Моделирование прибылей и потерь радаров и оценка производительности в различных средах
Приложение Radar Designer - это интерактивный инструмент, который помогает инженерам и системным аналитикам в проектировании и оценке радиолокационных систем высокого уровня на ранней стадии разработки радаров. С помощью приложения можно:
Оценка и сравнение нескольких конструкций радаров в одном сеансе
Добавьте интеллектуальный радар, среду и целевые конфигурации конструктора радаров, чтобы запустить анализ
Учет экологических последствий, обусловленных кривизной Земли, атмосферой, рельефом местности и осадками
Добавление пользовательских сечений РЛС цели, моделей антенн/решеток, а также не зависящих от дальности и зависящих от дальности потерь
Экспорт и сохранение результатов, сессий, моделей и графиков для продолжения анализа
MATLAB ® Toolstrip: На вкладке «Приложения» в разделе «Обработка сигналов и связь» щелкните значок приложения.
командная строка MATLAB: Enter radarDesigner.
Спроектируйте радар для установки на грузовике. Отрегулируйте расчетные параметры, чтобы РЛС могла работать в туманных условиях и по-прежнему составляла целевой диапазон. Экспорт сессии конструирования в рабочую область MATLAB.
Откройте конструктор радаров. В командной строке введите
radarDesigner
Automotive Radar вариант. Приложение определяет типичный дизайн РЛС, параметры цели и среды.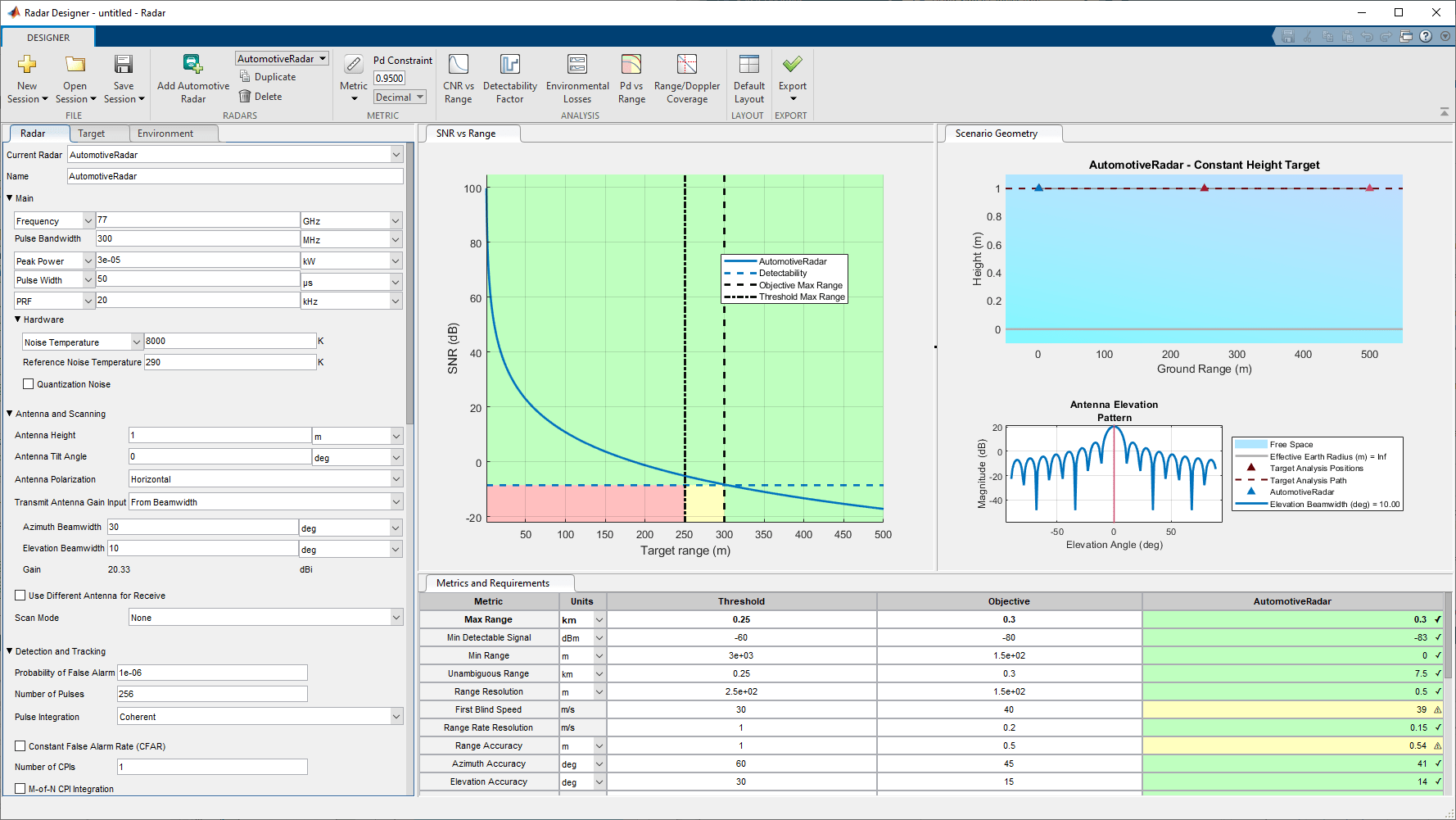
Проектируемый радар должен быть установлен на высоте 3 метра над землей. На Radar вкладка, в окне Antenna and Scanning измените высоту антенны с 1 метра на 3 метра.
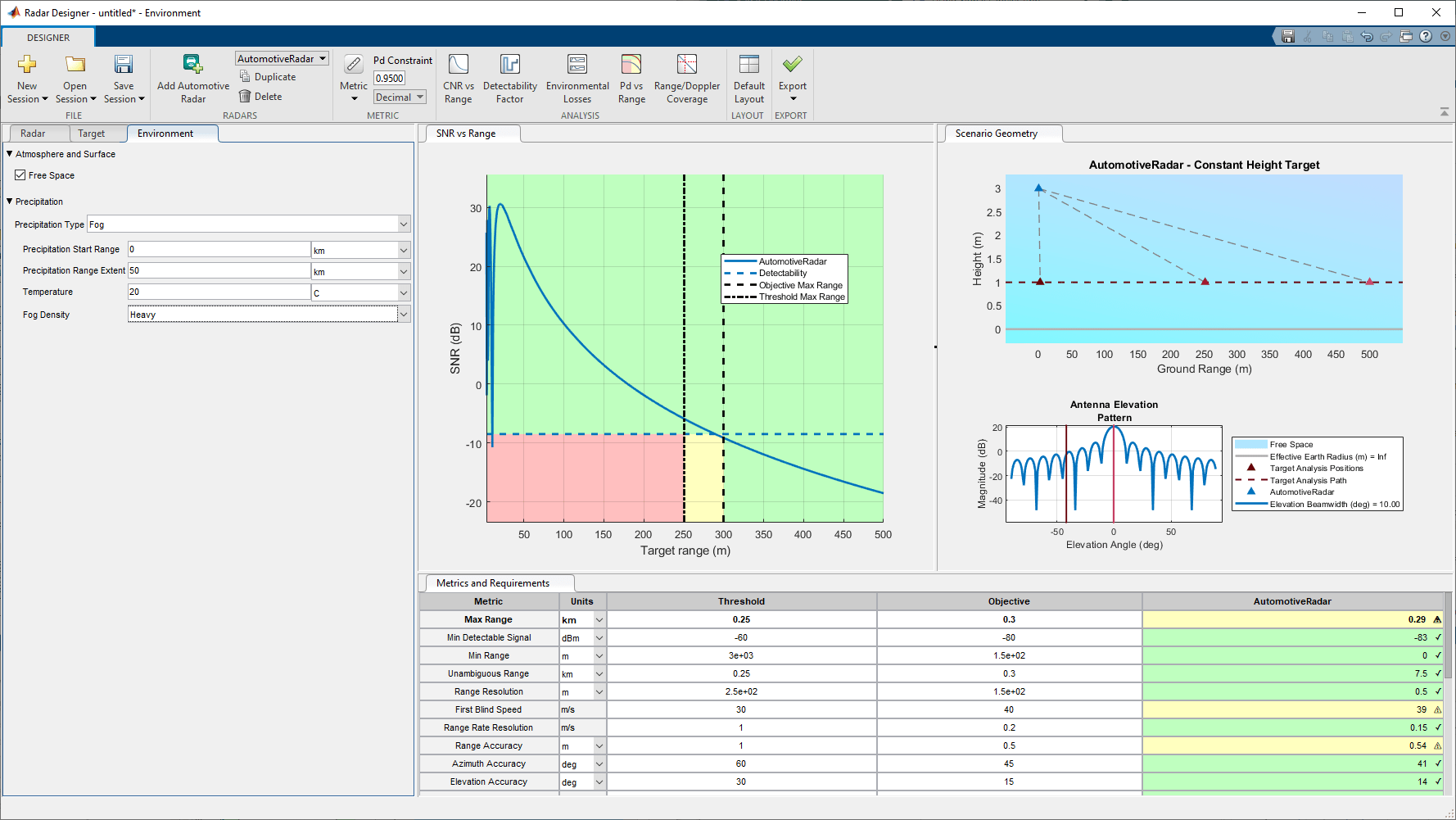
На Environment вкладка, в окне Precipitation , укажите тип осадка как Fog и задайте для параметра «Плотность тумана» значение Heavy.
