Преобразование изображения с фронтальной камеры в вид сверху вниз
Панель инструментов Vision HDL/геометрические преобразования
Блок Birds-Eye View деформирует изображение с камеры, обращенное спереди, в вид сверху вниз. Она использует аппаратно эффективную архитектуру, которая поддерживает генерацию кода HDL.
Необходимо указать матрицу гомографии, описывающую преобразование. Эта матрица может быть вычислена на основе физических свойств камеры или эмпирически получена путем анализа изображения узора сетки, сделанного камерой. Блок использует матрицу для вычисления преобразованных координат каждого пикселя. Преобразование не интерполируется между местоположениями пикселей. Вместо этого результат округляется до ближайшей координаты.
Блок работает на трапециевидной области входного изображения ниже точки исчезновения. Эти изображения показывают область ввода, выбранную для преобразования, и результирующий вид сверху вниз.

Можно указать количество линий в преобразованной области и размер выходного кадра. Если указанная матрица гомографии не может сопоставить запрошенное количество строк с запрошенным размером вывода, блок возвращает предупреждение.
Поскольку блок реплицирует строки из области ввода для создания большего выходного кадра, он не может завершить преобразование одного кадра до прихода следующего кадра. Блок игнорирует любые новые входные кадры при преобразовании предыдущего кадра. Поэтому в зависимости от сохраненных строк и размера вывода блок может сбрасывать входные кадры. Эта синхронизация также позволяет блоку поддерживать интервалы гашения входного потока пикселей.
Этот блок использует потоковый пиксельный интерфейс с pixelcontrol шина для сигналов управления кадрами. Этот интерфейс позволяет блоку работать независимо от размера и формата изображения. Все блоки Vision HDL Toolbox™ используют один и тот же потоковый интерфейс. Блок принимает и возвращает значение скалярного пикселя и шину, которая содержит пять управляющих сигналов. Сигналы управления указывают достоверность каждого пикселя и его местоположение в кадре. Чтобы преобразовать кадр (матрицу пикселей) в последовательный поток пикселей и управляющие сигналы, используйте блок «От кадра к пикселям». Полное описание интерфейса см. в разделе Потоковый пиксельный интерфейс.
Преобразование из входной пиксельной координаты (x, y) в пиксельную координату птичьего глаза получают из матрицы гомографии h. Матрица гомографии основана на физических параметрах и поэтому является константой для конкретной установки камеры.
+ h23h31x + h32y + h33)
Реализация преобразования птичьего глаза в аппаратном обеспечении напрямую не выполняет этот расчет. Вместо этого блок предварительно вычисляет таблицы поиска для горизонтальных и вертикальных аспектов преобразования.
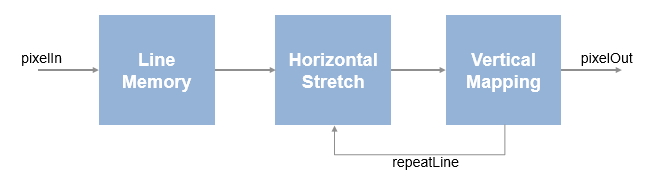
Сначала блок сохраняет входные строки, начиная с предварительно вычисленной точки схода. Сохраненные пиксели образуют трапецию с короткими линиями вблизи точки исчезновения и более широкими линиями около камеры. В этом хранилище используется максимальный размер буфера (в пикселах).
Горизонтальная таблица поиска содержит параметры интерполяции, которые описывают растяжение каждой строки трапециевидной входной области до требуемой ширины выходного кадра. Линии, которые падают ближе к точке схода, растягиваются больше, чем линии ближе к камере.
Вертикальная таблица поиска содержит отображение координат y, и сколько раз каждая строка повторяется для заполнения требуемой высоты выходного кадра. Рядом с точкой схода одна входная линия отображает множество выходных линий, в то время как каждая линия ближе к камере отображает уменьшающееся количество выходных линий.
Таблицы подстановки используют 3 * количество входных строк для буферизации ячеек памяти.
estimateGeometricTransform (Панель инструментов компьютерного зрения) | imwarp(Панель инструментов обработки изображений)
