Стандартный или указанный цикл продольного привода
Блоксеть силового агрегата/Построитель сценариев транспортного средства
Блок динамики транспортного средства/Сценарии транспортного средства/Ездовой цикл и маневры
Блок источника цикла привода генерирует стандартный или заданный пользователем продольный цикл привода. Выводом блока является заданная продольная скорость транспортного средства, которую можно использовать для:
Прогнозирование крутящего момента двигателя и расхода топлива, необходимого транспортному средству для достижения желаемой скорости и ускорения для данного эталона переключения передач.
Создание реалистичных эталонных значений скорости и смещения для команд ускорения и торможения по замкнутому контуру для моделей управления транспортным средством и установки.
Изучение, настройка и оптимизация управления транспортным средством, производительности системы и надежности системы в течение нескольких циклов привода.
Выявление неисправностей в пределах допусков, установленных стандартизированными испытаниями, включая:
Графики движения динамометра EPA 1
Всемирные согласованные лабораторные испытания легких транспортных средств (ВПИМ) 2
Для циклов привода можно использовать:
Циклы привода из предопределенных источников. По умолчанию блок включает в себя FTP–75 цикл привода. Чтобы установить дополнительные циклы дисков из пакета поддержки, см. раздел Пакет поддержки для данных о маневре и цикле дисков. Опорный блок имеет приводные циклы, которые включают в себя, например, схемы переключения передач. JC08 и CUEDC.
Переменные рабочей области, определяющие собственные циклы дисков.
.mat, .xls, .xlsx, или.txt файлы.
Параметры широко открытого дросселя (WOT), включая начальную и номинальную эталонную скорость, время начала замедления и конечную эталонную скорость.
Для достижения целей, перечисленных в таблице, используйте указанные параметры блока «Источник цикла привода».
| Цель | Действие |
|---|---|
Повторите цикл дисковода, если время выполнения моделирования превышает длину цикла дисковода. | Выберите Циклическое повторение. |
Выведите ускорение, рассчитанное по дифференциации Савицки-Голая. | Выберите «Ускорение вывода». |
Укажите период выборки для дискретных приложений. | Укажите период выборки вывода (0 для непрерывного), параметр dt. |
Обновите время выполнения моделирования таким образом, чтобы оно равнялось длине цикла привода. | Щелкните Обновить время моделирования (Update simulation time). Если ссылка на конфигурацию модели существует, блок не включает эту опцию. |
Постройте график цикла привода на рисунке MATLAB ®. | Щелкните График цикла привода (Plot drive cycle) |
Укажите цикл диска с помощью переменной рабочего пространства. | Щелкните Указать переменную (Specify vari Блок:
Задайте переменную рабочего пространства так, чтобы она содержала время, скорость и, при необходимости, спецификацию переключения передач. Примеры см. в разделе Создание циклов привода с использованием переменных рабочего пространства. |
Укажите цикл диска с помощью файла. | Щелкните Выбрать файл (Select file). Блок:
Укажите файл, содержащий время, скорость и, при необходимости, спецификацию переключения передач. |
Выходной приводной механизм цикла. |
Укажите цикл привода, содержащий спецификацию переключения передач. Можно использовать:
Щелкните Выходные данные переключения передач. |
Установите дополнительные циклы дисков из пакета поддержки. | Нажмите Установить дополнительные циклы дисков. Блок включает параметр, если можно установить дополнительные циклы дисков из пакета поддержки. |
Выявление неисправностей цикла привода в пределах допусков, определенных стандартизированными тестами. | На вкладке Fault Tracking (Отслеживание неисправностей) используйте параметры для задания допусков отказов. Если скорость транспортного средства не находится в пределах допустимого диапазона скоростей, блок устанавливает состояние неисправности. |
На вкладке Fault Tracking (Отслеживание неисправностей) используйте параметры для задания допусков отказов. Если скорость или время транспортного средства не находятся в пределах допустимого диапазона, блок устанавливает условие неисправности.