В качестве SNR vs Range заговор и Metrics and Requirements в таблице показано, что радар удовлетворяет пороговому максимальному диапазону, но не соответствует требуемому максимальному диапазону 300 метров.
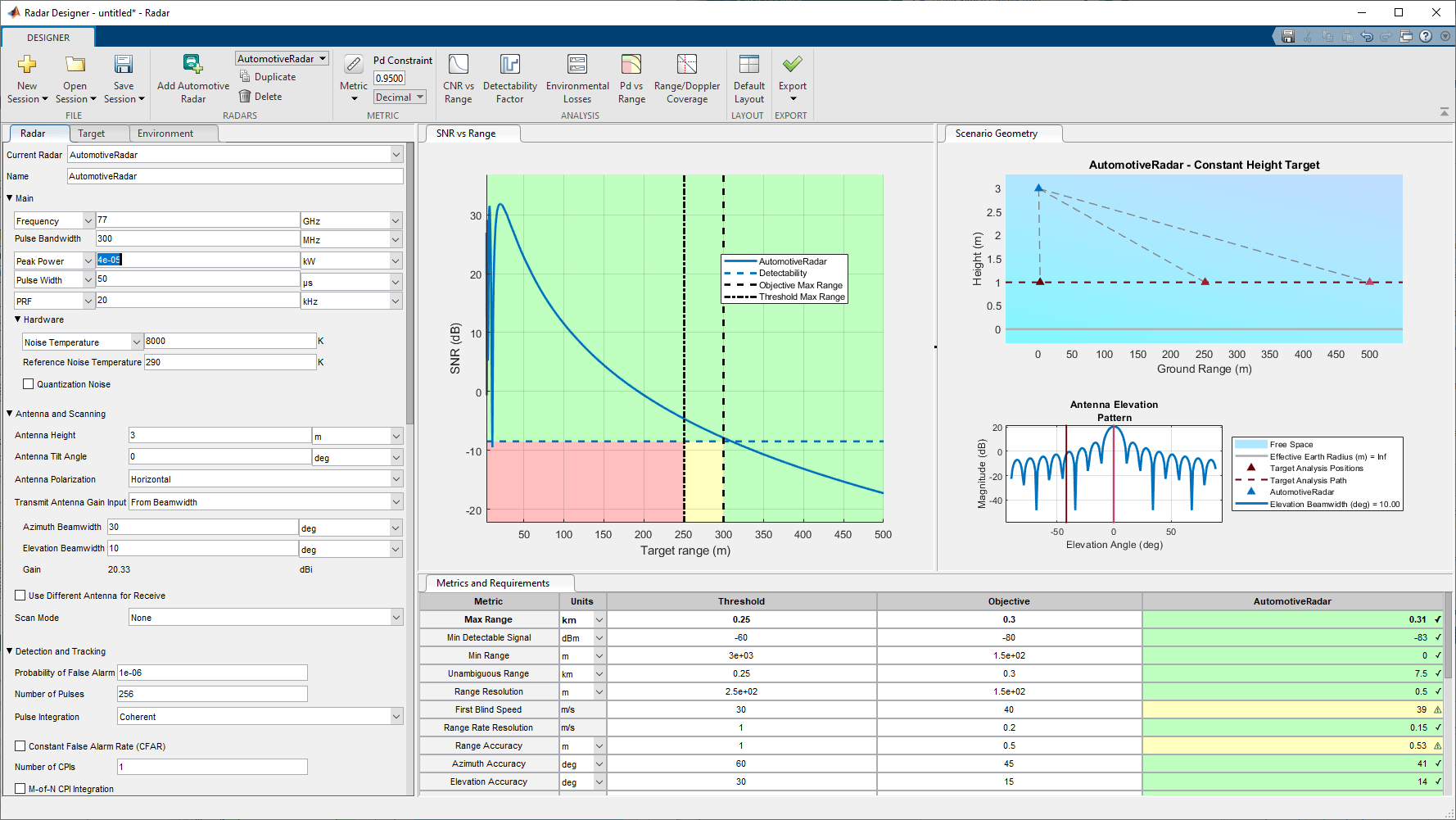
Увеличение передаваемой мощности для достижения более высокого максимального диапазона. На Radar вкладка, в окне Main сечение, увеличить Peak Power кому 4e-05
kW. График и таблица показывают, что радар удовлетворяет требованию с новым значением мощности.
Экспорт конструкции радара в рабочее пространство MATLAB. На панели инструментов нажмите кнопку «Экспорт» и выберите Generate Metrics Report для создания форматированного отчета о числовых метриках.
Radar - Расчетные параметрыЧтобы включить параметры радара, щелкните Новый сеанс на панели инструментов приложения, чтобы загрузить одну из встроенных конфигураций конструктора радаров. Используйте раздел «Радары» инструментальной полосы приложения, чтобы добавлять, дублировать или удалять конструкции радаров во время сеанса.
Список Current Radar (Текущий радар) используется для переключения между различными конструкциями радаров в течение одного сеанса.
Используйте поле Имя (Name), чтобы изменить имя выбранного в данный момент радара.
Main - Настройки пульса и несущейЭти параметры используются для задания параметров импульса и несущей, таких как частота несущей и передаваемая мощность.
| Параметр | Описание |
|---|---|
Несущая волна Frequency (по умолчанию) или Wavelength | Несущая частота или длина волны несущей, заданная как скаляр.
|
| Полоса пропускания импульсов | Полоса пропускания передаваемого импульса, заданная как скаляр в Hz, kHz, MHz, или GHz. |
Average Power (по умолчанию) или Peak Power | Средняя передаваемая мощность или пиковая передаваемая мощность, заданная как скаляр.
|
Pulse Width (по умолчанию) или Duty Cycle | Длительность импульса РЛС или рабочий цикл РЛС, определяемый как скаляр.
|
PRF (по умолчанию) или PRI | Частота повторения импульсов (PRF) или интервал повторения импульсов (PRI), заданный как скаляр.
|
Hardware - Настройки шумаЭти параметры используются для задания параметров шума, таких как температура шума или динамический диапазон.
| Параметр | Описание |
|---|---|
Noise Temperature или Noise Figure | Температура шума системы или показатель шума, указанный как скаляр.
|
| Эталонная температура шума | Эталонная температура шума, заданная как скаляр в К. |
| Шум квантования | Выберите «Шум квантования» для включения шума квантования. |
| Количество битов | Число битов в аналого-цифровом (АЦП) преобразователе, указанное как безразмерный скаляр. Этот параметр применяется только в том случае, если выбран параметр «Шум квантования». |
| Динамический диапазон | Динамический диапазон аналого-цифрового преобразователя, заданный как скаляр в Этот параметр применяется только в том случае, если выбран параметр «Шум квантования». |
Antenna and Scanning - Настройки положения, ширины луча и коэффициента усиленияЭти параметры используются для задания параметров положения, ширины луча и коэффициента усиления, таких как высота антенны, поляризация антенны или ширина луча азимута.
| Параметр | Описание |
|---|---|
| Высота антенны | Высота антенны над поверхностью, заданная как скаляр в Этот параметр применяется как к передающей антенне, так и к приемной антенне. |
| Угол наклона антенны | Угол между электрической осью антенны и плоскостью земли, заданный как скаляр в Этот параметр применяется как к передающей антенне, так и к приемной антенне. |
| Поляризация антенны | Укажите поляризацию антенны как Этот параметр применяется как к передающей антенне, так и к приемной антенне. |
Transmit Antenna Gain Input - Усиление передающей антенныЗадайте входной сигнал усиления передающей антенны как один из следующих параметров:
Manual - Поле «Коэффициент усиления» используется для ввода пользовательского значения для передающей антенны в dBi.
