В Simulink ® можно моделировать системы управления с планированием коэффициента усиления, в которых коэффициент усиления контроллера зависит от плановых переменных, таких как время, рабочие условия или параметры модели. Библиотека линейных изменяющихся параметров блоков в Toolbox™ системы управления позволяет реализовать общие элементы системы управления с переменным коэффициентом усиления. Для реализации графика усиления используются такие блоки, как таблицы поиска или функциональные блоки MATLAB, что дает зависимость этих коэффициентов от переменных планирования .
Для моделирования запланированной системы управления усилением в Simulink:
Определите переменные планирования и сигналы, которые представляют их в модели. Например, если ваша система является крейсерским самолетом, то плановыми переменными могут быть угол падения и воздушная скорость самолета.
Используйте блок таблицы поиска или блок функции MATLAB для реализации коэффициента усиления, который зависит от переменных планирования. Если у вас нет значений таблицы подстановки или выражений MATLAB ® для графиков увеличения производительности, соответствующих требованиям к производительности, можно использоватьsystune чтобы настроить их. См. раздел Настройка графиков усиления в Simulink.
Замените обычные элементы управления элементами планирования усиления. Например, вместо контроллера PID с фиксированным коэффициентом используйте блок контроллера PID с переменным коэффициентом, в котором графики усиления определяют коэффициенты усиления PID.
При необходимости добавьте в модель логику планирования и защитные средства.
График усиления преобразует текущие значения переменных планирования в коэффициенты усиления контроллера. Существует несколько способов реализации графика усиления в Simulink.
Доступные блоки для реализации таблиц подстановки включают в себя:
Таблицы подстановок - таблица подстановок представляет собой список точек останова и соответствующих значений усиления. Когда переменные планирования попадают между точками останова, таблица поиска интерполирует между соответствующими коэффициентами усиления. Используйте следующие блоки для реализации графиков усиления в виде таблиц поиска.
Справочная таблица 1-D, 2-я Справочная таблица, n-D Справочная таблица - Для скалярной выгоды, которая зависит от один, два, или больше переменных планирования.
Матричная интерполяция (Matrix Interpolation) - для матричного коэффициента усиления, который зависит от одной, двух или трех переменных планирования. (Этот блок находится в библиотеке Simulink Extras.)
Функциональный блок MATLAB - при наличии функционального выражения, связывающего выигрыши с переменными планирования, используйте функциональный блок MATLAB. Если выражение является гладкой функцией, использование функции MATLAB может привести к более плавным изменениям коэффициента усиления, чем таблица подстановки. Кроме того, если вы используете продукт генерации кода, такой как Simulink Coder™, для реализации контроллера в аппаратном обеспечении, функция MATLAB может привести к более эффективной реализации памяти, чем таблица поиска.
Вы можете использовать
systune для настройки графиков усиления, реализуемых в виде таблиц поиска или функций MATLAB. См. раздел Настройка графиков усиления в Simulink.
В качестве примера модель rct_CSTR включает контроллер ПИ и свинцовый компенсатор, в котором извлекает пользу диспетчер, осуществлены как справочные таблицы, используя 1-D блоки Справочной таблицы. Откройте модель и проверьте контроллеры.
open_system(fullfile(matlabroot,'examples','controls_id','rct_CSTR.slx'))
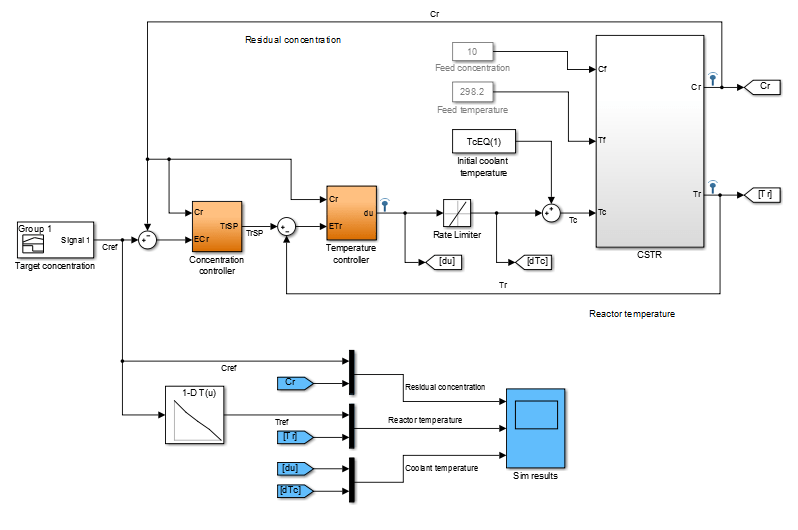
Оба Concentration controller и Temperature controller блоки принимают CSTR производительность установки, Cr, в качестве входных данных. Это значение является как управляемой переменной системы, так и переменной планирования, от которой зависит действие контроллера. Дважды щелкните значок Concentration controller блок.
