Синхронная машина дискретного или непрерывного времени DC2C система возбуждения, включающая автоматический регулятор напряжения и возбудитель
Управление Simscape/Electrical/Control/SM
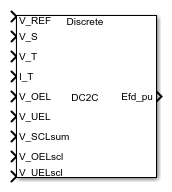
Блок DC2C СМ моделирует синхронную машинную систему возбуждения типа DC2C, которая соответствует IEEE 421.5-2016 [1].
Используйте этот блок для моделирования управления и регулирования напряжения поля синхронной машины, работающей как генератор с помощью вращающегося возбудителя коммутатора постоянного тока.
Можно переключаться между непрерывной и дискретной реализациями блока с помощью параметра Sample time (-1 для унаследованного). Чтобы настроить интегратор на непрерывное время, установите для свойства Sample time (-1 для унаследованного) значение 0. Чтобы настроить интегратор на дискретное время, установите для свойства Sample time (-1 для унаследованного) положительное, ненулевое значение или значение -1 для наследования времени выборки из восходящего блока.
Блок SM DC2C состоит из четырех основных компонентов:
Компенсатор тока изменяет измеренное напряжение на клемме как функцию тока на клемме.
Измерительный преобразователь напряжения моделирует динамику контактного преобразователя напряжения с помощью фильтра нижних частот.
Компонент элементов управления возбуждением сравнивает выходной сигнал преобразователя напряжения с опорным напряжением клеммы для получения ошибки напряжения. Эта ошибка напряжения затем проходит через регулятор напряжения для создания напряжения возбуждения возбудителя.
Вращающийся возбудитель постоянного тока моделирует вращающийся возбудитель коммутатора постоянного тока и создает напряжение поля, которое подается на управляемую синхронную машину. Блок также подает напряжение поля обратно в систему возбуждения.
На этой диаграмме показана общая структура модели системы возбуждения DC2C:
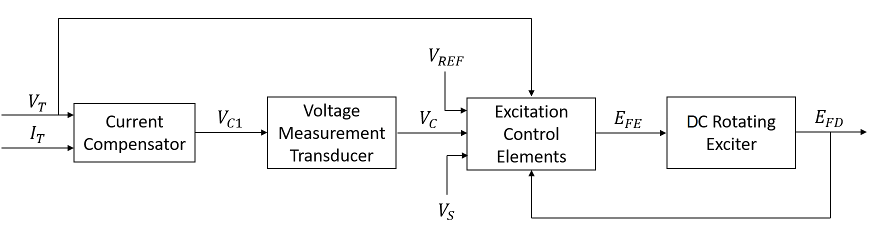
На схеме:
VT и IT - измеренное напряжение на клеммах и ток синхронной машины.
VC1 - напряжение на клемме с компенсацией тока.
VC - отфильтрованное напряжение на клемме с компенсацией тока.
VREF - опорное напряжение на клемме.
VS - напряжение стабилизатора системы питания.
EFE - напряжение поля возбудителя.
EFD - напряжение поля.
В следующих разделах подробно описывается каждая из основных частей блока.
Компенсатор тока моделируется как:
+ XC2,
где:
RC - сопротивление компенсации нагрузки.
XC - реактивное сопротивление компенсации нагрузки.
Измерительный преобразователь напряжения выполнен в виде блока фильтра нижних частот с постоянной времени TR. Сведения о точных дискретных и непрерывных реализациях см. в документации по этому блоку.
Эта диаграмма иллюстрирует общую структуру элементов управления возбуждением:
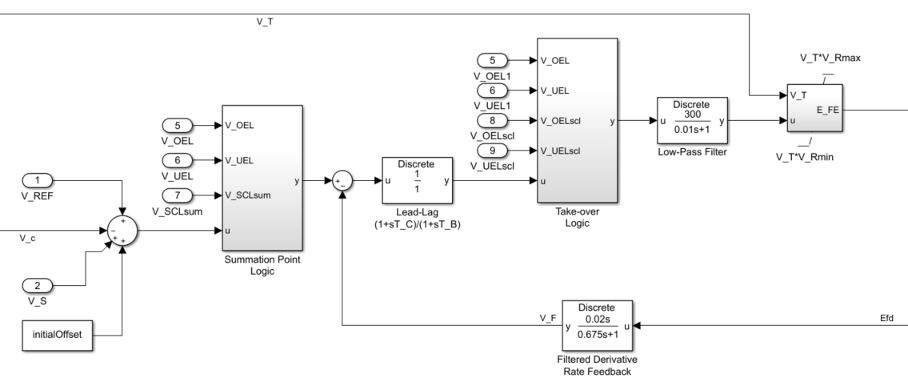
На схеме:
Подсистема логики точки суммирования моделирует входное местоположение точки суммирования для напряжений ограничителя сверхвыпуска (OEL), ограничителя недозволенности (UEL) и ограничителя тока статора (SCL). Дополнительные сведения об использовании ограничителей с этим блоком см. в разделе Ограничения тока поля.