From Beamwidth - Вычислять коэффициент усиления передающей антенны по ширине луча, предполагая идеальную гауссову диаграмму направленности без боковых лопастей. Эти параметры можно задать.
| Параметр | Описание |
|---|---|
| Азимутальная ширина луча | Азимутальная ширина луча передающей антенны, заданная как скаляр в deg, rad, или mrad. |
| Ширина луча отметки | Ширина луча возвышения передающей антенны, заданная как скаляр в deg, rad, или mrad. |
Radar Designer вычисляет и отображает коэффициент усиления приемной антенны в dBi.
Receive Antenna Gain Input - Коэффициент усиления приемной антенны, если он отличается от коэффициента усиления передающей антенныВыберите Use Different Antenna for Receive, чтобы указать, что приемная и передающая антенны имеют разные коэффициенты усиления. Если для приема используется другая антенна, можно указать один из следующих параметров:
Manual - Используйте поле «Усиление» для ввода пользовательского значения для приемной антенны в dBi.
From Beamwidth - Вычислять коэффициент усиления приемной антенны по ширине луча, предполагая идеальную гауссову диаграмму направленности без боковых лопастей. Эти параметры можно задать.
| Параметр | Описание |
|---|---|
| Азимутальная ширина луча | Азимутальная ширина луча приемной антенны, заданная как скаляр в deg, rad, или mrad. |
| Ширина луча отметки | Ширина луча возвышения приемной антенны, заданная как скаляр в deg, rad, или mrad. |
Radar Designer вычисляет и отображает коэффициент усиления приемной антенны в dBi.
Scan Mode - Настройки режима сканированияУкажите один из следующих режимов сканирования:
None - РЛС не выполняет сканирование. Radar Designer не включает связанные с сканированием потери в анализ.
Mechanical - РЛС выполняет механическое сканирование. Radar Designer включает в анализ потери формы луча и коэффициент задержки луча (зависящие от дальности потери для быстро сканирующего луча).
Electronic - Радар использует фазированную решетку для выполнения электронного сканирования. Radar Designer включает в анализ потери формы луча и потери сектора сканирования.
Если выбран режим сканирования Mechanical или Electronic, можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Размер сектора сканирования азимута | Азимутальный диапазон объема поиска, указанный как скаляр в deg, rad, или mrad. |
| Пределы сканирования отметок | Начальная и окончательная отметки тома сканирования, указанные как два скаляра в deg, rad, или mrad. |
На основе выбранных параметров Radar Designer вычисляет и отображает следующие настройки:
Максимальная скорость сканирования, максимальная скорость сканирования в градусах в секунду при выбранном PRF, количество передаваемых импульсов и ширина луча антенны. Этот параметр отображается, если выбран режим сканирования Mechanical.
Размер объема поиска (Search Volume Size) - размер объемного углового объема поиска в стерадианах.
Время поиска (Search Time) - время в секундах, необходимое для сканирования объема поиска с учетом выбранного PRF, количества передаваемых импульсов и ширины луча антенны.
Detection and Tracking - настройки Pfa, CPI и M-of-NЭти параметры используются для задания параметров Pfa, CPI и M-of-N, таких как вероятность ложного аварийного сигнала или логический порог подтверждения дорожки.
| Параметр | Описание |
|---|---|
| Вероятность ложной тревоги | Желаемая вероятность ложной тревоги (Pfa) на выходе детектора, заданная как безразмерный скаляр. Значение по умолчанию - 10-6 ( |
| Количество импульсов | Число импульсов в пределах интервала когерентной обработки (CPI), определяемое как положительный целочисленный скаляр. |
| Интеграция импульсов | Интеграция импульсов, указанная как |
Moving Target Indicator (MTI) - Индикатор движущейся целиВыберите Moving Target Indicator (MTI), чтобы включить обработку Moving Target Indicator в проект. Если включена обработка индикатора движущейся цели, можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Компенсатор | Отменщик, указанный как один из следующих:
|
| Нулевая скорость | Скорость беспорядка, на которую настраивается фильтр MTI, заданная как скаляр в m/s, km/hr, mi/hr, или kts. |
| Метод | Способ выполнения обработки MTI, указанный как один из следующих:
|
| Квадратурная обработка | Выберите Квадратурная обработка (Quarrature Processing), чтобы включить обработку квадратурного канала (вектора) MTI для вашей конструкции. Если этот параметр не выбран, Radar Designer выполняет одноканальную обработку MTI. |
Эта опция доступна, если для параметра Pulse Integration установлено значение Noncoherent.
Binary Pulse Integration - Интеграция двоичных импульсовУкажите способ выполнения интеграции двоичных импульсов (M-of-N):
None - Radar Designer не применяет двоичную интеграцию.
Automatic - Radar Designer применяет двоичную интеграцию и вычисляет оптимальное количество обнаруженных импульсов (М) из общего числа импульсов (N).
Custom - Radar Designer применяет двоичную интеграцию с указанным вручную количеством обнаруженных импульсов. Если выбрана эта опция, укажите число обнаруженных импульсов (M) из общего числа импульсов (N) как положительное целое число.
Эта опция доступна, если для параметра Pulse Integration установлено значение Noncoherent.
Constant False Alarm Rate (CFAR) - Включить постоянное ложное обнаружение частоты аварийных сигналовВыберите Constant False Alarm Rate (CFAR) (постоянная частота ложных аварийных сигналов), чтобы включить обнаружение постоянной частоты ложных аварийных сигналов (CFAR). Если включено обнаружение CFAR, можно установить эти параметры.
| Параметр | Описание |
|---|---|
| Количество опорных ячеек | Общее количество опорных (обучающих) ячеек CFAR, указанное как положительный целочисленный скаляр. |
| Метод | Метод обнаружения CFAR, указанный как один из следующих:
|
Number of CPIs - Количество интервалов когерентной обработкиУкажите количество интервалов когерентной обработки (CPI) как положительный целочисленный скаляр.
M-of-N CPI Integration - Включение интеграции M-of-N ИПЦВыберите M-of-N CPI Integration (Интеграция CPI M-of-N), чтобы включить интеграцию M-of-N интервалов когерентной обработки (CPI). Если включить интеграцию M-of-N CPI, можно задать этот параметр.
| Параметр | Описание |
|---|---|
| Количество CPI с обнаружением | Количество интервалов когерентной обработки с объявленным обнаружением (М) из общего числа CPI (N), указанных как безразмерный скаляр. |
Sensitivity Time Control (STC) - Контроль времени чувствительностиВыберите Управление временем чувствительности (Sensitivity Time Control), чтобы включить управление временем чувствительности в проекте. Если включен контроль времени чувствительности, можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Диапазон отсечения | Диапазон отсечения, за которым используется полный коэффициент усиления приемника, заданный как скаляр в m, km, nmi, ft, или kft. По умолчанию: 50 км. |
| Экспонента | Экспонента, выбранная для сохранения возможности обнаружения цели для диапазонов внутри диапазона отсечения. По умолчанию: 3.5. |
Track Confirmation Logic - Вероятность подтверждения отслеживанияДля вычисления вероятностей подтверждения отслеживания используется алгоритм истории общих переходов. Эти параметры можно задать.
| Параметр | Описание |
|---|---|
| Порог подтверждения | Порог подтверждения, заданный как два положительных целых скаляра, которые представляют логику подтверждения M-of-N или M/N. По умолчанию: 2/3. |
Update Rate или Update Time | Частота или время обновления:
По умолчанию: 1 Гц или 1 с. |
Loss Factors - Коэффициенты потерьЭти параметры используются для определения коэффициентов потерь.
| Параметр | Описание |
|---|---|
| Затмение | Потеря затмения, указанная как None (по умолчанию), Range-Dependent Factor, или Statistical Loss. |
| Пользовательские потери | Пользовательская потеря, указанная как скаляр в dB или linear единиц. По умолчанию: 4 дБ. |
Target - Целевые характеристикиЧтобы включить параметры цели, добавьте в приложение хотя бы один радар.
| Параметр | Описание |
|---|---|
| Сечение радара | Сечение радара, указанное как скаляр в m2 или dBsm. |
| Модель сверлинга | Сверлинговая модель, указанная как Swerling 0/5, Swerling 1, Swerling 2, Swerling 3, или Swerling 4. |
Height или Elevation Angle | Высота или угол возвышения, заданный как скаляр.
|
| Максимальное ускорение | Максимальное ускорение, указанное как скаляр в m2 или в единицах g. |
Environment - Ландшафт и осадкиВкладка Окружающая среда (Environment) используется для включения эффектов, обусловленных кривизной Земли, атмосферой, рельефом местности и осадками.