Этот блок является PI-контроллером, в котором пропорциональный коэффициент усиления Kp и усиление интегратора Ki определяются подачей параметра планирования Cr в 1-D блок Справочной таблицы. Аналогично, Temperature controller блок содержит три усиления, реализованные в виде таблиц подстановки.
Библиотека блоков «Изменение линейных параметров» панели инструментов системы управления используется для реализации общих управляющих элементов с переменными параметрами или коэффициентами. Эти блоки обеспечивают общие элементы, в которых коэффициенты усиления или параметры доступны в качестве внешних входных данных. В следующей таблице перечислены некоторые приложения этих блоков.
| Блок | Приложение |
|---|---|
| Эти блоки используются для реализации фильтра нижних частот Баттерворта, в котором частота отсечения изменяется в зависимости от переменных планирования. | |
| Эти блоки используются для реализации фильтра выемок, в котором частота, ширина и глубина выемки изменяются в зависимости от переменных планирования. | |
| Эти блоки являются предварительно сконфигурированными версиями блоков PID Controller и PID Controller (2DOF). Используйте их для реализации контроллеров PID, в которых выигрыш PID варьируется в зависимости от переменных планирования. |
| Используйте эти блоки для реализации передаточной функции любого порядка, в котором полиномиальные коэффициенты числителя и знаменателя изменяются в зависимости от переменных планирования. | |
| Эти блоки используются для реализации контроллера пространства состояний, в котором матрицы A, B, C и D изменяются в зависимости от переменных планирования. | |
| Эти блоки используются для реализации запланированного по коэффициенту усиления контроллера состояния-пространства в форме наблюдателя, такого как контроллер LQG. В таком контроллере матрицы A, B, C, D и матрицы состояния обратной связи и состояния наблюдателя изменяются в зависимости от переменных планирования. |
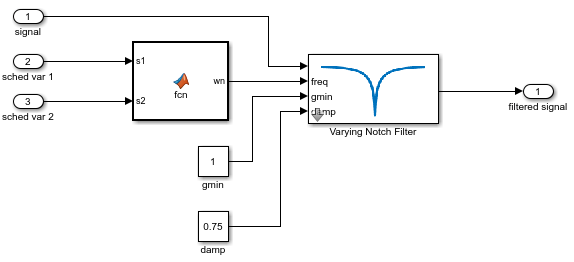
Например, подсистема на следующей иллюстрации использует блок изменяющегося фильтра пробок для реализации фильтра, частота пробок которого изменяется как функция двух переменных планирования. Взаимосвязь между частотой пробки и переменными планирования реализуется в функции MATLAB.
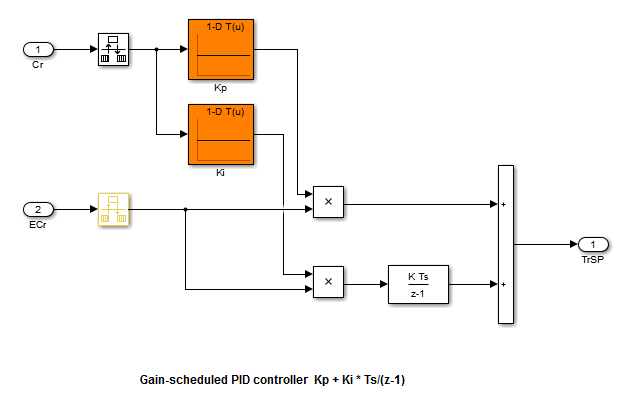
В качестве другого примера следующая подсистема представляет собой ПИ-контроллер с запланированным коэффициентом усиления, в котором и пропорциональный, и интегральный коэффициенты усиления зависят от одной и той же переменной планирования. Этот контроллер использует блоки таблицы поиска 1-D для реализации графиков усиления.
Можно также реализовать матричные графики усиления Simulink. График усиления со значением матрицы принимает одну или несколько переменных планирования и возвращает матрицу, а не скалярное значение. Например, предположим, что требуется реализовать изменяющийся во времени контроллер LQG вида:
Du) u = − Kxe,
где, в общем, матрицы A, B, C и D пространства состояний, матрица K состояния-обратной связи и матрица L усиления наблюдателя изменяются со временем. В этом случае время является переменной планирования, и график усиления определяет значения матриц в данный момент времени.
В модели Simulink можно реализовать матричные графики усиления, используя:
Функциональный блок MATLAB - указывает функцию MATLAB, которая принимает переменные планирования и возвращает значения матрицы.
Блок интерполяции матрицы (Matrix Interpolation block) - указывает таблицу подстановки для связывания значения матрицы с каждой переменной планирования точкой останова. Между точками останова блок интерполирует элементы матрицы. (Этот блок находится в библиотеке Simulink Extras.)
