Траектория ППМ в геодезических координатах
geoTrajectory Система object™ формирует траектории на основе ППМ в геодезических координатах. При создании объекта «Система» можно указать время прибытия, скорость и ориентацию для каждого ППМ. geoTrajectory Системный объект включает три системы координат. Дополнительные сведения см. в разделе Рамки координат в Geo Trajectory.
Для формирования траектории ППМ с центром Земли в геодезических координатах:
Создать geoTrajectory и задайте его свойства.
Вызовите объект, как если бы это была функция.
Дополнительные сведения о работе системных объектов см. в разделе Что такое системные объекты?.
trajectory = geoTrajectory(Waypoints,TimeOfArrival)geoTrajectory Системный объект, trajectory, на основании указанных геодезических ППМ, Waypointsи соответствующее время, TimeOfArrival.
trajectory = geoTrajectory(Waypoints,TimeOfArrival,Name,Value)Name к указанному Value. Неуказанные свойства и аргументы создания имеют значения по умолчанию или выводимые значения.
trajectory = geoTrajectory([10,10,1000;10,11,1100],[0,3600]) создает объект системы геодезических ППМ-траекторий, geojectory, который перемещается на один градус по долготе и на 100 метров по высоте за один час.Аргументы создания - это свойства, которые задаются во время создания объекта System и не могут быть изменены позже. Если явно значение аргумента создания не задано, значение свойства выводится.
Можно указать Waypoints и TimeOfArrival в качестве аргументов «только значение» или пар «имя-значение».
[ выводит кадр данных траектории на основе заданных аргументов и свойств создания, где positionLLA,orientation,velocity,acceleration,angularVelocity,ecef2ref] = trajectory()trajectory является geoTrajectory объект.
Чтобы использовать функцию объекта, укажите объект System в качестве первого входного аргумента. Например, для освобождения системных ресурсов объекта System с именем obj, используйте следующий синтаксис:
release(obj)
geoTrajectory и посмотрите на позуСоздать geoTrajectory с запуском ЛЛА при [15 15 0] и окончанием ЛЛА при [75 75 100]. Установите время полета равным десяти часам. Отбирать траекторию каждые 1000 секунд.
startLLA = [15 15 0];
endLLA = [75 75 100];
timeOfTravel = [0 3600*10];
sampleRate = 0.001;
trajectory = geoTrajectory([startLLA;endLLA],timeOfTravel,'SampleRate',sampleRate);Выведите ППМ LLA траектории.
positionsLLA = startLLA; while ~isDone(trajectory) positionsLLA = [positionsLLA;trajectory()]; end positionsLLA
positionsLLA = 37×3
15.0000 15.0000 0
16.6667 16.6667 2.7778
18.3333 18.3333 5.5556
20.0000 20.0000 8.3333
21.6667 21.6667 11.1111
23.3333 23.3333 13.8889
25.0000 25.0000 16.6667
26.6667 26.6667 19.4444
28.3333 28.3333 22.2222
30.0000 30.0000 25.0000
⋮
Найдите декартовы ППМ траектории в кадре ECEF с помощью lookupPose функция.
sampleTimes = 0:1000:3600*10;
n = length(sampleTimes);
positionsCart = lookupPose(trajectory,sampleTimes,'ECEF');Визуализация результатов в кадре ECEF.
figure() km = 1000; plot3(positionsCart(1,1)/km,positionsCart(1,2)/km,positionsCart(1,3)/km, 'b*'); hold on; plot3(positionsCart(end,1)/km,positionsCart(end,2)/km,positionsCart(end,3)/km, 'bo'); plot3(positionsCart(:,1)/km,positionsCart(:,2)/km,positionsCart(:,3)/km,'b'); plot3([0 positionsCart(1,1)]/km,[0 positionsCart(1,2)]/km,[0 positionsCart(1,3)]/km,'k:'); plot3([0 positionsCart(end,1)]/km,[0 positionsCart(end,2)]/km,[0 positionsCart(end,3)]/km,'k:'); xlabel('x (km)'); ylabel('y (km)'); zlabel('z (km)'); legend('Start position','End position', 'Trajectory')

geoTrajectory Системный объект включает три рамки координат:
Каркас ECEF (Земля-Центр-Земля-Фиксированная)
Локальная опорная система: локальная рамка NED (север-восток-вниз) или RUS (восток-север-вверх)
Рамка корпуса мишени
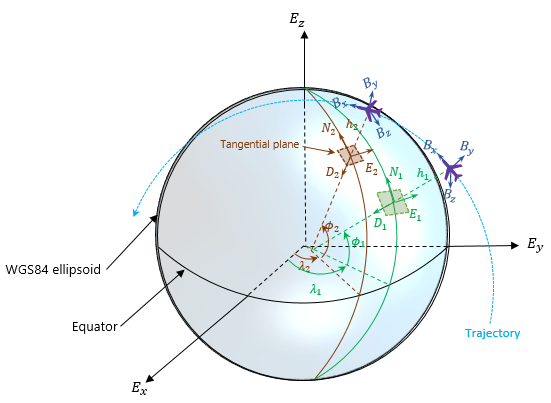
На рисунке показана траектория в центре Земли с двумя выделенными ППМ. На рисунках в качестве примера используется локальная опорная система NED, но можно использовать локальную опорную систему ENU. На рисунке
Ex, Ey и Ez - три оси кадра ECEF, который закреплен на Земле.
Bx, By и Bz - три оси рамы тела цели, которая закреплена на цели.
N, E и D - три оси локального кадра NED. На рисунке показаны два локальных опорных кадра NED: N1-E1-D1 и N2-E2-D2. Происхождение каждой местной структуры NED - Земной пункт поверхности, соответствующий траектории waypoint на основе эллиптической модели WGS84. Горизонтальная плоскость местной структуры NED - тангенс на эллиптическую поверхность модели WGS84.
λ и λ - геодезическая долгота и широта соответственно. Ориентация цели с использованием соглашения о локальном кадре NED определяется как поворот от локального кадра NED к корпусу цели, например поворот от N1-E1-D1 к Bx-By-Bz.