Интересующее расположение орбиты с помощью БПЛА
Инструментарий БПЛА/Алгоритмы
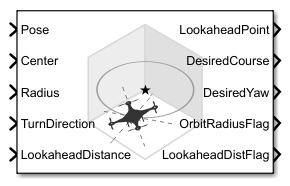
Блок сопровождения орбиты генерирует элементы управления курсом и рысканием для следования по круговой орбите вокруг интересующего местоположения на основе текущей позы беспилотного летательного аппарата (БЛА). Выбрать БПЛА типа БПЛА или БПЛА. Можно указать любое местоположение центра орбиты, радиус орбиты и направление поворота. Для настройки отслеживания пути и формирования выходных данных LookahsPoint используется значение LookahedDistance.
Pose - Текущая поза БПЛА[x y z course] векторТекущая поза БПЛА, указанная как [x y z course] вектор. [x y z] - положение БПЛА в координатах NED (северо-восточнее вниз), указанных в метрах. course - угол между скоростью грунта и северным направлением в радианах в секунду.
Пример:
[1,1,-10,pi/4]
Типы данных: single | double
Center - Центр орбиты[x y z] векторЦентр орбиты, указанный как [x y z] вектор. [x y z] - положение центра орбиты в координатах NED (северо-восточнее вниз), указанных в метрах.
Пример:
[5,5,-10]
Типы данных: single | double
Radius - Радиус орбитыРадиус орбиты, заданный как положительный скаляр в метрах.
Пример:
5
Типы данных: single | double
TurnDirection - Направление орбитыНаправление орбиты, указанное как скаляр. Положительные значения указывают на поворот по часовой стрелке, если смотреть сверху. Отрицательные значения указывают на поворот против часовой стрелки. Значение 0 автоматически определяет значение на основе ввода в Pose.
Пример:
-1
Типы данных: single | double
LookaheadDistance - Дальность слежения за орбитойДальность поиска для отслеживания орбиты, заданная как положительный скаляр. Настройка этого значения помогает отрегулировать, насколько плотно БПЛА следует за орбитальным кругом. Меньшие значения улучшают отслеживание, но могут привести к колебаниям на пути.
Пример:
2
Типы данных: single | double
ResetNumTurns - Сброс для подсчета оборотовСброс для подсчета оборотов, заданного как числовой сигнал. Любой восходящий сигнал инициирует сброс выходного сигнала NumTurns.
Пример:
2
Чтобы включить этот ввод, выберите rising для внешнего сброса.
Типы данных: single | double
LookaheadPoint - Заглавная точка на пути[x y z] вектор положенияТочка Lookahead на пути, возвращенная как [x y z] вектор положения в метрах.
Типы данных: double
DesiredCourse - Желаемый курсТребуемый курс, возвращаемый как числовой скаляр в радианах в диапазоне [-pi, pi]. Курс БПЛА - угол направления вектора скорости относительно севера, измеренный в радианах. Для БПЛА фиксированного типа значения нужного курса и желаемого рыскания равны.
Типы данных: double
DesiredYaw - Желаемое рысканиеТребуемое значение yaw, возвращаемое в виде числового скаляра в радианах в диапазоне [-pi, pi]. Рыскание БПЛА - направление БПЛА вперёд (независимо от вектора скорости) относительно севера, измеренное в радианах. Для БПЛА фиксированного типа значения нужного курса и желаемого рыскания равны.
Типы данных: double
OrbitRadiusFlag - Флаг радиуса орбиты0 (по умолчанию) | 1Флаг радиуса орбиты, возвращенный как 0 или 1. 0 указывает, что радиус орбиты не насыщен, 1 указывает, что радиус орбиты насыщен до заданного минимального значения радиуса орбиты.
Типы данных: uint8
LookaheadDistFlag - Флаг расстояния Lookahead0 (по умолчанию) | 1Флаг расстояния Lookahead, возвращенный как 0 или 1. 0 указывает на то, что расстояние между путями не насыщено, 1 указывает, что расстояние до точки обзора насыщено до заданного минимального значения расстояния до точки обзора.
Типы данных: uint8
CrossTrackError - Перекрестная ошибка от положения БПЛА к путиОшибка перекрестной дорожки от положения БПЛА до пути, возвращенная в виде положительного числового скаляра в метрах. Ошибка измеряет перпендикулярное расстояние от положения БПЛА до ближайшей точки на пути.
Этот порт отображается, только если установлен флажок Show CrossTrackError.
Типы данных: double
NumTurns - Количество раз, когда БПЛА завершал орбитуКоличество раз, когда БПЛА завершал орбиту, возвращался в виде числового скаляра. По мере того, как БПЛА окружает центральную точку, это значение увеличивается или уменьшается на основании указанного Направления поворота. Десятичные значения указывают на частичное завершение круга. Если ошибка перекрестной дорожки БПЛА превышает расстояние обзора, количество поворотов не обновляется.
NumTurns сбрасывается при каждом изменении центра, радиуса или направления точения. Можно также использовать входные данные ResetNumTurns.
Этот порт отображается только в том случае, если установлен флажок Show NumTurns output port.
UAV type - Тип БПЛАfixed-wing (по умолчанию) | multirotorТип БПЛА, указанный как fixed-wing или multirotor.
Этот параметр не настраивается.
Minimum orbit radius (m) - Минимальный радиус орбиты1 (по умолчанию) | положительный числовой скалярМинимальный радиус орбиты, заданный как положительный числовой скаляр в метрах.
Если вход в порт Radius орбиты меньше минимального радиуса орбиты, флажок Radius Flag возвращается как 1 и значение радиуса орбиты задается как значение минимального радиуса орбиты.
Этот параметр не настраивается.
Minimum lookahead distance (m) - Минимальное расстояние до точки обзора0.1 (по умолчанию) | положительный числовой скалярМинимальное расстояние до точки обзора, указанное как положительный числовой скаляр в метрах.
Если вход в порт Lookahendistance Distance меньше минимального расстояния lookahhead, то LookahedDistFlag возвращается как 1 и значение расстояния до точки обзора задается как значение минимального расстояния до точки обзора.
Этот параметр не настраивается.
External reset - Сброс источника триггераnone (по умолчанию) | risingВыбрать rising для включения ввода блока ResetNumTurns.
Этот параметр не настраивается.
Show CrossTrackError output port - Выходная ошибка перекрестной дорожкиoff (по умолчанию) | onВывод ошибки перекрестной дорожки из порта CrossTrackError.
Этот параметр не настраивается.
Show NumTurns output port - Вывод состояния ППМ БПЛАoff (по умолчанию) | onВывод состояния ППМ БПЛА из порта Status.
Этот параметр не настраивается.
1. Если смысл перевода понятен, то лучше оставьте как есть и не придирайтесь к словам, синонимам и тому подобному. О вкусах не спорим.
2. Не дополняйте перевод комментариями “от себя”. В исправлении не должно появляться дополнительных смыслов и комментариев, отсутствующих в оригинале. Такие правки не получится интегрировать в алгоритме автоматического перевода.
3. Сохраняйте структуру оригинального текста - например, не разбивайте одно предложение на два.
4. Не имеет смысла однотипное исправление перевода какого-то термина во всех предложениях. Исправляйте только в одном месте. Когда Вашу правку одобрят, это исправление будет алгоритмически распространено и на другие части документации.
5. По иным вопросам, например если надо исправить заблокированное для перевода слово, обратитесь к редакторам через форму технической поддержки.
