Принудительное ограничение сектора на конкретной карте ввода/вывода при использовании тюнера системы управления.
Конический сектор (Conic Sector Goal) создает ограничение, ограничивающее выходные траектории системы. Если для всех ненулевых входных траекторий u (t), выходная траектория z (t) = (Hu) (t) линейной системы H удовлетворяет:
dt < 0,
для всех T ≥ 0, то выходные траектории H лежат в коническом секторе, описанном симметричной неопределенной матрицей Q. Выбор различных Q-матриц накладывает различные условия на отклик системы. При создании цели конического сектора задаются входные сигналы, выходные сигналы и геометрия сектора.
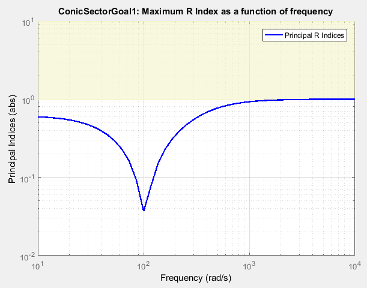
В тюнере системы управления затененная область на графике представляет область в частотной области, в которой цель настройки не достигнута. График показывает значение R-индекса, описанного в разделе О границах сектора и индексах сектора.
На вкладке «Настройка» окна «Настройка системы управления» выберите «Новая цель» > «Цель конического сектора».
При настройке систем управления в командной строке используйте TuningGoal.ConicSector для указания цели ответа на шаг.
Этот раздел диалогового окна используется для задания входов и выходов передаточной функции, ограничиваемой целью настройки. Также укажите любые расположения, в которых следует открывать контуры для оценки цели настройки.
Указать входные сигналы
Выберите одно или несколько расположений сигналов в модели в качестве входных данных функции передачи, которую ограничивает цель настройки. Чтобы ограничить отклик SISO, выберите однозначный входной сигнал. Например, чтобы ограничить выигрыш от расположения с именем 'u' в расположение с именем 'y', нажмите![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'u'. Чтобы ограничить пассивность MIMO-ответа, выберите несколько сигналов или сигнал с векторными значениями.
Указать выходные сигналы
Выберите одно или несколько расположений сигналов в модели в качестве выходных данных передаточной функции, которую ограничивает цель настройки. Чтобы ограничить отклик SISO, выберите выходной сигнал с одним значением. Например, чтобы ограничить выигрыш от расположения с именем 'u' в расположение с именем 'y', нажмите![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'y'. Чтобы ограничить пассивность MIMO-ответа, выберите несколько сигналов или сигнал с векторными значениями.
Вычислить коэффициент усиления при разомкнутых следующих контурах
Выберите одно или несколько расположений сигналов в модели, в которых следует открыть цикл обратной связи для оценки этой цели настройки. Цель настройки оценивается по конфигурации с разомкнутым контуром, созданной путем открытия контуров обратной связи в определенных местоположениях. Например, чтобы оценить цель настройки с помощью проема в месте с именем 'x', нажмите![]() Добавить сигнал в список и выберите
Добавить сигнал в список и выберите 'x'.
Совет
Чтобы выделить любой выбранный сигнал в модели Simulink ®, щелкните значок![]() . Чтобы удалить сигнал из списка ввода или вывода, щелкните значок.
. Чтобы удалить сигнал из списка ввода или вывода, щелкните значок. ![]() После выбора нескольких сигналов их можно переупорядочить с помощью
После выбора нескольких сигналов их можно переупорядочить с помощью![]() и.
и. ![]() Дополнительные сведения о том, как указать расположение сигнала для цели настройки, см. в разделе Указание целей для интерактивной настройки.
Дополнительные сведения о том, как указать расположение сигнала для цели настройки, см. в разделе Указание целей для интерактивной настройки.
С помощью этого раздела диалогового окна задайте дополнительные характеристики цели конического сектора.
Матрица конического сектора
Введите геометрию сектора Q, указанную как:
Матрица для постоянной геометрии сектора. Q является симметричной квадратной матрицей, которая ny на стороне, где ny - количество выходных сигналов, указанных для цели. Матрица Q должен быть неопределенным для описания четко определенного конического сектора. Неопределенная матрица имеет как положительные, так и отрицательные собственные значения. В частности, Q должны иметь столько же отрицательных собственных значений, сколько входных сигналов, заданных для цели настройки (размер векторного входного сигнала u (t )).
Модель LTI для частотно-зависимой геометрии сектора. Q удовлетворяет Q (s) "= Q (-s). Другими словами, Q (s) вычисляется как эрмитова матрица на каждой частоте.
Дополнительные сведения см. в разделе Сведения о границах секторов и индексах секторов.
Регуляризация
Параметр регуляризации, заданный как действительное неотрицательное скалярное значение. Регуляризация сохраняет количественно прослеживаемую оценку цели настройки, когда другие цели настройки имеют тенденцию делать сектор связанным с некоторыми частотами. Когда возникает это условие, установите регуляризацию в малую (но не пренебрежимо малую) долю типичной нормы условия прохождения в Н. Например, если вы предполагаете, что норма условия прохождения в Н будет порядка 1 во время настройки, попробуйте установить регуляризацию в 0,001.
