Составная модель двигателя с электрическими характеристиками и характеристиками крутящего момента, а также моделирование неисправностей
Simscape/Электрические/Электромеханические/Щеточные двигатели
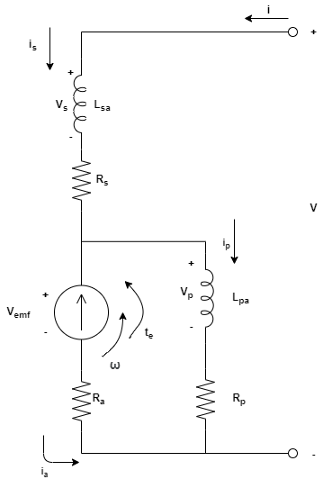
Блок «Составной двигатель» представляет электрические и крутящие характеристики составного двигателя. На этом рисунке показана эквивалентная схема двигателя с коротким шунтом:
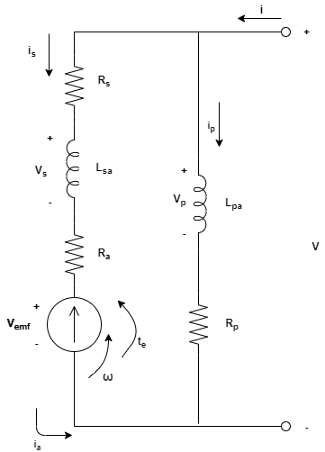
На этом рисунке показана эквивалентная схема двигателя с длинным шунтом:
где:
i - общий ток.
- последовательный ток обмотки поля.
ip - ток обмотки параллельного поля.
ia - ток якоря.
V - общее напряжение.
Vs - последовательное напряжение обмотки поля.
Vp - напряжение обмотки параллельного поля.
Va - напряжение якоря.
λ - угловая скорость.
te - крутящий момент.
Если для параметра Параметризация стационарного состояния (Steady-state parameterization) задано значение By equivalent circuit parameters, можно задать эквивалентные параметры цепи для этой модели:
Ra - Сопротивление якоря, Ra
Rs - сопротивление обмотки поля серии, Rs
Rp - Сопротивление обмотки шунтирующего поля, Rp
Lsa - последовательная обмотка поля до постоянной ЭДС задней части якоря, Lsa
Lpa - обмотка шунтирующего поля до постоянной ЭДС задней части якоря, Lpa
Если для топологии электрической цепи установлено значение Short-shunt, электрические динамические уравнения:
Это механические динамические уравнения для двигателя с коротким шунтом:
) ia
Из этих динамических уравнений блок получает установившиеся уравнения, делая производные равными нулю:
РпипРпип = Вемф + Ра (есть − ип)
Затем вычисляет установившиеся токи и крутящий момент следующим образом:
Если для топологии электрической цепи установлено значение Long-shunt, электрические динамические уравнения:
Это механические динамические уравнения для двигателя с длинным шунтом:
) ia
Из этих динамических уравнений блок получает установившиеся уравнения, делая производные равными нулю:
Vemf + (Ra + Rs) =
Затем вычисляет установившиеся токи и крутящий момент следующим образом:
VRp + RpV − LpaVstartRp (Ra + R+ L+ L
Блок «Составной двигатель» позволяет моделировать три типа неисправностей:
Отказ обмотки якоря - обмотка якоря выходит из строя и становится разомкнутой.
Отказ последовательной обмотки поля - последовательная обмотка поля выходит из строя и становится разомкнутой.
Отказ обмотки шунтирующего поля - обмотка шунтирующего поля выходит из строя и становится разомкнутой.
Блок может инициировать события отказа:
В определенное время (временной отказ)
При превышении текущего предела более чем на определенный интервал времени (поведенческий сбой)
Эти механизмы триггера можно включать или отключать отдельно.
С помощью параметра Reporting when a fault можно указать, выдавать ли утверждение при возникновении сбоя. Утверждение может иметь форму предупреждения или ошибки. По умолчанию блок не выдает утверждение.
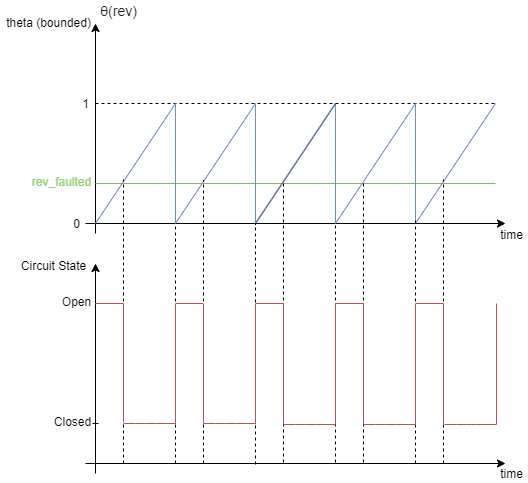
Если для параметра Enable armature winding open-circuit fault установлено значение Yes, якорь выходит из строя в момент времени, заданный параметром Time (Время), в который инициируется отказ обмотки якоря для временного сбоя, или когда токи обмотки превышают значение параметра Maximum allowed armature (Максимально допустимый ток обмотки якоря) для поведенческого сбоя. Когда якорь выходит из строя, источник напряжения, подключенный к этому блоку, наблюдает разомкнутую цепь для части полного оборота двигателя, определяемого долей вращения, в течение которой якорь является параметром разомкнутой цепи. На этом рисунке показано поведение состояния цепи и состояние разомкнутой цепи (rev_faulted) на период революции:
Блок имеет три дополнительных тепловых порта, которые по умолчанию скрыты. Чтобы открыть тепловые порты, щелкните блок правой кнопкой мыши и в контекстном меню выберите «Simscape» > «Block choices» > «Show thermal port».
Используйте тепловые порты для моделирования влияния потерь сопротивления меди, которые преобразуют электроэнергию в тепло. Дополнительные сведения об использовании тепловых портов в блоках привода см. в разделе Моделирование тепловых эффектов во вращательных и поступательных приводах.
Тип, видимость и расположение портов блока зависят от настройки параметра «Топология электрической цепи» на вкладке «Конфигурация», а также от отображения тепловых портов:
| Топология электрических цепей | Тепловые порты | Блок |
|---|---|---|
Long-shunt | Hidden |
|
Visible |
| |
Short-shunt | Hidden |
|
Visible |
|




