Движение автомобиля по кинематической модели Аккерманна
Инструментарий робототехнической системы/Алгоритмы мобильных роботов
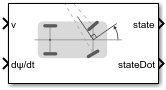
Блок Ackermann Kinematic Model создает автомобильную модель транспортного средства, использующую рулевое управление Ackermann. Эта модель представляет собой транспортное средство с двумя осями, разделенными расстоянием, Wheel base. Состояние транспортного средства определяется как четырехэлементный вектор [x y theta psi] с глобальным xy-положением, курсом транспортного средства, тета и углом поворота, psi. Курс транспортного средства и положение xy определяются в центре задней оси. Углы задаются в радианах, а глобальные положения - в метрах. Входные данные рулевого управления для транспортного средства указаны как dpsi/dt, в радианах в секунду.
[1] Линч, Кевин М. и Фрэнк К. Парк. Современная робототехника: механика, планирование и управление. 1-й ред. Кембридж, Массачусетс: Cambridge University Press, 2017.