Atmosphere and Surface - Характеристики атмосферы и поверхностиУкажите характеристики атмосферы и поверхности, чтобы использовать сезонные модели широты, параметры поверхности и поверхностного загромождения.
По умолчанию. Для конструктора радаров выбран параметр «Свободное пространство». Эта опция соответствует распространению в вакууме, и единственной переменной, которой можно управлять, является Precipitation. Чтобы получить доступ к другим параметрам, снимите флажок.
Earth Model - Модель ЗемлиУкажите модель земли как Curved или Flat. Использование кривой модели Земли дает доступ к большему количеству моделей атмосферы и позволяет управлять Effective Earth Radius.
Atmosphere Model - Тип атмосферыУказать тип атмосферы, через которую распространяется радиолокационный сигнал No Atmosphere, Uniform, Standard, Low Latitude, Mid Latitude, или High Latitude.
No Atmosphere - Нет атмосферыОпределить No Atmosphere для использования постоянного показателя преломления 1. Эта модель не включает потери атмосферного газа или потери эффекта линзы.
Uniform - Однородная атмосфераОпределить Uniform для атмосферы с однородной температурой, давлением и плотностью водяного пара. Эта модель может включать потери атмосферного газа, но не потери эффекта линзы. Эти параметры можно задать.
| Параметр | Описание |
|---|---|
| Температура окружающей среды | Температура однородной атмосферы, заданная как скаляр в C или K. Значение по умолчанию: 15 ° C. |
| Давление сухого воздуха | Давление сухого воздуха однородной атмосферы, указанное как скаляр в hPa, Pa, или mbar. По умолчанию: 1013 гПа. |
| Плотность водяного пара | Плотность водяного пара однородной атмосферы, указанная как скаляр в g/m3 или g/cm3. По умолчанию: 7,5 г/м3. |
| Включить потери атмосферных газов | Выберите, чтобы включить потери в тракте из-за поглощения газообразной атмосферы. |
Standard - Средняя ежегодная глобальная эталонная атмосфера МСЭУкажите стандарт для использования средней годовой глобальной эталонной атмосферы ITU (MAGRA), рекомендованной в ITU-R P.835-6 [1]. Эта опция применяется только в том случае, если модель земли указана как Curved. Эти параметры можно задать.
| Параметр | Описание |
|---|---|
| Профиль плотности водяного пара | Профиль плотности водяного пара, указанный как Automatic или Custom. Используйте этот параметр для использования настроек, рекомендованных в ITU-R P.835-6 или собственных настроек плотности водяного пара и высоты шкалы. |
| Поверхностная плотность водяного пара | Поверхностная плотность водяного пара, указанная как скаляр в Этот параметр применяется только в том случае, если профиль плотности водяного пара указан как |
| Высота шкалы | Высота масштаба, заданная как скаляр в Этот параметр применяется только в том случае, если профиль плотности водяного пара указан как |
| Включить потери атмосферных газов | Выберите, чтобы включить потери в тракте из-за поглощения газообразной атмосферы. |
| Включить потерю эффекта линзы | Выберите, чтобы включить потерю эффекта линзы из-за изменения показателя преломления в атмосфере. Этот эффект значителен только при небольших углах выпаса. |
Low Latitude - Модель атмосферы МСЭ для широт менее 22 градусовУкажите Low Latitude для использования модели атмосферы ITU для широт менее 22 °, рекомендованных в ITU-R P.835-6 [1]. Эта опция применяется только в том случае, если модель земли указана какCurved. Эти параметры можно задать.
| Параметр | Описание |
|---|---|
| Включить потери атмосферных газов | Выберите, чтобы включить потери в тракте из-за поглощения газообразной атмосферы. |
| Включить потерю эффекта линзы | Выберите, чтобы включить потерю эффекта линзы из-за изменения показателя преломления в атмосфере. Этот эффект значителен только при небольших углах выпаса. |
Mid Latitude - Модель атмосферы МСЭ для широт от 22 градусов до 45 градусовУкажите среднюю широту для использования модели атмосферы ITU для широт от 22 ° до 45 °, рекомендованных в ITU-R P.835-6 [1]. Эта опция применяется только в том случае, если модель земли указана какCurved. Эти параметры можно задать.
| Параметр | Описание |
|---|---|
| Сезон | Сезон, указанный как Summer или Winter. |
| Включить потери атмосферных газов | Выберите, чтобы включить потери в тракте из-за поглощения газообразной атмосферы. |
| Включить потерю эффекта линзы | Выберите, чтобы включить потерю эффекта линзы из-за изменения показателя преломления в атмосфере. Этот эффект значителен только при небольших углах выпаса. |
High Latitude - Модель атмосферы МСЭ для широт более 45 градусовУкажите высокую широту для использования модели атмосферы ITU для широт выше 45 °, рекомендованных в ITU-R P.835-6 [1]. Эта опция применяется только в том случае, если модель земли указана какCurved. Эти параметры можно задать.
| Параметр | Описание |
|---|---|
| Сезон | Сезон, указанный как Summer или Winter. |
| Включить потери атмосферных газов | Выберите, чтобы включить потери в тракте из-за поглощения газообразной атмосферы. |
| Включить потерю эффекта линзы | Выберите, чтобы включить потерю эффекта линзы из-за изменения показателя преломления в атмосфере. Этот эффект значителен только при небольших углах выпаса. |
Effective Earth Radius - Эффективный радиус ЗемлиУкажите эффективный радиус земли как одно из следующих значений:
Automatic - Radar Designer вычисляет радиус автоматически на основе эталонной атмосферы.
| Модель атмосферы | Эффективный радиус Земли |
|---|---|
No Atmosphere | 6371 км |
Uniform | 6371 км |
Standard | 8719 км |
Low Latitude | 9540 км |
Mid Latitude | 8262 км |
High Latitude | 8308 км |
Custom - Этот вариант рекомендуется для высотных геометрий. Укажите эффективный радиус Земли как скаляр в m, km, nmi, ft, или kft. Этот параметр часто устанавливается равным 4/3 фактического радиуса Земли.
Surface Type - Тип поверхностиУкажите тип поверхности, на которой распространяется радиолокационный сигнал Featureless, Sea, Land, или Custom.
Featureless - Характеристики идеально гладкой, идеально отражающей поверхностиЕсли тип поверхности указан как Featureless, можно задать параметр Коэффициент распространения (Propagation Factor), который доступен только при установке Earth Model кому Curved. Коэффициент распространения равен off по умолчанию.
