В этом примере показано, как выполнять маневр динамики транспортного средства в 3D среде. Интегрируя модели динамики транспортных средств с 3D средой, вы можете протестировать передовые системы помощи водителю (ADAS) и автоматизированное восприятие вождения (AD), планирование и программное обеспечение управления. Требования к платформе модуля визуализации 3D и рекомендации по аппаратному обеспечению см. в разделе Требования и ограничения модуля визуализации 3D.
Создание и открытие рабочей копии справочного приложения для маневра. Например, откройте приложение ссылки на изменение в двухполосном режиме.
Запустите имитацию маневра. По умолчанию среда 3D отключена.
При выполнении моделирования подсистема визуализации предоставляет информацию о водителе, транспортном средстве и ответе. Эталонное приложение регистрирует сигналы транспортного средства во время маневра, включая рулевое управление, скорость транспортного средства и двигателя и боковое ускорение. Для импорта зарегистрированных сигналов и проверки данных можно использовать инспектор данных моделирования.
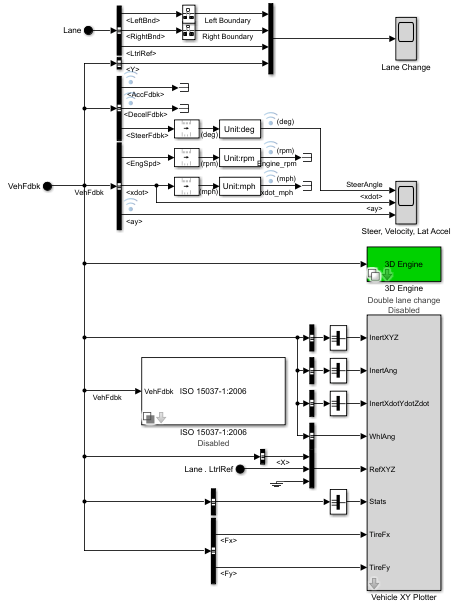
| Элемент | Описание |
|---|---|
Команды драйвера | Команды драйвера:
|
Реакция транспортного средства | Реакция транспортного средства:
|
Блок «Изменение полосы движения» | Боковое смещение транспортного средства в зависимости от времени:
|
Блок управления, Velocity, Lat Accel Scope |
|
Плоттер XY транспортного средства | Продольное и боковое расстояние транспортного средства |
ISO 15037-1: 2006 блок | Отображение стандартных сигналов измерений ISO в инспекторе данных моделирования, включая угол и крутящий момент рулевого колеса, продольную и боковую скорость, а также угол бокового скольжения |
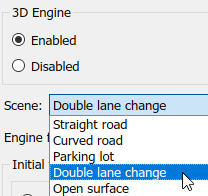
Включите среду визуализации 3D. В подсистеме визуализации откройте блок 3D Engine. Установите эти параметры.
3D Обработчик в состояние Включено.
Описание сцены для одной из сцен, например Double lane change.
Для позиционирования транспортного средства в месте происшествия:
Выберите метод инициализации позиции:
Рекомендуется для сцены - установка исходного положения транспортного средства на значения, рекомендуемые для сцены
User-specified - Установка собственного исходного положения транспортного средства
Щелкните Обновить рабочие пространства модели начальными значениями, чтобы заменить исходное положение транспортного средства в рабочих пространствах модели примененными значениями.
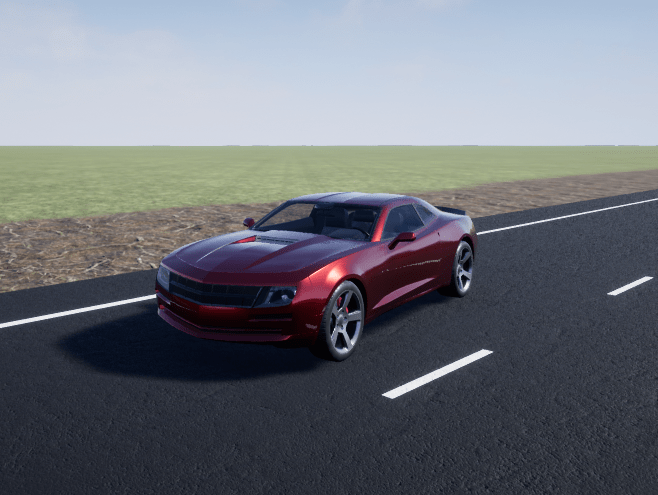
Повторно запустите приложение-ссылку. По мере выполнения моделирования в AutoVrtlEnv просмотрите ответ транспортного средства.
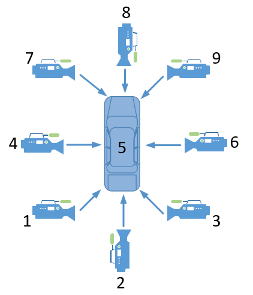
Для плавного изменения вида камеры используйте следующие ключевые команды.
| Ключ | Просмотр камеры | |
|---|---|---|
1 | Задняя левая |
|
2 | Назад | |
3 | Назад направо | |
4 | Левый | |
5 | Внутренний | |
6 | Правильно | |
7 | Спереди слева | |
8 | Фронт | |
9 | Спереди справа | |
0 | Наверху | |
Для дополнительных элементов управления камеры используйте следующие ключевые команды.
| Ключ | Управление камерой |
|---|---|
| Счет | Циклический просмотр между всеми транспортными средствами в сцене. |
Колесо прокрутки мыши | Управление расстоянием камеры от транспортного средства. |
L | Включение или отключение эффекта запаздывания камеры. При включении эффекта запаздывания вид камеры включает:
Это отставание позволяет улучшить визуализацию общего ускорения и вращения транспортного средства. |
| F | Включение или выключение режима свободной камеры. При включении режима свободной камеры можно с помощью мыши изменить шаг и рыскание камеры. Этот режим позволяет вращать камеру вокруг аппарата. |
Например, при выполнении двухполосного маневра изменения, используйте камеры для визуализации транспортного средства при изменении полос движения.
Назад

Спереди слева
Внутренний

Примечание
Чтобы открыть и закрыть AutoVrtlEnv используйте кнопки Simulink ® Run и Stop. При закрытии вручную AutoVrtlEnv Simulink останавливает моделирование с ошибкой.
Если включена среда визуализации 3D, нельзя вернуться к моделированию.