Вычислить и выполнить автономное задание БПЛА
Инструментарий БПЛА/Алгоритмы
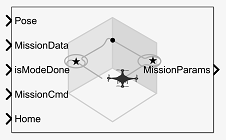
Блок Path Manager вычисляет параметры миссии для беспилотного летательного аппарата (БЛА) путём последовательного переключения между точками миссии, указанными в порте ввода MissionData. Входной порт MissionCmd изменяет порядок выполнения во время выполнения. Блок поддерживает как многороторные, так и стационарные БПЛА.
Pose - Текущая поза БПЛАТекущая поза БПЛА, заданная как четырехэлементный вектор столбца [x;y;z;courseAngle]. x, y и z - текущее положение БПЛА в координатах северо-восточнее вниз (NED), указанных в метрах. coursAngle задает угол курса в радианах в диапазоне [-pi, pi].
Типы данных: single | double
MissionData - данные миссии БПЛАUAVPathManagerBus автобусДанные миссии БПЛА, указанные как UAVPathManagerBus мкс. UAVPathManagerBus шина имеет три элемента шины mode, position, и params.
Можно использовать блок Constant (Simulink), чтобы указать данные задания как массив структур n-by-1 и установить тип выходных данных как Bus:UAVPathManagerBus. n - количество точек миссии. Поля каждой структуры:
mode - Режим точки задания, определяемый как 8-битное беззнаковое целое число от 1 до 6.
position - Положение точки полета, определяемое как трехэлементный вектор столбца [x;y;z]. x, y и z - положение в координатах северо-восточнее вниз (NED), заданное в метрах.
params - Параметры точки задания, определяемые как четырехэлементный вектор столбца.
Значения, присвоенные полям, в свою очередь, присваиваются соответствующим элементам шины в UAVPathManagerBus автобус.
В этой таблице описываются типы mode и соответствующие значения для position и params поля в структуре точки задания.
mode | position | params | Описание режима |
|---|---|---|---|
uint8(1) | [x;y;z] | [p1;p2;p3;p4] | Взлет - взлет с земли и перемещение в заданное положение |
uint8(2) | [x;y;z] |
yaw - угол рыскания в радианах в диапазоне радиус - радиус перехода в метрах | ППМ - переход к ППМ |
uint8(3) |
x, y и z - центр круговой орбиты в координатах NED, указанных в метрах |
радиус - радиус орбиты в метрах turnDir - направление поворота, указанное как одно из следующих:
numTurns - Количество оборотов | Орбита (Orbit) - орбита по окружности окружности, определяемой параметрами |
uint8(4) | [x;y;z] | [p1;p2;p3;p4] | Земля - Земля в указанном положении |
uint8(5) |
Положение пуска указано в | [p1;p2;p3;p4] | RTL - Возврат в пусковое положение |
uint8(6) | [x;y;z] |
p1, p2, p3 и p4 - пользовательские параметры, соответствующие пользовательской точке миссии. | Заказной - Заказной пункт миссии |
Примечание
p1, p2, p3 и p4 являются параметрами, заданными пользователем.
Пример: [struct('mode',uint8(1),'position',[0;0;100],'params',[0;0;0;0])]
Типы данных: bus
IsModeDone - Определить, было ли выполнено заданиеОпределить, был ли выполнен пункт миссии, указанный как 0 (true) или 1 (false).
Типы данных: Boolean
MissionCmd - Команда на изменение миссииuint8(0) (по умолчанию) | 8-битное беззнаковое целое число от 0 до 3Команда для изменения задания во время выполнения, заданная как 8-битное беззнаковое целое число от 0 до 3.
В этой таблице описываются возможные команды миссии.
| Командование миссии | Описание |
|---|---|
uint8(0) | По умолчанию - выполнение миссии от первой до последней точки миссии в последовательности |
uint8(1) | Удержание - удержание в текущей точке миссии Лойтер вокруг текущего положения для самолета и зависание в текущем положении для многороторных БПЛА |
uint8(2) | Повторить - Повторить задание после достижения последней точки задания |
uint8(3) | RTL - режим возврата к запуску (RTL) После RTL миссия возобновляется, если |
Типы данных: uint8
Home - Местоположение дома БПЛАМестоположение дома БПЛА, указанное как трехэлементный вектор колонны [x;y;z]. x, y и z - положение в координатах северо-восточнее вниз (NED), заданное в метрах.