Sea - Характеристики моряЕсли тип поверхности указан как Sea, можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Номер морского государства | Номер морского государства, указанный как один из следующих:
|
| Включить коэффициент распространения радара | Коэффициент распространения РЛС представляет собой отношение величины фактического магнитного поля в точке пространства к величине магнитного поля в той же точке свободного пространства. Этот параметр доступен, только если для параметра Модель земли (Earth Model) задано значение |
| Модель диэлектрической проницаемости | Модель диэлектрической проницаемости, заданная как одна из следующих:
Этот параметр применяется только в том случае, если выбран параметр «Включить коэффициент распространения радара». |
Land - Характеристики землиЕсли тип поверхности указан как Sea, можно задать эти параметры.
| Тип земли | Тип земельного участка, указанный как один из следующих:
|
| Включить коэффициент распространения радара | Коэффициент распространения РЛС представляет собой отношение величины фактического магнитного поля в точке пространства к величине магнитного поля в той же точке свободного пространства. Этот параметр доступен, только если для параметра Модель земли (Earth Model) задано значение |
| Тип растительности | Тип растительности, указанный как один из следующих:
Этот параметр применяется только в том случае, если выбран параметр «Включить коэффициент распространения радара». |
| Модель диэлектрической проницаемости | Модель диэлектрической проницаемости, заданная как одна из следующих:
Этот параметр применяется только в том случае, если выбран параметр «Включить коэффициент распространения радара». |
Custom - Пользовательская поверхностьЕсли тип поверхности указан как Custom, можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Стандартное отклонение высоты | Стандартное отклонение высоты поверхности, указанное как скаляр в m, km, nmi, ft, или kft. |
| Включить коэффициент распространения радара | Коэффициент распространения РЛС представляет собой отношение величины фактического магнитного поля в точке пространства к величине магнитного поля в той же точке свободного пространства. Этот параметр доступен, только если для параметра Модель земли (Earth Model) задано значение |
| Наклон | Наклон поверхности, заданный как скаляр в Этот параметр применяется только в том случае, если выбран параметр «Включить коэффициент распространения радара». |
| Диэлектрическая постоянная | Поверхностная диэлектрическая проницаемость, заданная как скаляр с комплексными значениями в F/m. По умолчанию: (28.5 - j11.5) Ф/м. |
Свойства Custom
Тип поверхности не зависит от частоты.
Clutter Properties - Характеристики захламленияМожно задать эти свойства загромождения.
| Параметр | Описание |
|---|---|
| Гамма | Параметр поверхностной гамма (γ), заданный как скаляр в Значение γ для системы, работающей на частоте f, равно γ = γ 0 + 5 log10 (f/f0), где γ 0 - значение γ при f0 = 10 ГГц и определяется измерением. Этот параметр применяется только в том случае, если для параметра «Тип поверхности» задано значение |
| Спецификация скорости разгона | Скорость беспорядка, указанная как одно из следующих значений:
Этот параметр применяется только в том случае, если для параметра «Тип поверхности» задано значение |
| Поляризационная зависимость | Поляризационная зависимость, указанная как Этот параметр применяется только в том случае, если для параметра «Тип поверхности» задано значение |
| Скорость загромождения | Скорость беспорядка, заданная как скаляр в Этот параметр применяется, только если поляризационная зависимость указана как |
| H-pol Скорость нагромождения | Скорость беспорядка для горизонтальной поляризации, заданная как скаляр в Этот параметр применяется, только если поляризационная зависимость указана как |
| Скорость нагромождения V-pol | Скорость загромождения для вертикальной поляризации, заданная как скаляр в Этот параметр применяется, только если поляризационная зависимость указана как |
| Среднеквадратическое отклонение скорости беспорядка | Стандартное отклонение скорости беспорядка (разброс скорости беспорядка), указанное как скаляр в m/s, km/hr, mi/hr, или kts. |
Precipitation - Характеристики осадковУкажите тип осадка во время распространения радиолокационного сигнала как None, Rain, Snow, Fog, или Clouds для использования моделей дождя, снега, тумана и облака с настройками диапазона.
Rain - Характеристики дождяЕсли тип осадка указан как Rain, можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Модель | Модель дождя, заданная как одна из следующих:
|
| Начальный диапазон осадков | Начальный диапазон участка осаждения, указанный как скаляр в m, km, nmi, ft, или kft. |
| Диапазон осадков | Диапазон протяженности участка осаждения, указанный как положительный скаляр в m, km, nmi, ft, или kft. |
| Скорость дождя | Долгосрочная статистическая скорость дождя, указанная как скаляр в мм/ч. |
| Статистический процент | Статистический процент, указанный как безразмерный скаляр не менее 0,001 и не более 1. Этот параметр возвращает затухание для указанного процента времени и применяется только в том случае, если модель указана как ITU. |
Snow - Характеристики снегаЕсли тип осадка указан как Snow, можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Начальный диапазон осадков | Начальный диапазон участка осаждения, указанный как скаляр в m, km, nmi, ft, или kft. |
| Диапазон осадков | Диапазон протяженности участка осаждения, указанный как положительный скаляр в m, km, nmi, ft, или kft. |
| Скорость снега | Скорость снега, указанная как:
|
| Содержание жидкой воды | Содержание жидкой воды, указанное как скаляр в мм/ч. Этот параметр применяется только в том случае, если для параметра «Скорость снега» задано значение Custom. Умеренная скорость снега составляет от 1 мм/ч до 2,5 мм/ч. |
Radar Designer использует модель Gunn-East [3] для вычисления потерь снега.
Fog - Характеристики туманаЕсли тип осадка указан как Fog, можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Начальный диапазон осадков | Начальный диапазон участка осаждения, указанный как скаляр в m, km, nmi, ft, или kft. |
| Диапазон осадков | Диапазон протяженности участка осаждения, указанный как положительный скаляр в m, km, nmi, ft, или kft. |
| Температура | Температура окружающей среды тумана, указанная как скаляр в C или K. |
| Плотность тумана | Плотность противотуманной жидкой воды, указанная одна из следующих величин:
|
| Плотность жидкой воды | Плотность жидкой воды, заданная как скаляр в g/m3 или g/cm3. Этот параметр применяется только в том случае, если для параметра «Плотность тумана» задано значение Custom. |
Radar Designer использует модель тумана/облака ITU от ITU-R P.840-6. Модель не рекомендуется для распространения наклонного пути.
Clouds - Характеристики облакаЕсли тип осадка указан как Clouds, можно задать эти параметры.
| Параметр | Описание |
|---|---|
| Начальный диапазон осадков | Начальный диапазон участка осаждения, указанный как скаляр в m, km, nmi, ft, или kft. |
| Диапазон осадков | Диапазон протяженности участка осаждения, указанный как положительный скаляр в m, km, nmi, ft, или kft. |
| Тип облака | Тип облаков, указанный как один из следующих:
|
| Плотность жидкой воды | Плотность жидкой воды, заданная как скаляр в g/m3 или g/cm3. Этот параметр применяется только в том случае, если для параметра «Плотность тумана» задано значение Custom. |
Radar Designer использует модель тумана/облака ITU от ITU-R P.840-6. Модель не рекомендуется для распространения наклонного пути.
Metric - Решение и ограничение радиолокационного уравненияУкажите количество, для которого будет решаться уравнение РЛС, и количество, которое будет фиксироваться при решении.
Вероятность обнаружения
- вычислить![]() вероятность обнаружения (Pd) и другие метрики с ограничением максимального диапазона. Укажите максимальный диапазон как скаляр в
вероятность обнаружения (Pd) и другие метрики с ограничением максимального диапазона. Укажите максимальный диапазон как скаляр в m, km, nmi, ft, или kft.
Максимальный диапазон
- вычислить максимальный![]() диапазон и другие метрики с ограничением вероятности обнаружения (Pd). Укажите вероятность обнаружения в виде скаляра в десятичных единицах.
диапазон и другие метрики с ограничением вероятности обнаружения (Pd). Укажите вероятность обнаружения в виде скаляра в десятичных единицах.
Выбранное ограничение появляется в верхней части таблицы на вкладке Метрики и требования (Metrics and Requirements).
