Расчет движения автомобиля по кинематической модели велосипеда
Инструментарий робототехнической системы/Алгоритмы мобильных роботов
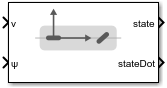
Блок Bicycle Kinematic Model создает модель велосипедного транспортного средства для моделирования упрощенной автомобильной динамики транспортного средства. Эта модель представляет собой транспортное средство с двумя осями, определяемыми длиной между осями, Wheel base. Переднее колесо можно поворачивать с углом поворота psi. Курс транспортного средства theta определяется в центре задней оси.
[1] Линч, Кевин М. и Фрэнк К. Парк. Современная робототехника: механика, планирование и управление 1-й ред. Кембридж, Массачусетс: Cambridge University Press, 2017.
[2] Корк, Питер И. Робототехника, зрение и управление: фундаментальные алгоритмы в MATLAB. Спрингер, 2011.

