Обнаружение объектов с помощью алгоритма Виолы-Джонса
Каскадный детектор объектов использует алгоритм Виолы-Джонса для обнаружения лиц, носов, глаз, рта или верхней части тела людей. Можно также использовать метку изображения для подготовки пользовательского классификатора к использованию с данным объектом System. Дополнительные сведения о работе функции см. в разделе Начало работы с каскадным детектором объектов.
Для обнаружения элементов лица или верхней части тела на изображении:
Создать vision.CascadeObjectDetector и задайте его свойства.
Вызовите объект с аргументами, как если бы это была функция.
Дополнительные сведения о работе системных объектов см. в разделе Что такое системные объекты?.
detector = vision.CascadeObjectDetector
detector = vision.CascadeObjectDetector( создает детектор, сконфигурированный для обнаружения объектов, определенных вектором входных символов, model)model.
detector = vision.CascadeObjectDetector( создает детектор и настраивает его для использования пользовательской модели классификации, указанной в XMLFILE)XMLFILE вход.
detector = vision.CascadeObjectDetector(Name,Value)detector = vision.CascadeObjectDetector('ClassificationModel','UpperBody')
Чтобы использовать функцию объекта, укажите object™ System в качестве первого входного аргумента. Например, для освобождения системных ресурсов объекта System с именем obj, используйте следующий синтаксис:
release(obj)
Создание объекта-детектора граней.
faceDetector = vision.CascadeObjectDetector;
Прочтите входное изображение.
I = imread('visionteam.jpg');Обнаружение граней.
bboxes = faceDetector(I);
Аннотирование обнаруженных граней.
IFaces = insertObjectAnnotation(I,'rectangle',bboxes,'Face'); figure imshow(IFaces) title('Detected faces');

Создайте объект-детектор тела и задайте свойства.
bodyDetector = vision.CascadeObjectDetector('UpperBody');
bodyDetector.MinSize = [60 60];
bodyDetector.MergeThreshold = 10;Считывание входного изображения и обнаружение верхнего корпуса.
I2 = imread('visionteam.jpg');
bboxBody = bodyDetector(I2);Аннотировать обнаруженные верхние тела.
IBody = insertObjectAnnotation(I2,'rectangle',bboxBody,'Upper Body'); figure imshow(IBody) title('Detected upper bodies');

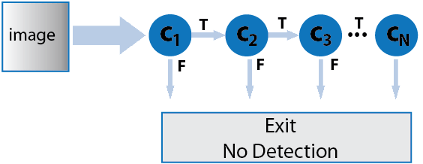
Этот объект использует каскад классификаторов для эффективной обработки областей изображения для присутствия целевого объекта. Каждый этап каскада применяет всё более сложные двоичные классификаторы, что позволяет алгоритму быстро отбраковывать области, не содержащие цели. Если требуемый объект не найден ни на одном этапе каскада, детектор немедленно отклоняет область и обработка завершается. Завершая работу, объект избегает вызова интенсивных для вычислений классификаторов дальше вниз по каскаду.
Детектор постепенно масштабирует входное изображение для определения местоположения целевых объектов. При каждом приращении масштаба скользящее окно, размер которого совпадает с размером обучающего изображения, сканирует масштабированное изображение для поиска объектов. ScaleFactor свойство определяет величину масштабирования между последовательными приращениями.
Размер области поиска связан с ScaleFactor следующим образом:
область поиска = round((ObjectTrainingSize) * (ScaleFactorN))
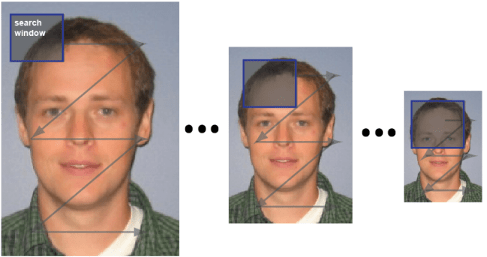
Окно поиска пересекает изображение для каждого масштабированного приращения.
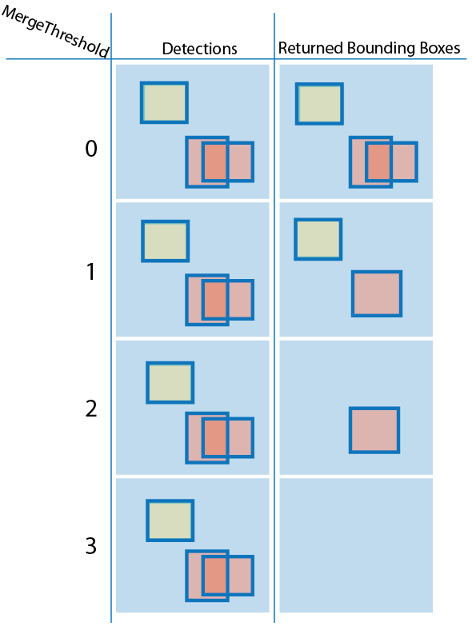
Для каждого приращения масштаба окно поиска пересекает изображение, создавая множество обнаружений вокруг целевого объекта. Несколько обнаружений объединяются в одну ограничительную рамку для каждого целевого объекта. Вы можете использовать MergeThreshold для управления количеством обнаружений, необходимых перед объединением или отклонением обнаружений. Размер конечной ограничивающей рамки представляет собой среднее значение размеров ограничивающих рамок для отдельных обнаружений и лежит между ними. MinSize и MaxSize.
[1] Лиенхарт Р., Куранов А. и В. Писаревский «Эмпирический анализ каскадов обнаружения усиленных классификаторов для быстрого обнаружения объектов». Материалы 25-го симпозиума ДАГМ по распознаванию образов. Магдебург, Германия, 2003 год.
[2] Оджала Тимо, Пиетикяйнен Матти и Мяенпя Топи, «Мультирастворительный серый масштаб и инвариантная классификация текстур с локальными бинарными шаблонами». В IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002. Том 24, выпуск 7, стр. 971-987.
[3] Круппа Х., Кастрильон-Сантана М. и Б. Шиле. «Быстрый и надежный поиск лица через локальный контекст». Материалы Совместного международного рабочего совещания ИЭЭЭ по визуальному наблюдению и оценке эффективности отслеживания и наблюдения, 2003 год, стр. 157-164.
[4] Кастрильон Марко, Деннис Оскар, Герра Кайетано и Эрнандес Марио, «ENCARA2: Обнаружение в реальном времени нескольких лиц при разных разрешениях в видеопотоках». В журнале визуальной коммуникации и представления изображений, 2007 (18) 2: стр. 130-140.
[5] Ю Шики «Обнаружение глаз». Домашняя страница Шики Ю. http://yushiqi.cn/research/eyedetection.
[6] Виола, Пол и Майкл Дж. Джонс, «Быстрое обнаружение объектов с использованием усиленного каскада простых функций», Материалы конференции IEEE Computer Society 2001 по компьютерному зрению и распознаванию образов, 2001. Объем: 1, стр. 511-518.
[7] Далал, Н. и Б. Триггеры, «Гистограммы ориентированных градиентов для обнаружения человека». Конференция компьютерного общества IEEE по компьютерному зрению и распознаванию образов. Том 1, (2005), стр. 886-893.
[8] Ojala, T., M. Pietikainen и T. Maenpaa, «Multisolution Gray-scale and Rotation Invariant Texture Classification with Local Binary Patterns». Транзакции IEEE по анализу шаблонов и машинному интеллекту. Том 24, № 7 июля 2002 года, стр. 971-987.
Маркировщик изображений | insertShape | integralImage | trainCascadeObjectDetector | vision.PeopleDetector