Metrics and Requirements - Ограничения конструкции РЛСИспользуйте вкладку Metrics and Requirements (Метрики и требования), чтобы скорректировать и изменить метрики, необходимые для анализа компромиссов, для получения требуемой производительности и удовлетворения требований к конструкции радара. Вкладка использует то же цветовое кодирование, что и диаграмма стоп-света, и показывает метрики в таблице.
| Метрика | Описание |
|---|---|
| Вероятность обнаружения | Вероятность обнаружения, заданная как безразмерный скаляр. Это первая запись в таблице, если вы указываете Учитывая максимальный диапазон Rmax, указанный в SNRav (Rmax) = Dx (Pd, Pfa, N, SW), где SNRav - отношение доступного сигнала к шуму, Dx - эффективный коэффициент обнаруживаемости, Pfa - выбранная вероятность ложного сигнала тревоги, N - количество принятых импульсов и SW - модель сигнала Сверлинга. |
| Макс. диапазон | Максимальный диапазон, указанный как скаляр в Учитывая требуемую вероятность обнаружения Pd, указанную в SNRav (Rmax) = Dx (Pd, Pfa, N, SW), где SNRav - отношение доступного сигнала к шуму, Dx - эффективный коэффициент обнаруживаемости, Pfa - выбранная вероятность ложного сигнала тревоги, N - количество принятых импульсов и SW - модель сигнала Сверлинга. |
| Минимальный обнаруживаемый сигнал | Минимальный обнаруживаемый сигнал, указанный как скаляр в Минимальный обнаруживаемый сигнал вычисляется с использованием MDS = kTsBDx, где k - постоянная Больцмана, Ts - температура шума системы, B - полоса пропускания, а Dx - коэффициент обнаруживаемости. |
| Минимальный диапазон | Минимальный диапазон, указанный как скаляр в Минимальный диапазон вычисляется с помощью Rmin = cstart/2, где c - скорость светового излучения, |
| Однозначный диапазон | Однозначный диапазон, заданный как скаляр в Однозначный диапазон вычисляется с помощью Rua = c × PRI/2 = c/( 2 × PRF), где c - скорость света, PRI - интервал повторения импульсов, PRF - частота повторения импульсов. |
| Разрешение диапазона | Разрешение диапазона, указанное как скаляр в Разрешение диапазона вычисляется с помощью δR = c/( 2 × B), где c - скорость света, а B - ширина полосы частот импульсов. |
| Первая слепая скорость | Первая слепая скорость, заданная как скаляр в м/с. Максимальная однозначная радиальная скорость (однозначный доплеровский) вычисляется с помощью Vrmax = λ × PRF/4, где λ - длина волны радара, а PRF - частота повторения импульсов. |
| Разрешение скорости диапазона | Разрешение скорости диапазона, указанное как скаляр в м/с. Разрешение скорости диапазона вычисляется с помощью δVr = λ × PRF/( 2N), где λ - длина волны радара, PRF - частота повторения импульсов, а N - количество принятых импульсов. |
| Точность диапазона | Точность диапазона, заданная как скаляр в Точность диапазона для импульса с линейной частотной модуляцией (LFM) вычисляется с использованием B2 + br2, где c - скорость света, SNR - доступное отношение сигнал/шум, B - ширина полосы импульсов, br2 - смещение диапазона. |
| Точность по азимуту | Точность по азимуту, заданная как скаляр в Точность по азимуту для M-элементной однородной линейной матрицы (ULA) вычисляется с использованием Mk2 + bstart2, где starte - азимутальная ширина луча, SNR - доступное отношение сигнал/шум, k - коэффициент ширины луча (k = 0,89 для ULA), и bstart- азимутальное смещение. |
| Точность отметки | Точность отметки, заданная как скаляр в Точность отметки для М-элементной однородной линейной матрицы (ULA) вычисляется с использованием Mk2 + bstart2, где starte - ширина луча на возвышении, SNR - доступное отношение сигнал/шум, k - коэффициент ширины луча (k = 0,89 для ULA), и bλ - смещение на возвышении. |
| Точность скорости диапазона | Точность скорости диапазона, заданная как скаляр в м/с. Точность скорости диапазона для N импульсов, когерентно обработанных в течение интервала когерентной обработки, вычисляется с использованием 4N3 + brr2, где PRF - частота повторения импульсов, λ - длина волны радара, SNR - доступное отношение сигнал/шум, B - ширина полосы частот импульсов, brr - смещение скорости диапазона. |
| Вероятность истинного пути | Вероятность истинной дорожки, заданная как безразмерный скаляр. Вероятность истинной дорожки вычисляется с использованием общего алгоритма предыстории затвора. Дополнительные сведения см. в разделе |
| Вероятность ложного отслеживания | Вероятность ложной дорожки, заданная как безразмерный скаляр. Вероятность ложной дорожки вычисляется с использованием общего алгоритма предыстории затвора. Дополнительные сведения см. в разделе |
| Эффективная изотропная излучаемая мощность | Эффективная изотропная излучаемая мощность, заданная как скаляр в Эффективная излучаемая мощность вычисляется с помощью ERP = PtGtx, где Pt - пиковая передаваемая мощность, а Gtx - коэффициент усиления антенны передатчика. |
| Продукт с апертурой питания | Произведение «мощность-апертура», указанное как скаляр в |
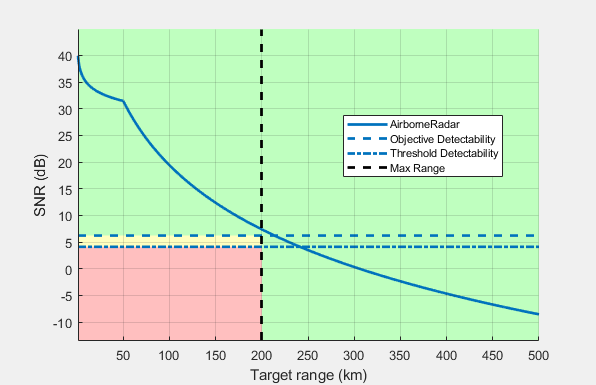
SNR vs Range - Доступная визуализация отношения сигнал/шумДля каждого сеанса проектирования РЛС Radar Designer отображает доступное отношение сигнал/шум (SNR) на входе приемника как функцию целевого диапазона. На графике показаны требования к максимальному диапазону и диаграмма стоп-света, основанная на значениях коэффициента обнаруживаемости (требуемого SNR).
На этом графике показан график отношения сигнал/шум для одного бортового радиолокатора с настройками по умолчанию. Дополнительные сведения см. в разделе Конфигурации конструктора радаров.
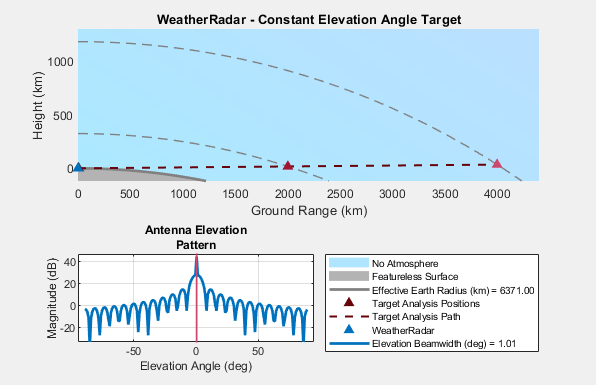
Scenario Geometry - Геометрическая визуализация и визуализация окружающей средыДля каждого сеанса конструирования радаров конструктор радаров отображает вкладку «Геометрия сценария», на которой отображается следующая информация:
Окружающая среда (искривленная Земля, плоская Земля, свободное пространство)
Высота радиолокационной антенны
Высота и положение цели в различных диапазонах (постоянная отметка или постоянная высота)
Радиолокационная антенная диаграмма, демонстрирующая примененный угол наклона
На этом графике показан график геометрии сценария для одного погодного радара с настройками по умолчанию на искривленной Земле. Дополнительные сведения см. в разделе Конфигурации конструктора радаров.
Analysis - Диапазон/доплеровский, обнаруживаемость и другие графикиУкажите графики для визуализации и анализа конструкции радара.
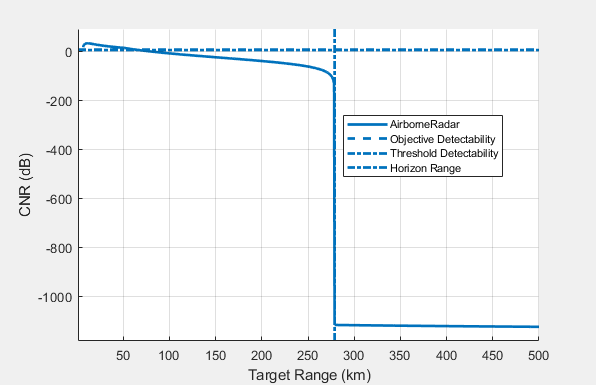
CNR vs Range
- Просмотр![]() отношения «беспорядок к шуму» по сравнению с диапазоном для всех конструкций
отношения «беспорядок к шуму» по сравнению с диапазоном для всех конструкций
Чтобы визуализировать отношение беспорядка к шуму (CNR) как функцию дальности для ваших конструкций радаров, щелкните CNR vs Range на панели инструментов.