| Параметр | Описание | Настройка | |
|---|---|---|---|
EPA Standard1 | Tests2 WLTP | ||
Допуск скорости | Допуск по скорости выше самой высокой точки и ниже самой низкой точки следа скорости цикла привода в пределах допуска по времени. | 2,0 миль/ч | 2,0 км/ч |
Допуск по времени | Время, которое блок использует для определения допуска скорости. | 1,0 с | 1,0 с |
| Максимальное количество отказов | Максимальное количество отказов во время цикла диска. | Не указано | 10 |
| Максимальное время единичного отказа | Максимальная продолжительность отказа. | 2,0 с | 1,0 с |
| Максимальное общее время отказа | Максимальное накопленное время, затраченное при состоянии неисправности. | Не указано | Не указано |
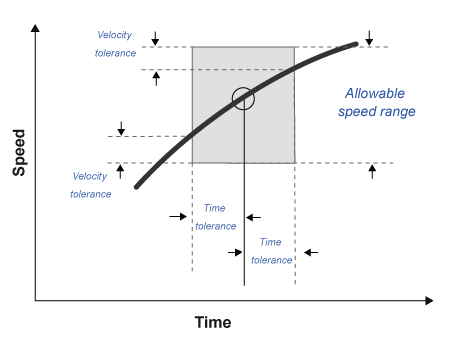
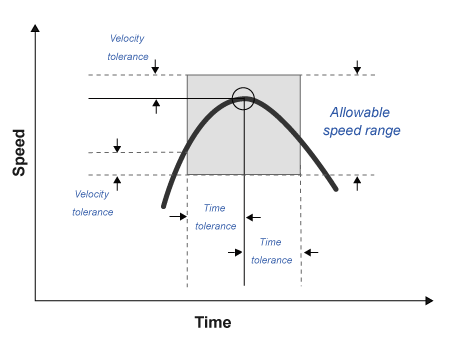
На этих рисунках показано, как блок использует допуски скорости и времени для определения допустимого диапазона скоростей.
|
|
|
Если для параметра Источник цикла привода задано значение Workspace variable, можно указать переменную рабочего пространства, определяющую цикл диска.
В этой таблице приведены примеры использования переменных рабочего пространства для создания собственных циклов дисков.
| Переменная рабочей области | Исходная единица измерения скорости | Единица измерения выходной скорости | График цикла привода |
|---|---|---|---|
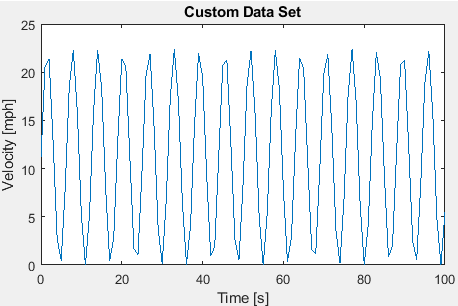
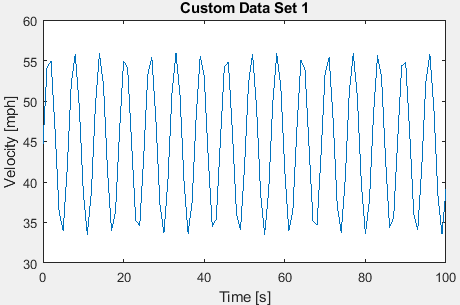
Конструкция без схемы переключения передач. Из набора рабочей области в t = 0:1:100; xdot = 5.*sin(t)+10; myCycleS.time = t'; myCycleS.signals.values = xdot'; | m/s | mph |
|
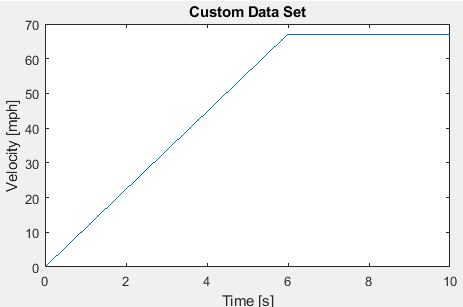
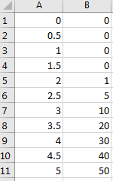
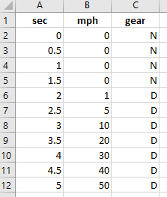
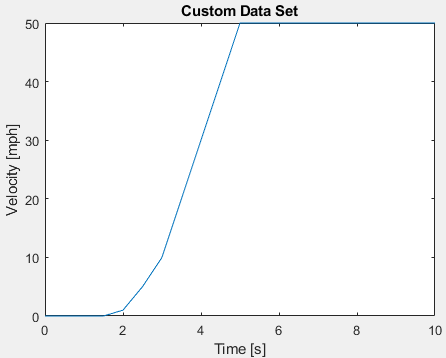
