Simulink® продукт является программным окружением для моделирования, симуляции и анализа динамических систем. Попробуйте создать простую модель, которая управляет приводом с синусоидой и отображает положение привода, наложенное на синусоиду.
Примечание
Если вы предпочитаете открывать полную модель, показанную ниже, вместо создания, введите aeroblktutorial в MATLAB® командная строка.
В следующем разделе (Создание модели) объясняется, как создать модель в Windows® платформы. Можно использовать эту же процедуру для создания модели на Linux® платформы.
В разделе описывается, как создать модель. Он не описывает, как задать параметры конфигурации для модели. Смотрите Задать параметры конфигурации модели для модели. В этом разделе описывается диалоговое окно Параметры конфигурации для моделей. Если вы не устанавливаете какие-либо параметры конфигурации, симуляция моделей может вызвать предупреждения, такие как:
Warning: Using a default value of 0.2 for maximum step size. The simulation step size will be equal to or less than this value. You can disable this diagnostic by setting 'Automatic solver parameter selection' diagnostic to 'none' in the Diagnostics page of the configuration parameters dialog
Чтобы создать новую пустую модель и открыть браузер библиотеки Simulink:
На вкладке Home MATLAB нажмите Simulink. На начальной странице Simulink щелкните Шаблон Пустой модели (Blank Model), а затем щелкните Создать модель (Create Model).
Чтобы открыть браузер библиотек, нажмите кнопку браузера.
Добавьте блок Sine Wave к модели.
Нажмите «Источники» в браузере библиотек, чтобы просмотреть блоки в библиотеке источников Simulink.
Перетащите блок Sine Wave из библиотеки Sources в окно новой модели.
Добавьте блок Linear Second-Order Actuator к модели.
Щелкните![]() символ рядом с Aerospace Blockset в браузере библиотек, чтобы развернуть иерархический список аэрокосмических блоков.
символ рядом с Aerospace Blockset в браузере библиотек, чтобы развернуть иерархический список аэрокосмических блоков.
В развернутом списке выберите «Приводы», чтобы просмотреть блоки в библиотеке приводов.
Перетащите блок Линейный привод второго порядка в окно модели.
Добавьте блок Mux к модели.
Чтобы просмотреть блоки в библиотеке Сигналов Simulink & Systems, нажмите кнопку «Маршрутизация сигналов» в браузере библиотек.
Перетащите блок Mux из библиотеки Signal Routing в окно модели.
Добавьте блок Scope к модели.
Нажмите «Раковины» в браузере библиотек, чтобы просмотреть блоки в библиотеке раковин Simulink.
Перетащите блок Scope из библиотеки Sinks в окно модели.
Измените размер блока Mux в модели.
Щелкните блок Mux, чтобы выбрать блок.
Удерживая нажатой кнопку мыши, перетащите угол блока Mux, чтобы изменить размер блока.
Соедините блоки.
Поместите указатель рядом с выходом портом блока Sine Wave. Удерживая нажатой кнопку мыши, перетащите линию, которая появляется до тех пор, пока она не соприкоснется с входным портом блока Линейный привод второго порядка. Отпустите кнопку мыши.
Используя тот же метод, соедините выход блока Линейного привода второго порядка со вторым входным портом блока Mux.
Используя тот же метод, соедините выход блока Mux с входом портом блока Возможностей.
Поместите указатель рядом с первым входным портом блока Mux. Удерживайте нажатой кнопку мыши и перетащите линию, которая появляется над линией, из выходного порта блока Sine Wave, пока не появятся двойные перекрестия. Отпустите кнопку мыши. Линии соединяются, когда узел присутствует на их пересечении.
Установите параметры блоков.
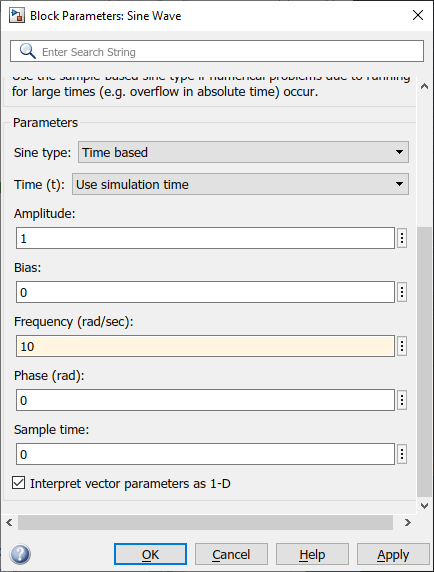
Дважды кликните блок Sine Wave. Появившееся диалоговое окно позволяет вам задать параметры блока.
В данном примере сконфигурируйте блок, чтобы сгенерировать синусоиду 10 рад/с путем ввода 10 для параметра Frequency. Синусоида имеет амплитуду по умолчанию 1 и фаза 0 задается параметрами Amplitude и Phase offset.
Нажмите кнопку ОК.
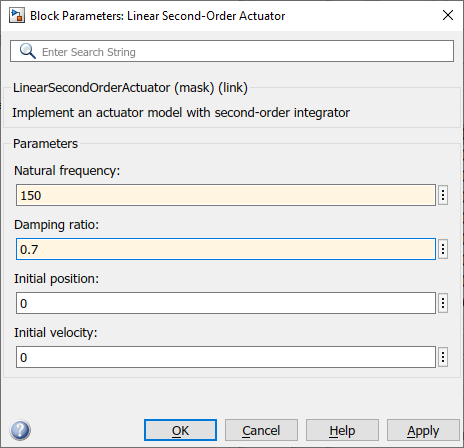
Дважды кликните блок Линейный привод второго порядка.
В этом примере привод имеет естественную частоту по умолчанию 150 рад/с, коэффициент затухания 0.7, и начальное положение 0 радианы, заданные параметрами Естественная частота, Коэффициент затухания и Начальное положение.
Нажмите кнопку ОК.
Теперь можно запустить модель, которую вы создали, чтобы увидеть, как система ведет себя во времени:
Дважды кликните блок Scope, если окно Scope еще не открыто на экране. Появится окно Scope.
Выберите Запуск из меню Симуляции в окне модели. Сигнал, содержащий синусоиду 10 рад/с и сигнал, содержащий положение привода, нанесены на возможности.
Настройте отображение блока Scope. Во время симуляции щелкните правой кнопкой по оси Y возможностей и выберите Автошкала. Вертикальная область значений возможностей регулируется, чтобы лучше соответствовать сигналу.
Измените параметры блоков Sine Wave.
Во время симуляции дважды кликните блок Sine Wave, чтобы открыть диалоговое окно его параметра.
Затем можно изменить частоту синусоиды. Попробуйте войти 1 или 20 в поле Frequency. Закройте диалоговое окно Sine Wave, чтобы ввести изменение. Затем можно наблюдать изменения на возможностях.
Выберите Stop из меню Simulation, чтобы остановить симуляцию.
Многие параметры не могут быть изменены во время симуляции. Обычно это относится к параметрам, которые прямо или косвенно изменяют размерности сигнала или частоту дискретизации. Однако существуют некоторые параметры, такие как параметр Sine Wave Frequency, которые можно настроить, не останавливая симуляцию.
Можно также изменить и запустить симуляцию Simulink из скрипта. Делая это, можно автоматизировать изменение параметров модели, чтобы исследовать большое количество условий симуляции быстро и эффективно. Для получения информации о том, как это сделать, смотрите Запуск симуляций программно.