Radar Designer отображает CNR в дБ и диапазон горизонта.
На этом графике показан график отношения загромождений к шуму для одного бортового радиолокатора с настройками по умолчанию. Дополнительные сведения см. в разделе Конфигурации конструктора радаров.
Коэффициент обнаруживаемости
- Проверка прибылей![]() и потерь выбранного в настоящее время радара
и потерь выбранного в настоящее время радара
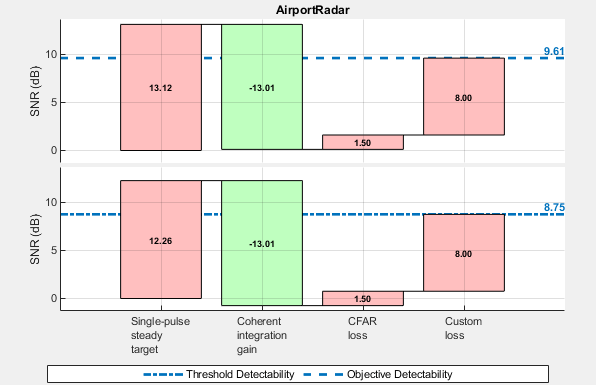
Чтобы визуализировать выигрыши и потери при проектировании радаров, щелкните «Коэффициент обнаруживаемости» на панели инструментов.
Radar Designer моделирует несколько компонентов цепочки обработки радиолокационных сигналов, которые влияют на результирующий коэффициент обнаруживаемости. Приложение отображает диаграмму водопада, которая показывает индивидуальные потери и выигрыши, которые способствуют увеличению требуемой энергии сигнала.
Потери, представленные красным цветом, увеличивают требуемый порог SNR.
Коэффициенты усиления, представленные зеленым цветом, уменьшают требуемое пороговое значение SNR.
Отсканируйте график слева направо, чтобы увидеть, как изменяется коэффициент обнаруживаемости при добавлении следующих компонентов:
Устойчиво-целевая одноимпульсная обнаруживаемость
Выигрыш от интеграции
Флуктуационные потери
Потеря двоичной интеграции
Потеря CFAR
Затмительная потеря
Потеря MTI
Потеря формы балки
Потеря сектора сканирования
На этом графике показан график коэффициента обнаруживаемости для одного радара аэропорта с настройками по умолчанию. Дополнительные сведения см. в разделе Конфигурации конструктора радаров.
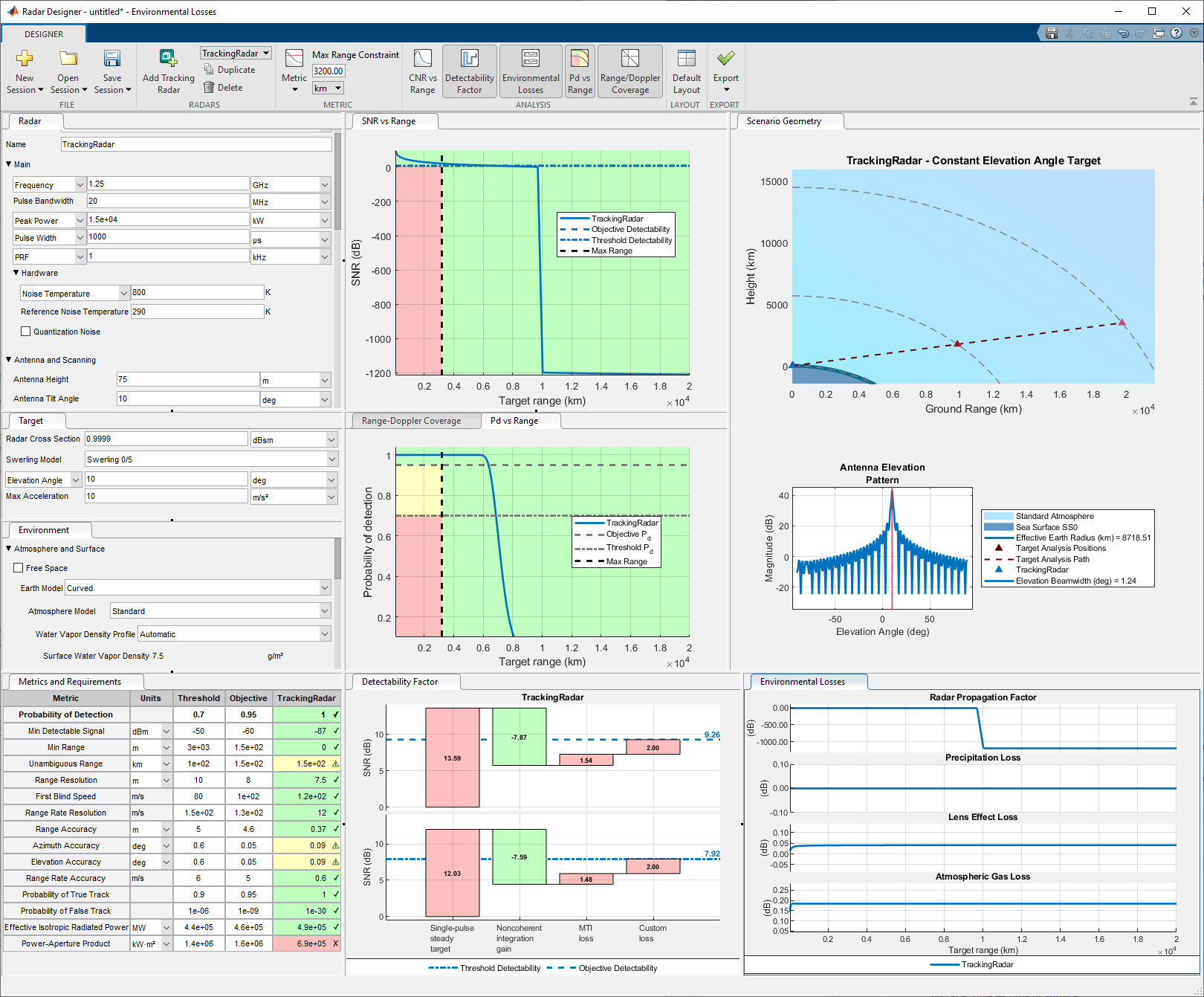
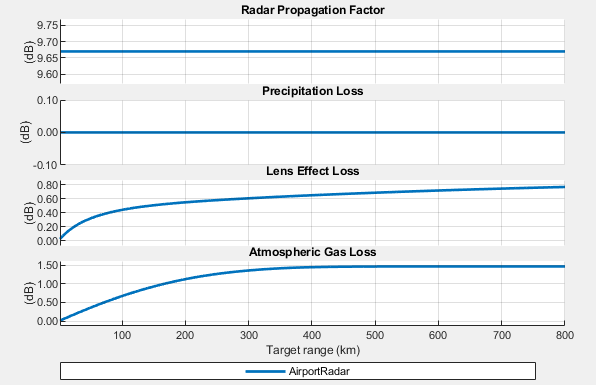
Экологические потери
- просмотр![]() экологических потерь для выбранного в настоящее время радара
экологических потерь для выбранного в настоящее время радара
Чтобы визуализировать зависящие от дальности компоненты потерь при проектировании радаров в рабочих средах, нажмите кнопку «Экологические потери» на панели инструментов.
Radar Designer отображает четыре зависимых от дальности компонента потерь, которые соответствуют различным атмосферным эффектам и эффектам распространения:
Потеря осадков
Потери атмосферного газа
Потеря линзового эффекта
Коэффициент распространения РЛС
На этом графике показан график экологических потерь для одного радара аэропорта с настройками по умолчанию с использованием модели атмосферы высокой широты. Дополнительные сведения см. в разделе Конфигурации конструктора радаров.
