Дискретный или непрерывный фильтр нижних частот
Simscape / Электрический / Контроль / Общий Контроль
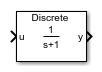
Блок фильтра нижних частот (дискретный или непрерывный) реализует фильтр нижних частот в соответствии с IEEE 421,5-2016 [1]. В стандарте фильтр называется простой постоянной времени.
С помощью параметра Sample time можно переключаться между непрерывной и дискретной реализациями интегратора.
Чтобы настроить фильтр на непрерывное время, установите для свойства Sample time значение 0. Это представление эквивалентно функции непрерывной передачи:
+ 1,
где:
K - коэффициент усиления фильтра.
T - постоянная времени фильтра.
Из предшествующей передаточной функции фильтром, определяющим уравнения, являются:
0) = x (0) = Ku0,
где:
u - вход фильтра.
x - состояние фильтра.
y - выходной сигнал фильтра.
t - время моделирования.
u0 - начальный вход в блок.
Чтобы настроить фильтр на дискретное время, установите для свойства Sample time положительное, ненулевое значение или значение -1 для наследования времени выборки из восходящего блока. Дискретное представление эквивалентно передаточной функции:
Ts/T − 1) z − 1,
где:
K - коэффициент усиления фильтра.
T - постоянная времени фильтра.
Ts - время выборки фильтра.
Из дискретной передаточной функции уравнения фильтра определяются методом Эйлера:
n) y (0) = x (0) = Ku0,
где:
u - входной сигнал фильтра.
x - состояние фильтра.
y - выходной сигнал фильтра.
n - временной шаг моделирования.
u0 - начальный вход в блок.
Чтобы задать начальные условия этого блока, задайте для параметра «Инициализация» значение:
Inherited from block input - Блок устанавливает начальные условия состояния и выхода на начальный вход.
Specify as parameter - блок устанавливает начальное условие состояния в значение начального состояния.
Установите параметры Верхний предел насыщения и Нижний предел насыщения, чтобы использовать метод предотвращения насыщения.
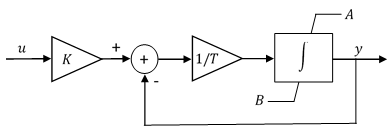
Способ защиты от намотки ограничивает состояние интегратора между нижним пределом А насыщения и верхним пределом В насыщения:
= B.
Поскольку состояние ограничено, выход может немедленно реагировать на обращение входного знака, когда интеграл насыщен. Эта блок-схема иллюстрирует реализацию способа защиты от насыщения ветром в фильтре.
Этот блок не обеспечивает метод насыщения ветвей. Чтобы использовать метод насыщения ветвей, задайте для параметра Верхний предел насыщения значение inf, параметр Нижний предел насыщения для -infи присоедините к выходу блок насыщения.
Установите для постоянной времени значение, меньшее или равное времени выборки, чтобы игнорировать динамику фильтра. При обходе блок подает масштабированный по коэффициенту усиления входной сигнал непосредственно на выходной сигнал:
В непрерывном случае время выборки и постоянная времени должны быть равны нулю.
[1] Рекомендуемая практика IEEE для моделей систем возбуждения для исследований устойчивости энергосистемы. IEEE Std 421.5-2016. Piscataway, NJ: IEEE-SA, 2016.