Для получения дополнительной информации об условиях, требующих регуляризации, см. Regularization имущество TuningGoal.ConicSector.
Обеспечение цели в частотном диапазоне
Ограничьте применение цели настройки определенной полосой частот. Укажите полосу частот как вектор строки формы [min,max], выраженное в единицах частоты модели. Например, чтобы создать цель настройки, применяемую только в диапазоне от 1 до 100 рад/с, введите [1,100]. По умолчанию цель настройки применяется на всех частотах для непрерывного времени и до частоты Найквиста для дискретного времени.
Применить цель к
Эта опция используется при настройке сразу нескольких моделей, например массива моделей, полученных линеаризацией модели Simulink в различных рабочих точках или значениями параметров блока. По умолчанию активные цели настройки применяются для всех моделей. Чтобы применить требование настройки для подмножества моделей в массиве, выберите Только модели (Only Models). Затем введите индексы массива моделей, для которых применяется цель. Например, предположим, что необходимо применить цель настройки ко второй, третьей и четвертой моделям в массиве модели. Для ограничения применения требования введите 2:4 в текстовом поле «Только модели».
Дополнительные сведения о настройке для нескольких моделей см. в разделе Подходы к надежной настройке (инструментарий надежного управления).
Рассмотрим следующую систему управления.
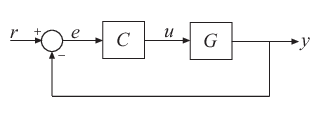
Предположим, что сигнал u помечен как точка анализа в настраиваемой модели. Предположим также, что G является функцией передачи с обратной связью от u до y. Общим приложением является создание цели настройки, которая ограничивает все траектории ввода-вывода {u (t), y (t)} G для удовлетворения:
(t)) dt < 0,
для всех T ≥ 0. Ограничение траекторий ввода-вывода G эквивалентно ограничению выходных траекторий z (t) системы H = [G; I] сектором, определяемым:
< 0.
(Дополнительные сведения об этой эквивалентности см. в разделе О границах секторов и индексах секторов.) Чтобы задать ограничение этого типа с помощью конической цели сектора, укажите u в качестве входного сигнала и укажите y и u в качестве выходных сигналов. Когда вы указываете u как вход, так и выход, Conic Sector Goal устанавливает соответствующую передаточную функцию для идентификатора. Поэтому передаточная функция, которую ограничивает цель, равна H = [G; I], как и предполагалось. Это лечение специфично для цели Конического сектора. Для других целей настройки, когда один и тот же сигнал появляется как на входах, так и на выходах, результирующая передаточная функция равна нулю при отсутствии петель обратной связи или дополнительной чувствительности в этом местоположении в противном случае. Этот результат возникает, потому что, когда программное обеспечение обрабатывает точки анализа, предполагается, что вход вводится после выхода. Дополнительные сведения о работе точек анализа см. в разделе Маркировка сигналов, представляющих интерес для анализа и проектирования системы управления.
Давайте
W2W2T
быть неопределенной факторизацией Q, где 0. (ы) является квадратной и минимальной фазой, то сектор временной области ограничен
dt < 0,
эквивалентно состоянию сектора частотной области,
0
для всех частот. Цель конического сектора использует эту эквивалентность для преобразования характеристики временной области в состояние частотной области, которое тюнер системы управления может обрабатывать таким же образом, как он обрабатывает ограничения усиления. Для обеспечения этой эквивалентности Цель Конического Сектора также делает ) минимальной фазой, делая все его нули стабильными. Нули передачи, на которые влияет это условие минимальной фазы, являются стабилизированной динамикой для этой цели настройки. Опции Минимальная скорость затухания (Minimum decay rate) и Максимальная собственная настройка частоты (Maximum natural frequency) управляют нижней и верхней границами этой неявно ограниченной динамики. Если оптимизация не соответствует границам по умолчанию или если границы по умолчанию противоречат другим требованиям, на вкладке Настройка (Tuning) воспользуйтесь опциями настройки для изменения значений по умолчанию.
Для границ секторов R-индекс играет ту же роль, что и пиковый коэффициент усиления для ограничений усиления (см. Сведения о границах секторов и индексах секторов). Условие
0
удовлетворяется на всех частотах тогда и только тогда, когда R-индекс меньше единицы. График, отображаемый настройщиком системы управления для цели конического сектора, показывает значение R-индекса как функцию частоты (см. sectorplot).
При настройке системы управления программа преобразует каждую цель настройки в нормализованное скалярное значение f (x), где x - вектор свободных (настраиваемых) параметров в системе управления. Затем программа корректирует значения параметров для минимизации f (x) или для приведения f (x) ниже 1, если цель настройки является жестким ограничением.
Для цели конического сектора - для функции переноса с замкнутым контуром H(s,x) от указанных входов до указанных выходов f (x) задаётся:
= 106.
R - относительный индекс сектора (см. getSectorIndexиз H(s,x), для сектора, представленного Q.
