Настройка сети ROS обеспечивает связь между различными устройствами. Все эти участники (или узлы) регистрируются в главной системе ROS для совместного использования информации. Каждая сеть ROS имеет только одну уникальную главную сеть. Каждый узел обычно является отдельным устройством, хотя одно устройство может иметь несколько запущенных узлов. MATLAB ® выступает в качестве одного из этих узлов при взаимодействии в существующей сети ROS.
Для работы ROS-соединений все устройства должны быть подключены к одной фактической или виртуальной сети. В MATLAB можно создать новый шаблон ROS или подключиться к существующему шаблону ROS, работающему на другом устройстве. При подключении к внешнему ведущему устройству необходимо знать IP-адрес или имя хоста устройства. Начальное главное соединение ROS создается путем вызова rosinit. Дополнительные сведения о настройке и использовании сети ROS см. в разделе Сетевое подключение и исследование.
Узлы взаимодействуют, посылая сообщения с использованием сущностей, называемых издателями, подписчиками и службами. Издатели отправляют данные с использованием имен тем, которые подписчики затем получают по сети. Службы используют клиентов для запроса информации с сервера. Дополнительные сведения об отправке сообщений см. в разделе Издатели и подписчики.
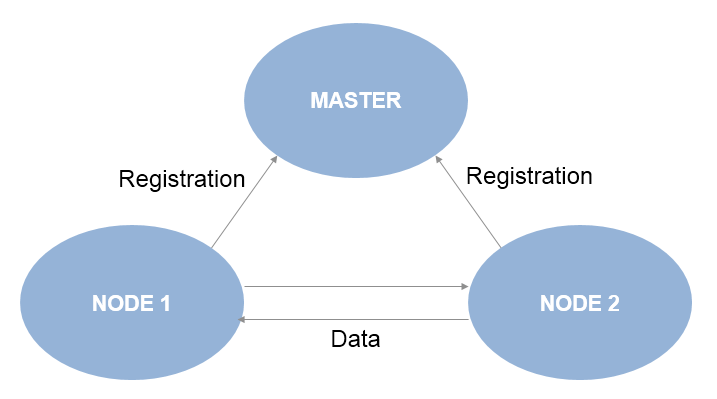
Сеть ROS представляет собой совокупность узлов, которые все подключены к ведущему узлу ROS. Количество узлов может быть достаточно большим в зависимости от приложения и устройств. Узлы, зарегистрированные в главном узле, могут взаимодействовать со всеми другими зарегистрированными узлами. Каждый узел регистрирует различных издателей, подписчиков и услуги на ведущем узле ROS для передачи и приема информации между узлами. Несмотря на то, что все узлы в сети ROS зарегистрированы в основной системе, обмен данными осуществляется непосредственно между узлами. На следующем рисунке показана структура сети ROS с двумя узлами ROS. Все узлы должны иметь двунаправленное подключение для совместного использования данных по сети. Проверка этих подключений важна во время установки.
Каждый узел регистрирует собственный URI узла вместе с ведущим. Другие участники сети ROS будут использовать этот URI для связи с узлом. Опять же, этот URI должен быть доступен каждому другому узлу в сети ROS. Для создания узла в MATLAB вызовите rosinit. Если мастер ROS уже установлен, MATLAB обнаруживает его и устанавливает URI узла соответствующим образом. В противном случае создается как главный узел ROS, так и подключенный узел.
По умолчанию каждый экземпляр MATLAB имеет один глобальный узел. Узел имеет случайно сгенерированное имя, присвоенное ему для уникальности. На этом глобальном узле работают все издатели, подписчики, клиенты служб и серверы служб.
