Дополнительная функция чувствительности в указанной точке с помощью slLinearizer или slTuner интерфейс
linsys = getCompSensitivity(s,pt)slLinearizer или slTuner интерфейс, s.
Программное обеспечение обеспечивает все постоянные отверстия, указанные для s при вычислении linsys. Если вы настроили либо s.Parameters, или s.OperatingPoints, или оба, getCompSensitivity выполняет несколько линеаризаций и возвращает массив комплементарных функций чувствительности.
linsys = getCompSensitivity(s,pt,temp_opening)temp_opening. Используйте отверстие, например, для вычисления функции дополнительной чувствительности внутреннего контура с открытым внешним контуром.
linsys = getCompSensitivity(___,mdl_index)mdl_index задает индекс интересующих линеаризаций в дополнение к любому из входных аргументов в предыдущих синтаксисах.
Этот синтаксис используется для эффективной линеаризации, если требуется получить функцию дополнительной чувствительности только для подмножества результатов пакетной линеаризации.
Получение дополнительной функции чувствительности, рассчитанной на выходе установки, для ex_scd_simple_fdbk модель.
Откройте окно ex_scd_simple_fdbk модель.
mdl = 'ex_scd_simple_fdbk';
open_system(mdl);

В этой модели:

Создание slLinearizer интерфейс для модели.
sllin = slLinearizer(mdl);
Для вычисления дополнительной функции чувствительности на выходе установки используйте y сигнал в качестве точки анализа. Добавить эту точку в sllin.
addPoint(sllin,'y');
Получить дополнительную функцию чувствительности при y.
sys = getCompSensitivity(sllin,'y');
tf(sys)
ans = From input "y" to output "y": -3 ----- s + 8 Continuous-time transfer function.
Программа добавляет вывод линеаризации в yс последующим вводом линеаризации, dy.

sys является функцией переноса из dy кому y, что равно.
Для scdcascade модель, получить функцию комплементарной чувствительности для внутреннего контура в y2.
Откройте окно scdcascade модель.
mdl = 'scdcascade';
open_system(mdl);

Создание slLinearizer интерфейс для модели.
sllin = slLinearizer(mdl);
Вычисление дополнительной функции передачи чувствительности для внутреннего контура при y2, используйте y2 сигнал в качестве точки анализа. Для устранения влияния внешнего контура разорвать внешний контур при y1m. Добавить обе эти точки в sllin.
addPoint(sllin,{'y2','y1m'});
Получить функцию дополнительной чувствительности для внутреннего контура при y2.
sys = getCompSensitivity(sllin,'y2','y1m');
Здесь, 'y1m', третий входной аргумент, задает временное отверстие для внешнего цикла.
Предположим, что пакетная линеаризация scdcascade модель для нескольких передаточных функций. Для большинства линеаризаций изменяется пропорция (Kp2) и интегральное усиление (Ki2) C2 контроллер в диапазоне 10%. Для этого примера вычислите функцию дополнительной чувствительности для внутреннего цикла для максимального значения Kp2 и Ki2.
Откройте окно scdcascade модель.
mdl = 'scdcascade';
open_system(mdl);

Создание slLinearizer интерфейс для модели.
sllin = slLinearizer(mdl);
Варьировать пропорциональное (Kp2) и интегральное усиление (Ki2) C2 контроллер в диапазоне 10%.
Kp2_range = linspace(0.9*Kp2,1.1*Kp2,3); Ki2_range = linspace(0.9*Ki2,1.1*Ki2,5); [Kp2_grid,Ki2_grid]=ndgrid(Kp2_range,Ki2_range); params(1).Name = 'Kp2'; params(1).Value = Kp2_grid; params(2).Name = 'Ki2'; params(2).Value = Ki2_grid; sllin.Parameters = params;
Чтобы вычислить дополнительную чувствительность внутреннего контура, используйте y2 сигнал в качестве точки анализа. Для устранения влияния внешнего контура разорвать внешний контур при y1m. Добавить обе эти точки в sllin.
addPoint(sllin,{'y2','y1m'})
Определите индекс для максимальных значений Ki2 и Kp2.
mdl_index = params(1).Value == max(Kp2_range) & params(2).Value == max(Ki2_range);
Получить дополнительную функцию передачи чувствительности при y2.
sys = getCompSensitivity(sllin,'y2','y1m',mdl_index);
Откройте модель Simulink.
mdl = 'watertank';
open_system(mdl)