Конструкция с графиком переключения передач. Из набора рабочей области в gears=[0, 1, 2, 3, 3, 4, 4, 4, 4, 4, 4]; t=0:1:10; xdot=[0,5,10,15,20,25,30,30,30,30,30]; myCycleS.time=t'; myCycleS.signals.values=[xdot',gears']; | m/s | mph |
|
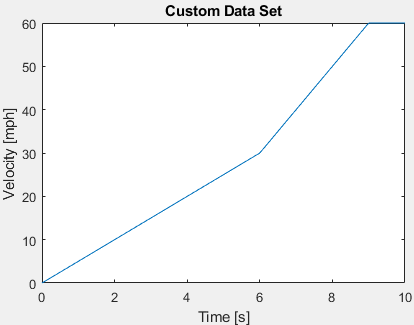
2-D массив без схемы переключения передач. Из набора рабочей области в t = 0:1:100; xdot = 5.*sin(t)+5; myCycleA = [t',xdot']; | m/s | mph |
|
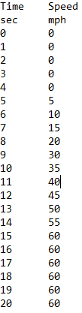
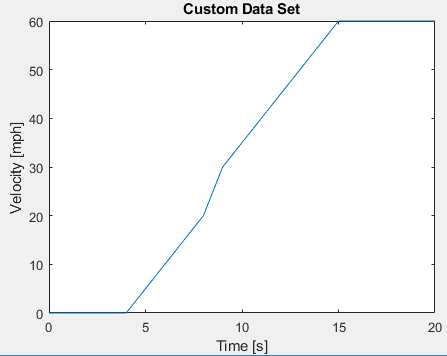
2-D массив со схемой переключения передач. Из набора рабочей области в gears=[0, 1, 2, 3, 4, 4, 4, 5, 5, 5, 5]; t=0:1:10; xdot=[0,5,10,15,20,25,30,40,50,60,60]; myCycleA=[t',xdot',gears']; | mph | mph |
|
Объект временного ряда без графика переключения передач. Из набора рабочей области в myCycleT = timeseries; t = 0:1:100; xdot = 5.*sin(t)+20; myCycleT.Data = xdot'; myCycleT.Time = t; | m/s | mph |
|
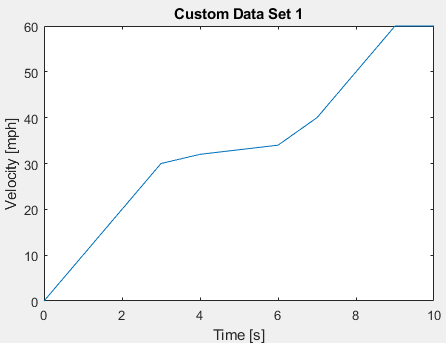
Объект временного ряда без графика переключения передач. Из набора рабочей области в myCycleT = timeseries; gears=[0, 1, 2, 3, 4, 4, 4, 5, 5, 5, 5]; t=0:1:10; xdot=[0,10,20,30,32,33,34,40,50,60,60]; myCycleT.Data = [xdot',gears']; myCycleT.Time = t'; | mph | mph |
|
Drive cycle source - Выберите источник цикла приводаFTP75 (по умолчанию) | Wide Open Throttle (WOT) | Workspace variable | .mat, .xls, .xlsx or .txt fileFTP75 - Загрузить цикл привода FTP75 из.mat файл в 1-D блок Справочной таблицы. Этот FTP75 представляет собой городской ездовой цикл, который можно использовать для определения выбросов выхлопных газов и экономии топлива легковых автомобилей. Чтобы установить дополнительные циклы дисков из пакета поддержки, см. раздел Пакет поддержки для данных о маневре и цикле дисков.