Для контроллера LQG используйте либо функциональные блоки MATLAB, либо блоки интерполяции матриц для реализации изменяющихся во времени матриц в качестве входных данных для блока изменяющейся формы наблюдателя. Например:
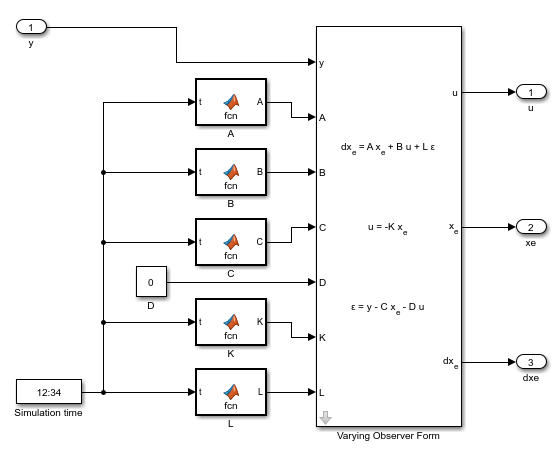
В этой реализации каждая изменяющаяся во времени матрица реализуется как функциональный блок MATLAB, в котором связанная функция занимает время моделирования и возвращает матрицу соответствующих размеров.
Можно настроить матричные графики усиления, реализованные в виде функциональных блоков MATLAB или блоков интерполяции матриц. Однако для настройки блока интерполяции матрицы необходимо задать для параметра Simulate значение Interpreted execution. Сведения о режимах моделирования см. на странице ссылок блока Интерполяция матрицы (Matrix Interpolation).
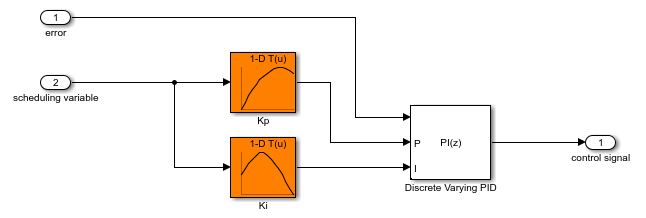
Запланированные выигрыши можно также использовать для создания собственных элементов управления. Например, модель rct_CSTR включает в себя запланированный по коэффициенту усиления компенсатор выводов с тремя коэффициентами, которые зависят от переменной планирования, CR. Чтобы увидеть, как реализован этот компенсатор, откройте модель и изучите Temperature controller подсистема.
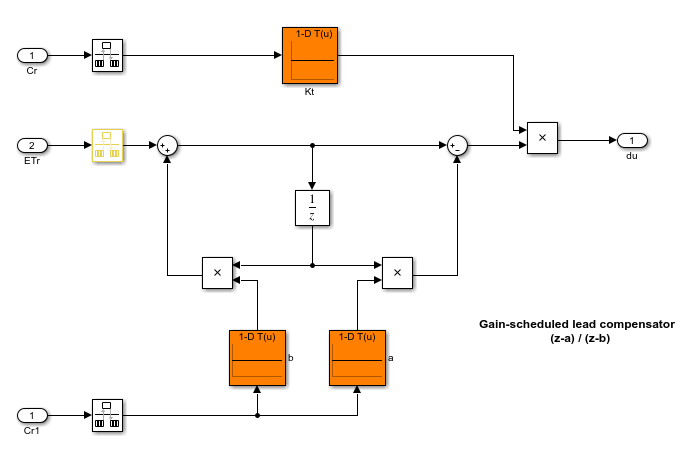
Здесь общий выигрыш Kt, нулевое местоположение a, и местоположение полюса b каждый из них реализован в виде таблицы поиска 1-D, которая принимает переменную планирования в качестве входных данных. Таблицы поиска поступают непосредственно в блоки продуктов.
Для таблицы подстановки или функционального блока MATLAB, реализующего расписание усиления для настройки с помощью systune, в конечном итоге, она должна быть использована либо в:
Блок в библиотеке блоков «Изменение линейных параметров».
Блок произведения, который применяет усиление к данному сигналу. Например, если блок произведения принимает в качестве входных сигналов запланированный коэффициент усиления g (α) и сигнал u (t), то выходной сигнал блока равен y (t) = g (α) u (t).
Между таблицей поиска или функциональным блоком MATLAB и блоком Product или блоком с изменяющимися параметрами может быть один или несколько следующих блоков:
Выгода
Уклон
Блоки, эквивалентные единичному усилению в линейной области, включая:
Задержка транспортировки, переменная задержка транспортировки
Сатурате, Дэдзоне
Ограничитель скорости, переход скорости
Квантователь, память, удержание нулевого порядка
MinMax
Преобразование типа данных
Спецификация сигнала
Блоки переключения, включая:
Выключатель
Мультипортовый коммутатор
Ручное переключение
Вставка таких блоков может быть полезна, например, для ограничения значения коэффициента усиления определенным диапазоном или для указания того, как часто обновляется график коэффициента усиления.
