Модель двигателя постоянного тока с электрическими характеристиками и характеристиками крутящего момента, а также моделирование неисправностей
Simscape/Электрические/Электромеханические/Щеточные двигатели
Блок двигателя постоянного тока представляет электрические и крутящие характеристики двигателя постоянного тока с использованием следующей эквивалентной модели цепи:
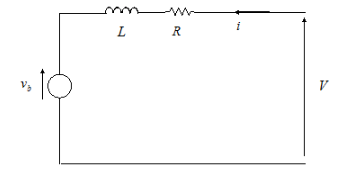
Параметры эквивалентной цепи для этой модели задаются при установке для параметра параметризации модели значения By equivalent circuit parameters. Резистор R соответствует сопротивлению, указанному в параметре сопротивления якоря. Индуктор L соответствует индуктивности, указанной в параметре индуктивности якоря.
Можно указать, как создавать магнитное поле двигателя постоянного тока, установив для параметра Тип поля (Field type) требуемую опцию. Постоянные магниты в двигателе вызывают следующую обратную emf vb в якоре:
квом
где kv - постоянная Back-emf, а λ - угловая скорость. Двигатель создает следующий крутящий момент, который пропорционален току i двигателя:
kti
где kt - постоянная крутящего момента. Блок двигателя постоянного тока предполагает отсутствие электромагнитных потерь. Это означает, что механическая мощность равна электрической мощности, рассеиваемой задней emf якоря. Приравнивание этих двух терминов дает:
kvü ikv = kt
В результате в параметрах блока задаются kv или kt.
Если магнитное поле генерируется от тока, протекающего через обмотки, константа Back-emf зависит от тока поля If:
LafIf
где Laf - взаимная индуктивность якоря Поля.
Характеристика крутящего момента и частоты вращения для блока двигателя постоянного тока связана с параметрами на предыдущем рисунке. Если для параметра Параметризация модели (Model parameterization) задано значение By stall torque & no-load speed или By rated power, rated speed & no-load speed, блок решает для эквивалентных параметров цепи следующим образом:
Для установившегося соотношения крутящий момент-скорость L не имеет эффекта.
Суммировать напряжения вокруг контура и перегруппировать для i:
V − kvstartR
Подставьте это значение i в уравнение для крутящего момента:
квом)
Если для параметра Параметризация модели (Model parameterization) задано значение By stall torque & no-load speedблок использует предыдущее уравнение для определения значений для R и kt (и эквивалентно kv).
Если для параметра Параметризация модели (Model parameterization) задано значение By rated power, rated speed & no-load speedблок использует номинальную скорость и мощность для вычисления номинального крутящего момента. Блок использует номинальные значения крутящего момента и частоты вращения без нагрузки в предыдущем уравнении для определения значений R и kt.
Блок моделирует инерцию двигателя J и демпфирование λ для всех значений параметра параметризации модели. Результирующий крутящий момент на блоке:
−Jω˙−λω
Измерение демпфирования ротора возможно не всегда, а демпфирование ротора не всегда предоставляется в спецификации производителя. Альтернативой является использование тока холостого хода для определения величины демпфирования ротора.
Для холостого хода электромеханический момент должен быть равен демпфирующему моменту ротора:
λ groupnoload
где inoload - ток холостого хода. При выборе By no-load current для параметра параметризации демпфирования ротора это уравнение используется в дополнение к уравнению крутящий момент-частота вращения для определения значений λ и других коэффициентов уравнения.
Значение демпфирования ротора, указанное непосредственно или в терминах тока холостого хода, учитывается при определении эквивалентных параметров цепи для опций параметризации модели. By stall torque and no-load speed и By rated power, rated speed and no-load speed.
Когда положительный ток течет от электрических + к - окнам, положительный крутящий момент действует от механических С к R окнам.
Блок двигателя постоянного тока позволяет моделировать два типа неисправностей:
Отказ обмотки якоря - обмотка якоря выходит из строя и разомкнута.
Отказ обмотки поля - обмотка поля, создающая магнитное поле, выходит из строя и разомкнута.
Блок может инициировать события отказа:
В определенное время (временной отказ).
При превышении текущего предела более чем на определенный интервал времени (поведенческий сбой).
Эти механизмы триггера можно включать или отключать отдельно.
Можно выбрать, выдавать ли утверждение при возникновении сбоя, используя параметр Reporting when a fault. Утверждение может иметь форму предупреждения или ошибки. По умолчанию блок не выдает утверждение.
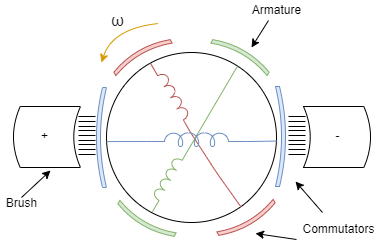
На этом рисунке показано общее представление двигателя постоянного тока с щетками, арматурой, коммутаторами и их обмотками:
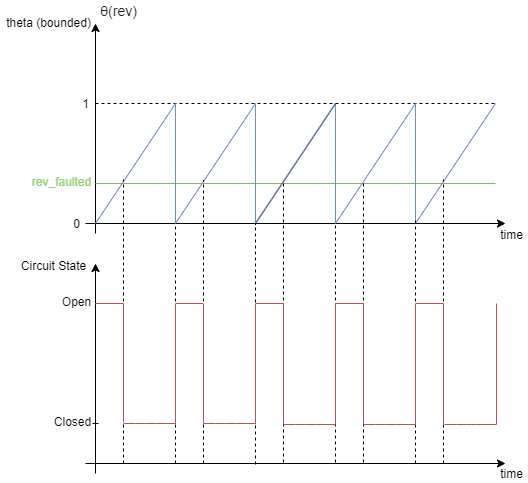
Если для параметра Enable armature winding open-circuit fault установлено значение Yes, якорь выходит из строя в момент времени, заданный параметром Time (Время), в который инициируется отказ обмотки якоря для временного сбоя, или когда токи обмотки превышают значение параметра Maximum allowed armature (Максимально допустимый ток обмотки якоря) для поведенческого сбоя. Когда якорь выходит из строя, источник напряжения, подключенный к этому блоку, наблюдает разомкнутую цепь для части полного оборота двигателя, определяемого дробью вращения, в течение которой якорь является параметром разомкнутой цепи, rev_faulted. Этот рисунок иллюстрирует поведение состояния цепи для определенного rev_faulted в течение всего периода революции:
Блок имеет дополнительный тепловой порт, скрытый по умолчанию. Чтобы открыть тепловой порт, щелкните правой кнопкой мыши блок в модели, а затем в контекстном меню выберите Simscape > Block choices > Show thermal port. Это действие отображает тепловой порт H на значке блока и отображает параметры Температурная зависимость (Temperature Dependence) и Тепловой порт (Thermal Port).
Используйте тепловой порт для моделирования влияния потерь сопротивления меди, которые преобразуют электроэнергию в тепло. Дополнительные сведения об использовании тепловых портов и о параметрах температурной зависимости и теплового порта см. в разделе Моделирование тепловых эффектов во вращательных и поступательных приводах.
[1] Болтон, В. Мехатроника: Электронные системы управления в машиностроении и электротехнике, 3-е издание Pearson Education, 2004..
Индукционная машина (однофазная) | Двигатель и привод (уровень системы) | Шунт-мотор | Универсальный двигатель