Wide Open Throttle (WOT) - Используйте параметры WOT, чтобы указать цикл диска для тестирования производительности.
Workspace variable - укажите время, скорость и, при необходимости, данные зубчатой передачи в качестве структуры, массива 2-D или объекта временного ряда.
.mat, .xls, .xlsx or .txt file - Укажите файл, содержащий данные о времени, скорости и, при необходимости, о передаче в формате столбца.
После установки дополнительных циклов можно использовать set_param для установки цикла привода. Например, для использования цикла привода US06:
set_param([gcs '/Drive Cycle Source'],'cycleVar','US06')
Таблица суммирует зависимости параметров.
| Источник цикла диска | Включает параметр |
|---|---|
Wide Open Throttle (WOT) | Время начала, t_wot1 |
Начальная опорная скорость, xdot_woto | |
Номинальная опорная скорость, xdot_wot1 | |
Время начала замедления, поз. 2 | |
Конечная опорная скорость, xdot_wot2 | |
Время моделирования WOT, t_wotend | |
Единицы измерения скорости источника | |
Workspace variable | Из рабочей области |
Единицы измерения скорости источника | |
Выходные данные переключения передач, если цикл привода включает в себя график переключения передач | |
| Исходный файл цикла диска |
| Единицы измерения скорости источника | |
Выходные данные переключения передач, если цикл привода включает в себя график переключения передач |
From workspace - Рабочее пространствоvariableМонотонное увеличение времени, скорости и, при необходимости, данных зубчатой передачи, определяемых структурой, массивом 2-D или объектом временного ряда. Введите единицы измерения для скорости в поле параметра Исходные единицы измерения скорости.
Для каждого соответствующего значения времени должна существовать допустимая точка. Невозможно указать inf, empty, или NaN.
В этой таблице приведены примеры использования переменных рабочего пространства для создания собственных циклов дисков.
| Переменная рабочей области | Исходная единица измерения скорости | Единица измерения выходной скорости | График цикла привода |
|---|---|---|---|
Конструкция без схемы переключения передач. Из набора рабочей области в t = 0:1:100; xdot = 5.*sin(t)+10; myCycleS.time = t'; myCycleS.signals.values = xdot'; | m/s | mph |
|
Конструкция с графиком переключения передач. Из набора рабочей области в gears=[0, 1, 2, 3, 3, 4, 4, 4, 4, 4, 4]; t=0:1:10; xdot=[0,5,10,15,20,25,30,30,30,30,30]; myCycleS.time=t'; myCycleS.signals.values=[xdot',gears']; | m/s | mph |
|
2-D массив без схемы переключения передач. Из набора рабочей области в t = 0:1:100; xdot = 5.*sin(t)+5; myCycleA = [t',xdot']; | m/s | mph |
|
2-D массив со схемой переключения передач. Из набора рабочей области в gears=[0, 1, 2, 3, 4, 4, 4, 5, 5, 5, 5]; t=0:1:10; xdot=[0,5,10,15,20,25,30,40,50,60,60]; myCycleA=[t',xdot',gears']; | mph | mph |
|
Объект временного ряда без графика переключения передач. Из набора рабочей области в myCycleT = timeseries; t = 0:1:100; xdot = 5.*sin(t)+20; myCycleT.Data = xdot'; myCycleT.Time = t; | m/s | mph |
|
Объект временного ряда без графика переключения передач. Из набора рабочей области в myCycleT = timeseries; gears=[0, 1, 2, 3, 4, 4, 4, 5, 5, 5, 5]; t=0:1:10; xdot=[0,10,20,30,32,33,34,40,50,60,60]; myCycleT.Data = [xdot',gears']; myCycleT.Time = t'; | mph | mph |
|
Чтобы включить этот параметр, выберите Workspace variable от источника цикла привода.