Типы данных: single | double
MissionParams - Параметры полета БПЛАUAVPathManagerBus автобусПараметры полета БПЛА, возвращенные в виде массива шин типа 2 на 1 UAVPathManagerBus. Первый элемент массива шин является текущей точкой миссии, а второй элемент массива шин является предыдущей точкой миссии.
В этой таблице описываются выходные параметры задания в зависимости от режима задания.
| Режим текущей миссии | Параметры выходного задания | |||
|---|---|---|---|---|
| Баллы миссии | mode | position | params | |
Взлет | Первый элемент шины: Текущий | uint8(1) | [x;y;z] | [p1;p2;p3;p4] |
Второй элемент шины: Предыдущий |
|
|
| |
Waypoint | Первый элемент шины: Текущий | uint8(2) | [x;y;z] |
yaw - угол рыскания в радианах в диапазоне радиус - радиус перехода в метрах |
Второй элемент шины: Предыдущий |
|
|
coursAngle - угол отрезка линии между предыдущим и текущим положением, заданный в радианах в диапазоне | |
Орбита | Первый элемент шины: Текущий | uint8(3) |
x, y и z - центр круговой орбиты в координатах NED, указанных в метрах |
радиус - радиус орбиты в метрах turnDir - направление поворота, указанное как одно из следующих:
numTurns - Количество оборотов |
Второй элемент шины: Предыдущий |
|
|
| |
Земля | Первый элемент шины: Текущий | uint8(4) | [x;y;z] | [p1;p2;p3;p4] |
Второй элемент шины: Предыдущий |
|
|
| |
RTL | Первый элемент шины: Текущий | uint8(5) |
Положение пуска указано в | [p1;p2;p3;p4] |
Второй элемент шины: Предыдущий |
|
|
| |
Обычай | Первый элемент шины: Текущий | uint8(6) | [x;y;z] |
p1, p2, p3 и p4 - пользовательские параметры, соответствующие пользовательской точке миссии. |
Второй элемент шины: Предыдущий |
|
|
| |
Примечание
p1, p2, p3 и p4 являются параметрами, заданными пользователем.
При начале моделирования предыдущая точка задания переводится в режим «Вооружено».
| способ | положение | парамы |
|---|---|---|
uint8(0) |
| [-1;-1;-1;-1] |
Установите конечную точку задания в режим RTL или Land, иначе конечная точка задания автоматически устанавливается в режим удержания.
В этой таблице описываются параметры выходного задания, когда вход входного порта MissionCmd установлен в режим удержания.
| Тип БПЛА | Параметры выходного задания | |||
|---|---|---|---|---|
| Баллы миссии | mode | position | params | |
Мультиротор | Первый элемент шины: Текущий | uint8(7) | [x;y;z] | [-1;-1;-1;-1] |
Второй элемент шины: Предыдущий |
|
|
| |
Крыло | Первый элемент шины: Текущий | uint8(7) |
x, y и z - центр круговой орбиты в координатах NED, указанных в метрах |
радиус - радиус Лойтера указан в turnDir - направление поворота указано как |
Второй элемент шины: Предыдущий |
|
|
| |
Типы данных: bus
UAV type - Тип БПЛАmultirotor (по умолчанию) | fixed-wingТип БПЛА, указанный как multirotor или fixed-wing.
Настраиваемый: Нет
Loiter radius - Радиус Лойтера для БПЛАРадиус Лойтера для БПЛА, указанный как положительный числовой скаляр в метрах.
Зависимости: Чтобы включить этот параметр, установите для параметра типа БПЛА значение fixed-wing.
Настраиваемый: Нет
Data type - Тип данных шины входного заданияdouble (по умолчанию) | singleТип данных шины входного задания, указанный как double или single.
Настраиваемый: Нет
Mission bus name - Наименование шины входного задания'UAVPathManagerBus' (по умолчанию)Наименование шины входного задания, указанное как 'UAVPathManagerBus'.
Настраиваемый: Нет
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
