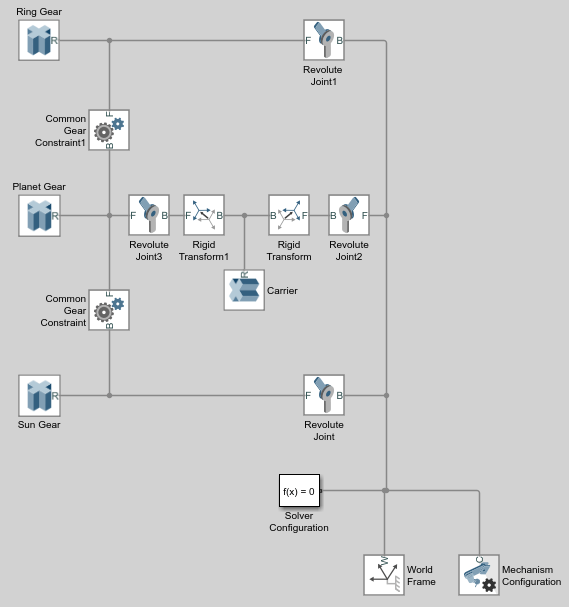
Подключите блоки и присвойте им имя, как показано на рисунке.
Обратите пристальное внимание на ориентацию блока жесткого преобразования: порты B-кадра должны быть обращены к блоку твердого тела. Новые блоки подсвечиваются.
В диалоговом окне «Несущий блок» задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Геометрия > Поперечное сечение | Войти Carrier.CS. Выбор единиц измерения cm. |
| Геометрия > Длина | Войти Carrier.T. |
| Инерция > Плотность | Войти Rho. |
| Графика > Визуальные свойства > Цвет | Войти Carrier.RGB. |
В диалоговом окне «Блок жесткого преобразования» задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Перевод > Метод | Выбрать Cartesian. |
| Перевод > Смещение | Войти [Carrier.L/2 0 -(Carrier.T+T)/2]. Выбор единиц измерения cm. |
В диалоговом окне «Блок жестких Transform1» задайте эти параметры.
| Параметр | Настройка |
|---|---|
| Перевод > Метод | Выбрать Cartesian. |
| Перевод > Смещение | Войти [-Carrier.L/2 0 -(Carrier.T+T)/2]. Выбор единиц измерения cm. |
В рабочем пространстве модели определите параметры блока Carrier с помощью кода MATLAB:
% Gear Carrier Parameters Carrier.RGB = [0.25 0.4 0.7]; Carrier.L = Sun.R + Planet.R; Carrier.W = 2*T; Carrier.T = T/2; Theta = (90:1:270)'*pi/180; Beta = (-90:1:90)'*pi/180; Carrier.CS = [-Carrier.L/2 + Carrier.W/2*cos(Theta) ... Carrier.W/2*sin(Theta); Carrier.L/2 + Carrier.W/2*cos(Beta), ... Carrier.W/2*sin(Beta)];
Моделирование модели. Чтобы вызвать движение, попробуйте настроить цели состояния скорости в диалоговых окнах блока соединения. Обратите внимание, что держатель зубчатого колеса теперь выполняет задачу блока «Зависимость расстояния».
Можно открыть копию результирующей модели. В командной строке MATLAB введите smdoc_planetary_gear_d.
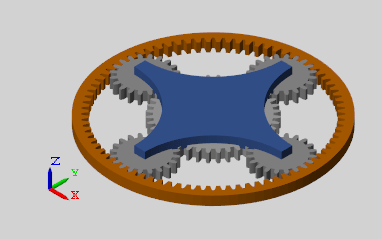
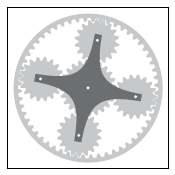
Поэкспериментируйте с моделью, добавив больше планетарных шестерен. Помните, что вы должны изменить тело носителя, чтобы разместить любые дополнительные планетарные шестерни. Для просмотра примера с четырьмя планетарными передачами в командной строке MATLAB введите smdoc_planetary_gear_e.