Drive cycle source file - Имя файла.mat, .xls, .xlsx or .txtФайл, содержащий монотонно увеличивающееся время, скорость и, при необходимости, зубчатое колесо в формате столбца или запятой. Блок игнорирует единицы измерения в файле. Введите единицы измерения для скорости в поле параметра Исходные единицы измерения скорости.
| Файл | Исходная единица измерения скорости | Единица измерения выходной скорости | График цикла привода |
|---|---|---|---|
Один.
| mph | mph |
|
Один.
| mph | mph |
|
A.
| mph | mph |
|
Если расписание передач представлено с использованием P, R, N, D, L, OD, блок отображает передачи в целые числа.
|
Механизм |
Целое число |
|---|---|
|
P |
|
|
R |
|
|
N |
|
|
L |
|
|
D |
|
|
ПЕРЕДОЗИРОВКА |
Следующее целое число после наивысшей заданной передачи. |
Например, блок преобразует спецификацию передач P P N L D 3 4 5 6 5 4 5 6 7 OD 7 кому 80 80 0 1 2 3 4 5 6 5 4 5 6 7 8 7.
Чтобы включить этот параметр, выберите .mat, .xls, .xlsx or .txt file от источника цикла привода.
Repeat cyclically - Повторить цикл приводаoff (по умолчанию) | onПовторите цикл дисковода, если время выполнения моделирования превышает продолжительность цикла дисковода.
Output acceleration - Вывод ускоренияoff (по умолчанию)Для вычисления ускорения блок реализует дифференциацию Савицки - Голая с помощью многочлена второго порядка с трёхзаборным точечным фильтром.
Для создания выходного порта ускорения выберите «Выходное ускорение». При выборе параметра «Ускорение вывода» включается параметр «Единицы ускорения вывода».
Output gear shift data - Вывести зубчатое колесоoff (по умолчанию) | on
Укажите цикл привода, содержащий спецификацию переключения передач. Можно использовать:
Пакет поддержки для установки стандартных циклов привода, включающих, например, схемы переключения передач JC08 и CUEDC.
Переменные рабочей области.
.mat, .xls, .xlsx, или.txt файлы.
При выборе этого параметра создается входной порт Зубчатое колесо (Gear).
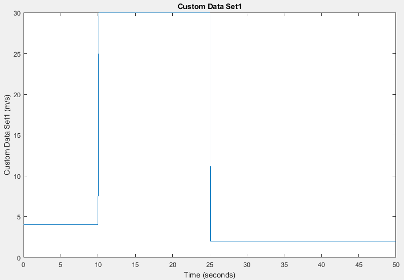
Start time, t_wot1 - Время начала цикла привода5 (по умолчанию) | scalarВремя начала цикла привода, в. Например, на этом графике показан цикл привода с временем начала, равным 10 s.
Чтобы включить этот параметр, выберите параметр Источник цикла привода Wide Open Throttle (WOT).
Initial reference speed, xdot_woto - Скорость0 (по умолчанию) | scalarНачальная опорная скорость в единицах измерения, заданных параметром Исходные единицы измерения скорости (Source velocity units). Например, на этом графике показан цикл привода с начальной опорной скоростью, равной 4 м/с.
Чтобы включить этот параметр, выберите параметр Источник цикла привода Wide Open Throttle (WOT).
