Линеаризация - это линейная аппроксимация нелинейной системы, которая действительна в небольшой области вокруг рабочей точки.
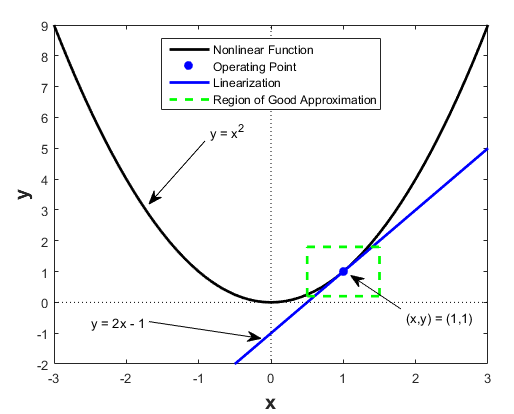
Например, предположим, что нелинейной функцией является x2. Линеаризация этой нелинейной функции относительно рабочей точки x = 1, y = 1 приводит к линейной 2x − 1.
Вблизи рабочей точки − 1 является хорошим приближением y = x2. Вдали от рабочей точки аппроксимация плохая.
На следующем рисунке показана возможная область хорошей аппроксимации для линеаризации x2. Фактическая область действия зависит от нелинейной модели.
Распространив концепцию линеаризации на динамические системы, можно записать нелинейные дифференциальные уравнения непрерывного времени в таком виде:
x (t), u (t), t).
В этих уравнениях x (t) представляет состояния системы, u (t) представляет входы в систему и y (t) представляет выходы системы.
Линеаризованная модель этой системы действительна в небольшой области вокруг рабочей точки t = t0, x (t0) = x0, u (t0) = u0 и y (t0) = g (x0, u0, t0) = y0.
Чтобы представить линеаризованную модель, определите новые переменные, центрированные относительно рабочей точки:
u0δy (t) = y (t) − y0
Линеаризованная модель в терминах δx, δu и δy действительна, когда значения этих переменных малы:
Cδx (t) + Dδu (t)
Линеаризация полезна при анализе модели и управлении приложениями конструирования.
Точная линеаризация указанной нелинейной модели Simulink ® создает линейные уравнения состояния-пространства, передаточной функции или усиления нулевого полюса, которые можно использовать для:
Постройте график реакции Боде модели Simulink.
Оцените пределы стабильности цикла, вычисляя отклик с разомкнутым контуром.
Анализ и сравнение реакции завода вблизи различных рабочих точек.
Расчетный линейный контроллер
Классический анализ системы управления и методологии проектирования требуют линейных, инвариантных по времени моделей. Simulink Control Design™ автоматически линеаризует растение при настройке компенсатора. См. раздел Выбор подхода к проектированию элементов управления.
Анализ устойчивости по замкнутому контуру.
Измеряют размер резонансов в частотной характеристике, вычисляя линейную модель с замкнутым контуром для системы управления.
Создание контроллеров с пониженной чувствительностью к изменениям параметров и ошибкам моделирования.
Программное обеспечение Simulink Control Design можно использовать для линеаризации моделей Simulink с непрерывным, дискретным или многоскоростным временем. Полученная линейная инвариантная по времени модель находится в состоянии-пространстве.
По умолчанию Simulink Control Design линеаризует модели с использованием поблочного подхода. Этот поблочный подход индивидуально линеаризует каждый блок в модели Simulink и объединяет результаты для получения линеаризации указанной системы.
Можно также линеаризовать систему с помощью числового возмущения полной модели, где программа вычисляет линеаризацию полной модели путем возмущения значений входов и состояний корневого уровня. Для каждого входа и состояния программа возмущает модель на малую величину и вычисляет линейную модель на основе отклика модели на эти возмущения. Модель можно возмущать с помощью либо прямых, либо центральных разниц.
Подход поблочной линеаризации имеет несколько преимуществ для полномодельных числовых возмущений:
Большинство блоков Simulink имеют предварительно запрограммированную линеаризацию, которая обеспечивает точную линеаризацию блока.
Точки линейного анализа можно использовать для задания части модели для линеаризации.
Блоки можно настроить на использование пользовательских линеаризаций без влияния на моделирование модели.
Структурно неминеральные состояния удаляются автоматически.
Можно указать линеаризации, включающие неопределенность (требуется программное обеспечение Toolbox™ надежного управления).
Вы можете получить подробную диагностическую информацию.
При линеаризации многоскоростных моделей можно использовать различные методы преобразования тарифов. Численное возмущение полной модели может использовать только преобразование скорости удержания нулевого порядка.
Точная линеаризация поддерживает большинство блоков Simulink.
Однако блоки Simulink с сильными разрывами или динамикой на основе событий линеаризуются (правильно) до нуля или большого (бесконечного) усиления. Модели, включающие поведение на основе событий или прерывистого поведения, требуют специальной обработки программным обеспечением Simulink Control Design. Такое основанное на событиях или прерывистое поведение может происходить из таких блоков, как:
Блоки из библиотеки прерываний
Диаграммы Stateflow ®
Инициируемые подсистемы
Сигналы широтно-импульсной модуляции (ШИМ)
Для большинства приложений состояния модели Simulink должны находиться в устойчивом состоянии. В противном случае линейная модель действительна только через небольшой интервал времени.
Выбор правильной рабочей точки для линеаризации имеет решающее значение для получения точной линейной модели. Линейная модель - это аппроксимация нелинейной модели, которая допустима только вблизи рабочей точки линеаризации модели.
Хотя задаются блоки Simulink для линеаризации, все блоки в модели влияют на рабочую точку.
Нелинейная модель может иметь две очень разные линейные аппроксимации при линеаризации относительно различных рабочих точек.
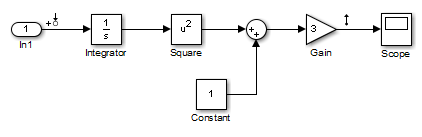
Далее показан результат линеаризации для этой модели с начальным условием для интегрирования x0 = 0.

В этой таблице представлены различные результаты линеаризации для двух различных рабочих точек.
| Рабочая точка | Результат линеаризации |
|---|---|
Исходное условие = 5, состояние x1 = 5 | 30/с |
Начальное условие = 0, состояние x1 = 0 | 0 |
Модель Simulink можно линеаризовать в трех различных рабочих точках:
Отсеченная рабочая точка - линеаризация в отсеченной рабочей точке
Снимок моделирования - линеаризация в снимке моделирования
Инициированное событие моделирования - линеаризация при инициированных событиях моделирования