Блок Lead-Lag моделирует дополнительную динамику, связанную с регулятором напряжения. Здесь TC - постоянная времени опережения, а TB - постоянная времени запаздывания. Сведения о точных дискретных и непрерывных реализациях см. в документации по блокам Lead-Lag.
Блок фильтра нижних частот моделирует основную динамику регулятора напряжения. Здесь KA - коэффициент усиления регулятора, а TA - основная постоянная времени регулятора. Минимальными и максимальными пределами насыщения от навивки для блока являются VRmin и VRmax соответственно.
Подсистема Take-over Logic моделирует местоположение входа точки приема для напряжений OEL, UEL и SCL. Дополнительные сведения об использовании ограничителей с этим блоком см. в разделе Ограничения тока поля.
Блок отфильтрованной производной моделирует траекторию обратной связи скорости для стабилизации системы возбуждения. Здесь KF и TF являются коэффициентами усиления и постоянной времени этой системы соответственно. Точные дискретные и непрерывные реализации см. в документации по блоку отфильтрованных производных.
VT * VRmax и VT * VRmin - минимальные и максимальные пределы насыщения для выходного напряжения поля возбудителя EFE.
Для изменения выходного сигнала регулятора напряжения в небезопасных рабочих условиях можно использовать различные ограничители тока поля:
Для предотвращения перегрева обмотки поля из-за чрезмерной потребности в токе поля используйте ограничитель перегрузки.
Используйте ограничитель неполучения, чтобы увеличить возбуждение поля, когда оно слишком низкое, что может привести к риску десинхронизации.
Используйте ограничитель тока статора для предотвращения перегрева обмоток статора из-за избыточного тока.
Присоедините выход любого из этих ограничителей в одной из следующих точек:
Точка суммирования в составе контура обратной связи автоматического регулятора напряжения (АВР)
Точка захвата для переопределения обычного поведения AVR
При использовании ограничителя тока статора в точке суммирования используйте одиночный вход VSCLsum. При использовании ограничителя тока статора в точке захвата используйте как вход сверхвыпуска VOELscl, так и вход недозволения VTONscl.
Эта диаграмма иллюстрирует общую структуру вращающегося возбудителя коммутатора постоянного тока:
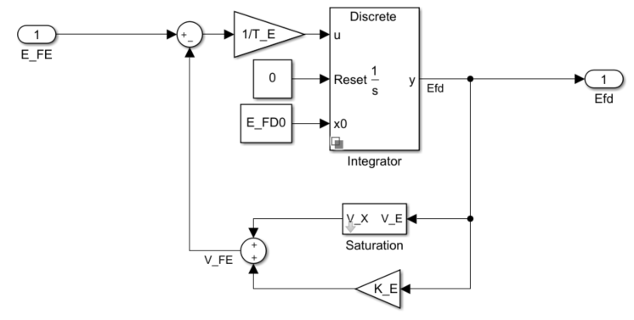
На схеме:
Ток поля возбудителя VFE моделируется как суммирование двух сигналов:
Нелинейная функция Vx моделирует насыщение выходного напряжения возбудителя.
Пропорциональный член KE моделирует линейную зависимость между выходным напряжением возбудителя и током поля возбудителя.
Подсистема интегратора интегрирует разницу между EFE и VFE для формирования выходного напряжения поля Efd. TE - постоянная времени для этого процесса.
[1] Рекомендуемая практика IEEE для моделей систем возбуждения для исследований устойчивости энергосистемы. IEEE Std 421.5-2016. Piscataway, NJ: IEEE-SA, 2016.