Создайте набор опций линеаризации и задайте StoreOffsets вариант.
opt = linearizeOptions('StoreOffsets',true);
Создать slLinearizer интерфейс.
sllin = slLinearizer(mdl,opt);
Добавьте точку анализа в выходном порту резервуара.
addPoint(sllin,'watertank/Water-Tank System');
Вычислите дополнительную функцию чувствительности в yи получить соответствующие смещения линеаризации.
[sys,info] = getCompSensitivity(sllin,'watertank/Water-Tank System');
Просмотр смещений.
info.Offsets
ans =
struct with fields:
x: [2x1 double]
dx: [2x1 double]
u: 1
y: 1
StateName: {2x1 cell}
InputName: {'watertank/Water-Tank System'}
OutputName: {'watertank/Water-Tank System'}
Ts: 0
pt - Наименование сигнала точки анализаИмя сигнала точки анализа, указанное как:
Символьный вектор или строка - имя сигнала точки анализа.
Для определения имени сигнала, связанного с точкой анализа, введите s. Программа отображает содержимое s в окне команд MATLAB ®, включая имена сигналов точек анализа, имена блоков и номера портов. Предположим, что точка анализа имеет не имя сигнала, а только имя блока и номер порта. Можно указатьpt в качестве имени блока. Использование точки, отсутствующей в списке точек анализа для s, сначала добавьте точку, используя addPoint.
Можно указать pt как однозначно совпадающая часть полного имени сигнала или имени блока. Предположим, что полное имя сигнала точки анализа равно 'LoadTorque'. Можно указать pt как 'Torque' до тех пор, пока 'Torque' не является частью имени сигнала для любой другой точки анализа s.
Например, pt = 'y1m'.
Массив ячеек символьных векторов или строкового массива - указывает несколько имен точек анализа. Например, pt = {'y1m','y2m'}.
Вычислять linsys, программное обеспечение добавляет выходной сигнал линеаризации, а затем входной сигнал линеаризации на pt.
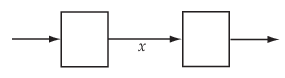
Рассмотрим следующую модель:
Определить pt как 'y':
Вычисляет программное обеспечение linsys как передаточная функция от dy кому y.
При указании pt как множественные сигналы, например pt = {'u','y'}, программное обеспечение добавляет выходной сигнал линеаризации, за которым следует входной сигнал линеаризации в каждой точке.
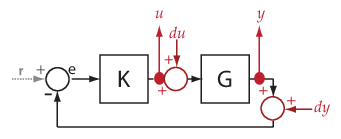
du и dy являются входами линеаризации, и u и y являются выходами линеаризации. Вычисляет программное обеспечение linsys как передаточная функция MIMO с передаточной функцией от каждого входа линеаризации к каждому выходу линеаризации.
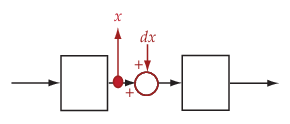
Дополнительная функция чувствительности в точке представляет собой передаточную функцию от аддитивного возмущения в точке к измерению в той же точке. В отличие от функции чувствительности, возмущение добавляется после измерения.
Чтобы вычислить дополнительную функцию чувствительности в точке анализа, x, программное обеспечение добавляет вывод линеаризации на xс последующим вводом линеаризации, dx. Дополнительная функция чувствительности - это передаточная функция от dx кому x.
| Точка анализа в модели Simulink | Как getCompSensitivity Интерпретирует точку анализа | Дополнительная функция чувствительности |
|---|---|---|
|
|
| Функция переноса из |
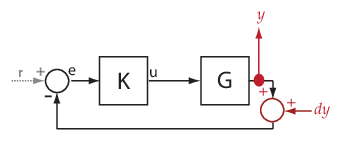
Например, рассмотрим следующую модель, в которой вычисляется дополнительная функция чувствительности в y:
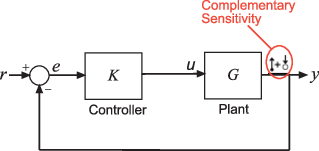
Здесь программное обеспечение добавляет вывод линеаризации в yс последующим вводом линеаризации, dy. Дополнительная функция чувствительности при y, T, - передаточная функция от dy кому y. Т рассчитывается следующим образом:
+ GK) −1GK︸Tdy.
Здесь I - единичная матрица того же размера, что и GK. Дополнительная функция передачи чувствительности при y равно -1 умножить передаточную функцию с замкнутым контуром от r кому y.
Как правило, дополнительная функция чувствительности T, вычисленная из опорных сигналов к выходам установки, равна I-S. Здесь S - функция чувствительности в точке, а I - единичная матрица соизмеримого размера. Однако, потому что getCompSensitivity добавляет выходной сигнал линеаризации и входной сигнал в той же точке, T, как возвращено getCompSensitivity, равно S-I.
При вычислении дополнительной функции чувствительности программа не изменяет модель Simulink.
addOpening | addPoint | getIOTransfer | getLoopTransfer | getSensitivity | slLinearizer | slTuner