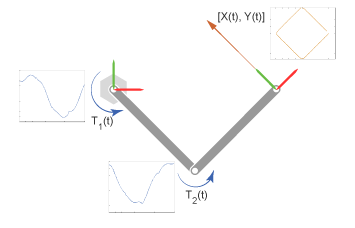
Зондирование позволяет выполнять аналитические задачи для модели. Например, можно выполнить обратный кинематический анализ модели роботизированного манипулятора. Предписывая траекторию конечного эффектора и измеряя силы и моменты приведения в действие соединения, можно получить изменяющийся во времени профиль каждого входного сигнала приведения в действие соединения.
Переменные, которые вы назначаете, входные данные модели и те, которые вы чувствуете, выходные данные модели, определяют, какие типы анализа вы можете выполнить. Изменяя входные и выходные данные модели, можно выполнить множество других типов анализа. Например, для выполнения прямого кинематического анализа модели роботизированного манипулятора можно назначить траектории соединения манипулятора и определить результирующую траекторию «конец-эффектор».
Для поддержки различных аналитических задач программное обеспечение Simscape™ Multibody™ предоставляет широкий спектр переменных, которые можно определить. Каждая переменная принадлежит к одной из двух категорий:
Переменные движения - линейное и угловое положение, скорость и ускорение. Линейные переменные доступны в различных системах координат, включая декартовы, сферические и цилиндрические. Угловые переменные доступны в различных форматах, включая кватернион, ось-угол и матрицу преобразования.
Переменные силы и крутящего момента - включение, ограничение и суммарные силы и моменты, действующие в соединении, а также определенные силы и моменты, действующие вне соединения.
Вся возможность считывания охватывает несколько блоков Simscape Multibody. Два типа блоков обеспечивают восприятие движения:
Блоки соединения - измерение движения между рамами основания и порта толкателя блока соединения. Переменные, которые можно почувствовать, организованы по примитивам суставов (призматическим, поворотным или сферическим).
Блок Transform Sensor - измерение движения между любыми двумя кадрами в модели. Этот блок обеспечивает наиболее полную возможность измерения движения в Simscape Multibody.
Три типа блоков обеспечивают измерение силы и крутящего момента:
Соединительные блоки - включение, ограничение и измерение общей силы и крутящего момента между базовой рамой и рамой порта толкателя. Датчик силы и момента срабатывания выполнен по примитиву соединения.
Блоки зависимостей (Constraint blocks) - сила зависимости и крутящий момент между базовой рамкой и рамкой порта толкателя.
Определенные блоки сил и крутящих моментов - полная сила, оказываемая блоком между кадрами порта основания и порта толкателя. Только некоторые блоки Сил и Крутящих Моментов обеспечивают этот тип зондирования, такие как Сила Пружины и Демпфера и Сила Закона Обратного Квадрата.
Каждый выходной сигнал датчика имеет физический формат сигнала. Физические сигналы можно преобразовывать в сигналы Simulink ® с помощью блоков преобразователя Simscape, например, для печати с помощью блока Scope. Сведения об использовании физических сигналов в моделях Simscape Multibody см. в разделе Включение и зондирование физических сигналов.
Обратная квадратная сила закона | Объем | Сила пружины и демпфера | Трансформировать сенсор
