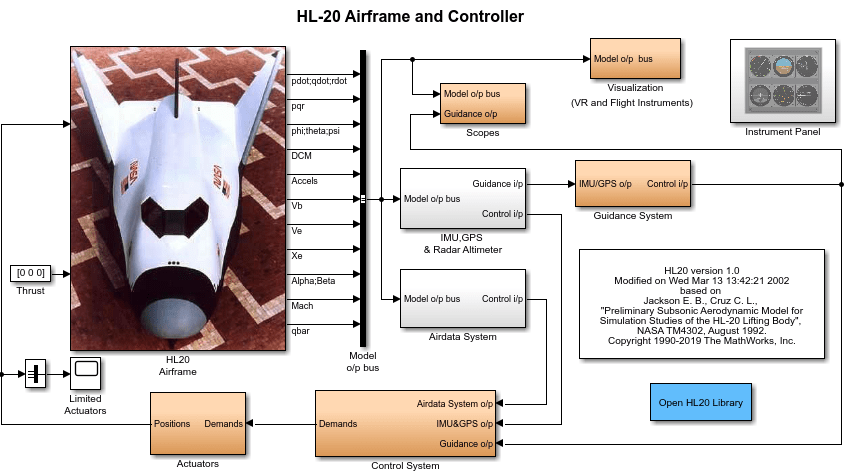
Это тематическое исследование моделирует планер HL-20 тела НАСА, недорогого дополнения к орбитальному аппарату Space Shuttle. HL-20 не заполнен, но модель включает в себя и планер, и контроллер.
Для большинства систем управления полетом, планер или модель объекта управления должны быть смоделированы, моделированы и проанализированы. В идеале этот планер должен быть смоделирован быстро, повторно используя блоки или структуру модели, чтобы уменьшить время валидации и оставить больше времени доступным для разработки системы управления. В этом исследовании программное обеспечение Aerospace Blockset™ эффективно модели фрагментов из HL-20 планера. Остальные фрагменты, включая вычисление аэродинамических коэффициентов, моделируются Simulink® программное обеспечение. В этом тематическом исследовании рассматривается модель планера HL-20 и затрагивается, как аэродинамические данные используются в модели.
HL-20, также известная как Система Запуска Персонала (PLS), представляет собой транспортное средство повторного входа подъемного тела, разработанный для дополнения орбитального аппарата Космического Челнока. Первоначально он был разработан как недорогое решение для перехода на низкую околоземную орбиту и обратно. Он может перевозить до 10 человек и ограниченный груз [1].
HL-20 подъемное тело может быть помещено на орбиту либо путём запуска его вертикально с помощью ракет-носителей, либо путём транспортировки в заливе полезной нагрузки орбитального аппарата Space Shuttle. Подъёмный корпус HL-20 сходит с орбиты с помощью небольшой бортовой двигательной установки. Его профиль повторного входа является носом первым, горизонтальным и необработанным.
Вид сверху HL-20 подъемного тела (Фото: НАСА Лэнгли)
HL-20 проекта имеет ряд преимуществ:
Быстрый поворот между посадкой и запуском снижает эксплуатационные затраты.
У HL-20 исключительная безопасность рейсов.
Он может приземляться обычно на взлетно-посадочных полосах самолетов.
Потенциальные применения HL-20 включают
Орбитальное спасение застрявших космонавтов
Обмен экипажами Международной космической станции
Миссии по наблюдению
Миссии спутникового обслуживания
Хотя программа HL-20 в настоящее время не активна, аэродинамические данные из HL-20 испытаний используются в текущих проектах НАСА [2].
Можно открыть HL-20 планер и модели контроллеров путем ввода aeroblk_HL20 в MATLAB® командная строка.
Предварительные аэродинамические данные по HL-20 грузоподъемному телу взяты из документа НАСА TM4302 [1].
Модель планера включает несколько ключевых допущений и ограничений:
Планер принят твердым и имеет постоянную массу, центр тяжести и инерцию, поскольку модель представляет собой только незаполненный фрагмент повторного входа миссии.
HL-20 принято в качестве бокового симметричного транспортного средства.
Эффекты сжимаемости (Mach) приняты незначительными.
Эффективность управления принимается нелинейной с углом атаки и линейной с углом отклонения. Эффективность управления не зависит от угла боковой кромки.
Нелинейная аэродинамическая модель с шестью степенями свободы является представлением ранней версии HL-20. Поэтому модель не предназначена для реалистичной симуляции эффективности более поздних версий HL-20.