Nominal reference speed, xdot_wot1 - Скорость30 (по умолчанию) | scalarНоминальная опорная скорость в единицах измерения, заданных параметром Исходные единицы измерения скорости (Source velocity units). Например, на этом графике показан цикл привода с номинальной опорной скоростью 30 м/с.
Чтобы включить этот параметр, выберите параметр Источник цикла привода Wide Open Throttle (WOT).
Time to start deceleration, wot2 - Время20 (по умолчанию) | scalarВремя начала замедления транспортного средства, например, на этом графике показан цикл движения с замедлением транспортного средства, начинающимся с 25 s.
Чтобы включить этот параметр, выберите параметр Источник цикла привода Wide Open Throttle (WOT).
Final reference speed, xdot_wot2 - Скорость0 (по умолчанию) | scalarКонечная опорная скорость в единицах измерения, заданных с помощью параметра Исходные единицы измерения скорости (Source velocity units). Например, на этом графике показан цикл привода с конечной опорной скоростью, равной 2 м/с.
Чтобы включить этот параметр, выберите параметр Источник цикла привода Wide Open Throttle (WOT).
WOT simulation time, t_wotend - Время30 (по умолчанию) | scalarВремя моделирования цикла привода WOT, в. Например, на этом графике показан цикл привода с временем моделирования, равным 50 s.
Чтобы включить этот параметр, выберите параметр Источник цикла привода Wide Open Throttle (WOT).
Source velocity units - Укажите единицы измерения скоростиm/s (по умолчанию)Единицы входной скорости.
Чтобы включить этот параметр, выберите параметр Источник цикла привода Wide Open Throttle (WOT), Workspace variable, или .mat, .xls, .xlsx or .txt file.
Output velocity units - Укажите единицы измерения скоростиm/s (по умолчанию)Единицы выходной скорости.
Output acceleration units - Укажите единицы ускоренияm/s^2 (по умолчанию)Укажите единицы выходного ускорения.
Чтобы включить этот параметр, выберите «Ускорение вывода».
Output sample period (0) for continuous - Частота выборки0 (по умолчанию) | scalarЧастота выборки. Установить в значение 0 для непрерывного периода выборки. Для дискретного периода укажите ненулевую скорость.
Enable fault tracking - Включить отслеживание неисправностейoff (по умолчанию) | onВыберите этот параметр, чтобы включить отслеживание сбоев цикла диска. Используйте параметры, чтобы указать отказоустойчивость. Если скорость транспортного средства не находится в пределах допустимого диапазона скоростей, блок устанавливает состояние неисправности.
При выборе этого параметра активируются следующие параметры:
Допуск скорости, velBnd
Единицы измерения допусков скорости, velBndUnit
Единицы обратной связи по скорости, inUnit
Допуск по времени, timeBnd
Speed tolerance, velBnd - Допуск скорости цикла привода2.0 (по умолчанию) | scalarДопуск по скорости выше самой высокой точки и ниже самой низкой точки отслеживания скорости цикла привода в пределах допуска по времени. Если скорость транспортного средства не находится в пределах допустимого диапазона скоростей, блок устанавливает состояние неисправности. Для допусков, указанных в стандартизированных тестах, используйте следующие настройки:
Графики движения динамометров EPA - 2.0
Тесты WLTP - 2.0
На этих рисунках показано, как блок использует допуски скорости и времени для определения допустимого диапазона скоростей.
|
|
|
Чтобы включить этот параметр, на вкладке Fault Tracking выберите Enable fault tracking.
Speed tolerance units, velBndUnit - Установить единицыmph (по умолчанию)Единицы измерения допусков скорости. Для единиц, указанных в стандартизированных тестах, используйте следующие единицы:
Графики движения динамометров EPA - m/s
Тесты WLTP - km/h
Чтобы включить этот параметр, на вкладке Fault Tracking выберите Enable fault tracking.
Velocity feedback units, inUnit - Установка единиц обратной связи по скоростиm/s (по умолчанию)Единицы обратной связи по скорости. Установите значение в поле VelFdbk блоки сигналов входных портов.