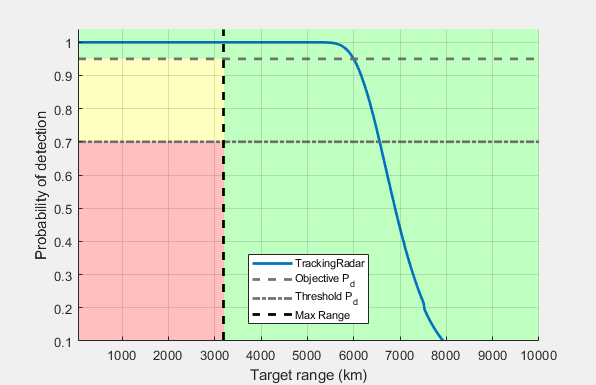
Pd vs Range
- показать вероятность![]() обнаружения (Pd) в зависимости от диапазона для всех конструкций
обнаружения (Pd) в зависимости от диапазона для всех конструкций
Чтобы визуализировать вероятность обнаружения в зависимости от дальности для проекта радара, щелкните Pd vs Range на панели инструментов.
Radar Designer отображает вероятность обнаружения на выходе приемника (эффективный Pd) в зависимости от дальности цели. На графике показаны требования к максимальному диапазону и диаграмма стоп-света на основе требуемых значений Pd.
На этом графике показан график зависимости вероятности обнаружения от дальности для одного трекингового радиолокатора с настройками по умолчанию. Дополнительные сведения см. в разделе Конфигурации конструктора радаров.
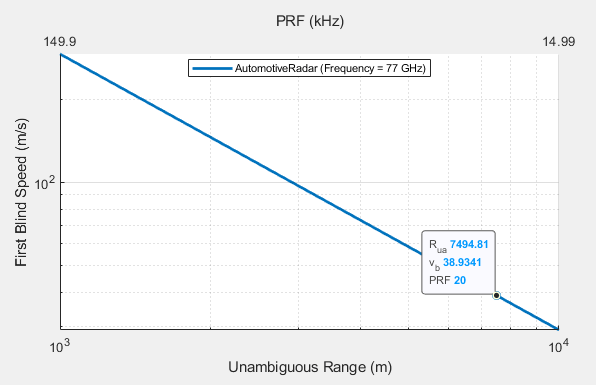
Диапазон/доплеровский охват
- Исследуйте![]() диапазон/доплеровское пространство для выбранного в настоящее время радара
диапазон/доплеровское пространство для выбранного в настоящее время радара
Чтобы визуализировать области без неоднозначности диапазона/доплеровского покрытия для ваших конструкций радаров, щелкните Диапазон/доплеровский охват (Range/Doppler Coverage) на инструментальной полосе.
Radar Designer отображает логарифмический график первой слепой скорости как функцию однозначного диапазона (нижняя ось x) и PRF (верхняя ось x). Каждая сплошная линия на графике представляет собой радиолокационную конструкцию. Конструкции с различными несущими частотами отображаются как параллельные линии.
На этом графике показан график диапазона/доплеровского покрытия для одного автомобильного радара с настройками по умолчанию. Дополнительные сведения см. в разделе Конфигурации конструктора радаров.
Radar Designer включает конфигурации радаров, позволяющие переключаться между конструкциями радаров, дублировать радары и удалять радары.
В этой таблице приведены значения параметров по умолчанию для встроенных конфигураций.
| Категория | Собственность | Радар | ||||
|---|---|---|---|---|---|---|
| Бортовая РЛС | Радар аэропорта | Автомобильный радар | Радар слежения | Радар погоды | ||
| Общая информация | Символ | |||||
| Описание | РЛС дальнего воздушного наблюдения | Наблюдение за аэропортом терминала | Автомобильный радар для использования в таких приложениях, как автоматический круиз-контроль | Наземная радиолокационная система слежения | Радар ясной воздушной погоды | |
| Вдохновлен | Воздушно-десантный сценарий представлен в [5] | ASR-9 | Bosch LRR3, TI Радары | КОБРА ДЕЙН | NEXRAD (VCP 32) | |
| Главный | Частота | 450 МГц | 2,8 ГГц | 77 ГГц | 1,25 ГГц | 2,8 ГГц |
| Полоса частот | УВЧ | S | W | L | S | |
| Пропускная способность | 4 МГц | 1,5 МГц | 300 МГц | 20 МГц | 0,5 МГц | |
| Пиковая мощность | 200 кВт | 1,1 МВТ | 30 мВт | 15 МВТ | 500 кВт | |
| Ширина импульса | 200 мкс | 1 мкс | 50 мкс | 1 мс | 1,5 мкс | |
| PRF | 300 Гц | 1 кГц | 20 кГц | 1 кГц | 320 Гц | |
| Оборудование | Температура шума | 1500 K (показатель шума 8 дБ с эталонной температурой 290K) | 950 K | 8000 K | 800 K | 450 K |
| Антенна и сканирование | Высота антенны | 6096 м (20000 футов) | 10 м | 1 м | 75 м | 20 м |
| Наклон антенны | –1° | 0.5° | 0 | 10° | 0.5° | |
| Поляризация | Горизонтальный | Горизонтальный | Горизонтальный | Горизонтальный | Горизонтальный | |
| Выгода | От ширины луча | От ширины луча | От ширины луча | От ширины луча | Руководство | |
| Азимут: 8 ° | Азимут: 1,5 ° | Азимут: 30 ° | Азимут: 1 ° | 45 дБ | ||
| Отметка: 90 ° | Отметка: 5 ° | Отметка: 10 ° | Отметка: 1 ° | |||
| Режим сканирования | Электронный | Механический | Н/Д | Н/Д | Механический | |
| Азимут ± 30 ° | Полный 360 ° | Сканирование громкости: Азимут: Полный 360 °. Отметка от 0,5 ° до 5 ° | ||||
| Время сканирования | 0,05 с | 5 с | Н/Д | Н/Д | 10 минут | |
| Обнаружение | Вероятность ложной тревоги | 10–6 | 10–6 | 10–6 | 10–6 | 10–3 |
| Количество импульсов в ИПЦ | 18 | 20 | 256 | 1 | 64 | |
| Число ИПЦ | 1 | 1 | 1 | 1 | 1 | |
| Потери и другие вводимые ресурсы | Пользовательские потери | 4 дБ | 8 дБ | 2 дБ | 2 дБ | 2 дБ |
| Прочие вводы | STC 'on' с параметрами по умолчанию | CFAR 'on' с параметрами по умолчанию | Н/Д | Н/Д | Н/Д | |
CFAR 'on' с параметрами по умолчанию | ||||||
MTI 'on' с параметрами по умолчанию | MTI 'on' с параметрами по умолчанию | |||||
| Коэффициент усиления приема: 10 дБ | ||||||
Чтобы отменить изменение, используйте клавиши CTRL + Z. Используйте клавиши Ctrl + Y, чтобы повторить отмененное изменение.
[1] Рекомендация ITU-R P.835-6 (12/2017). «Эталонные стандартные атмосферы». Женева: Международный союз электросвязи, 2017, https://www.itu.int/dms_pubrec/itu-r/rec/p/R-REC-P.835-6-201712-I!!PDF-E.pdf.
[2] Бартон, Дэвид К. Радарные уравнения для современных радаров. Норвуд, Массачусетс: Artech House, 2013.
[3] Ганн, К. Л. С. и Т. В. Р. Ист. «Микроволновые свойства частиц осадков». Ежеквартальный журнал Королевского метеорологического общества 80, № 346 (октябрь 1954): 522-45. https://doi.org/10.1002/qj.49708034603.
[4] О'Доннелл, Р. М. «Проектирование радиолокационных систем». Общество IEEE AES, Секция IEEE в Нью-Гэмпшире, Курс радиолокационных систем, январь 2010 года.
[5] Уорд, Дж. «Пространственно-временная адаптивная обработка для бортовых радаров». TR-1015, Лаборатория Линкольна Массачусетского технологического института, декабрь 1994 года. https://apps.dtic.mil/dtic/tr/fulltext/u2/a293032.pdf
[6] Чарльз С. Вассон, Системный инженерный анализ, проектирование и разработка: концепции, принципы и практики. Джон Уайли и сыновья, 2015.