Чтобы включить этот параметр, на вкладке Fault Tracking выберите Enable fault tracking.
Time tolerance, timeBnd - Допуск по времени1.0 (по умолчанию) | scalarВремя, которое блок использует для определения допуска скорости. Если скорость транспортного средства не находится в пределах допустимого диапазона скоростей, блок устанавливает состояние неисправности. Для допусков по времени, указанных в стандартизированных тестах, используйте следующие настройки:
Графики движения динамометров EPA - 1.0
Тесты WLTP - 1.0
На этих рисунках показано, как блок использует допуски скорости и времени для определения допустимого диапазона скоростей.
|
|
|
Чтобы включить этот параметр, на вкладке Fault Tracking выберите Enable fault tracking.
Enable failure tracking - Включить отслеживание ошибокoff (по умолчанию) | onВыберите этот параметр, чтобы включить отслеживание сбоев цикла диска.
Для включения этого параметра выберите Enable fault tracking. Выбор параметра Enable failure tracking включает следующие параметры:
Остановка моделирования при сбое трассировки, stopSim
Максимальное количество отказов, maxFureCnt
Максимальное время единичного отказа, maxFureTime
Максимальное общее время отказа, maxTotFureTime
Maximum number of faults, maxFaultCnt - Максимальное количество неисправностей10 (по умолчанию) | scalarМаксимальное количество отказов во время цикла диска. Для номера, указанного в стандартизированных тестах, используйте следующие настройки:
Графики движения динамометра EPA - Не указаны
Тесты WLTP - 10
Если количество отказов превышает максимальное количество отказов, блок устанавливает отказ.
Чтобы включить этот параметр, на вкладке Fault Tracking выберите Enable failure tracking.
Maximum single fault time, maxFaultTime - Максимальная продолжительность одиночного отказа2.0 (по умолчанию) | scalarМаксимальная продолжительность одиночного отказа, в с. В течение времени, указанного в стандартизированных тестах, используйте следующие настройки:
Графики движения динамометров EPA - 2.0
Тесты WLTP - 1.0
Если продолжительность отказа превышает максимальное время единичного отказа, блок устанавливает отказ.
Чтобы включить этот параметр, на вкладке Fault Tracking выберите Enable failure tracking.
Maximum total fault time, maxTotFaultTime - Максимальное общее время отказа15.0 (по умолчанию) | scalarМаксимальное накопленное время, затраченное при состоянии неисправности, в с.
Если накопленное время, затраченное при состоянии отказа, превышает максимальное общее время отказа, блок устанавливает отказ.
Чтобы включить этот параметр, на вкладке Fault Tracking выберите Enable failure tracking.
Display simulation trace - Отображать трассировку скоростиoff (по умолчанию) | onВыберите этот параметр для отображения окна трассировки скорости. Выбор этого параметра может замедлить время моделирования.
При выборе этого параметра активируются следующие параметры:
Скорость обновления трассировки моделирования, dtTrace
Окно отображения трассировки моделирования, treyWindow
Simulation trace update rate, dtTrace - Скорость обновления трассировки1 (по умолчанию) | scalarСкорость обновления трассировки моделирования, в поле s. Установите значение 0 для непрерывного периода выборки. Для дискретного периода укажите ненулевую скорость.
Для включения этого параметра на вкладке Fault Tracking выберите Display simulation trace.
Simulation trace display window, traceWindow - Частота обновления окна трассировки10 (по умолчанию) | scalarСкорость обновления окна трассировки моделирования, в с.
Для включения этого параметра на вкладке Fault Tracking выберите Display simulation trace.
[1] Агентство по охране окружающей среды (АООС). График движения городского динамометра EPA. 40 CFR 86.115-78, 1 июля 2001 г.
[2] Комиссия Европейского союза. «Допуски трассировки скорости». Регламент Комиссии Европейского союза. 32017R1151, с. 1.2.6.6, 1 июня 2017 г.