Типичная модель планера состоит из ряда компонентов, таких как
Уравнения движения
Модели окружающей среды
Вычисление аэродинамических коэффициентов, сил и моментов
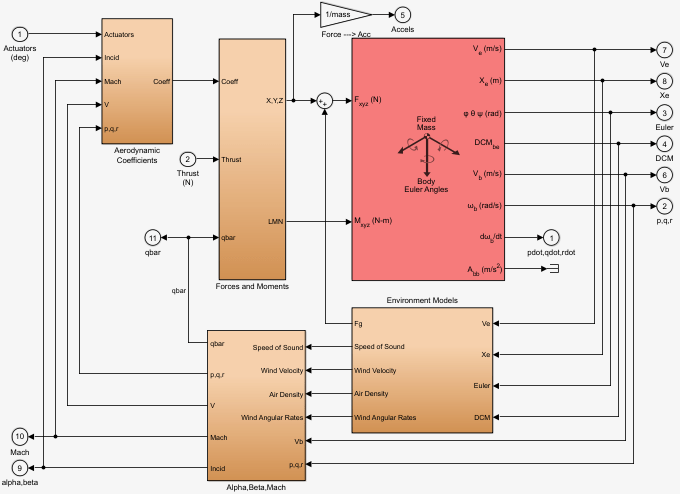
Подсистема планера модели HL-20 содержит пять подсистем, которые моделируют типичные компоненты планера:
Подсистема 6DOF (Углы Эйлера) содержит уравнения движения шести степеней свободы для планера. В подсистеме 6DOF (Углы Эйлера) отношение тела распространяется во времени с помощью представления угла Эйлера. Эта подсистема является одним из уравнений блоков движения из библиотеки Aerospace Blockset. Также доступно представление кватерниона. Смотрите 6DOF (Euler Angles) и 6DOF (Quaternion) страниц с описанием блоков для получения дополнительной информации об этих блоках.
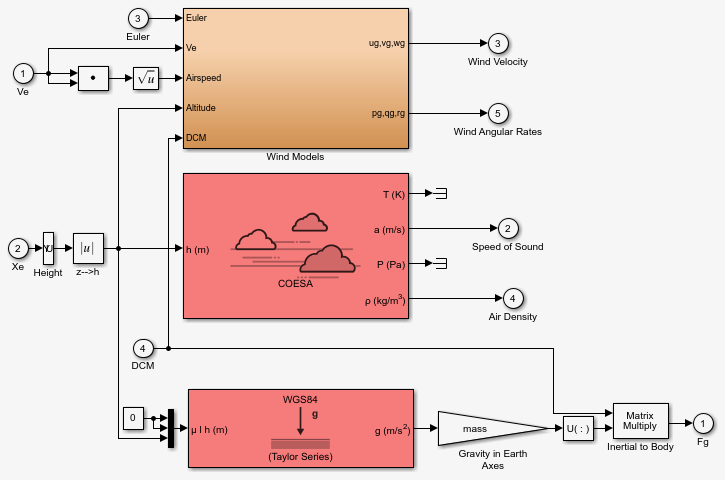
Подсистема Моделей окружающей среды содержит следующие подсистемы и блоки:
Блок WGS84 Gravity Model реализует математическое представление геоцентрического эквипотенциального эллипсоида Мировой геодезической системы (WGS84).
Для получения дополнительной информации об этом блоке см. WGS84 Gravity Model страницы с описанием блоков.
Блок модели атмосферы COESA реализует математическое представление стандарта Комитета 1976 по расширению стандартной атмосферы (COESA) более низкие атмосферные значения для абсолютной температуры, давления, плотности и скорости звука, учитывая входную геопотенциальную высоту.
Для получения дополнительной информации об этом блоке см. COESA Atmosphere Model страницы с описанием блоков.
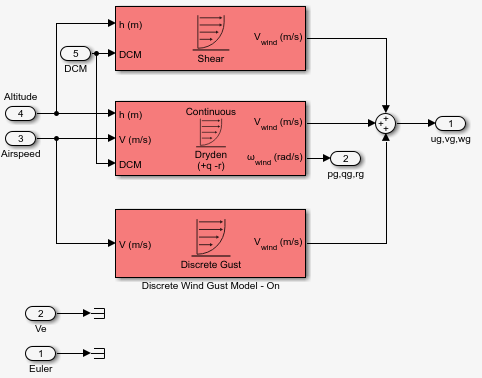
Подсистема Wind Models содержит следующие блоки:
Блок Модель Сдвига Ветра добавляет сдвиг ветра к модели.
Для получения дополнительной информации об этом блоке см. Wind Shear Model страницы с описанием блоков.
Блок Discrete Wind Gust Model реализует порыв ветра стандартной формы «1 - косинус».
Для получения дополнительной информации об этом блоке см. Discrete Wind Gust Model страницы с описанием блоков.
Блок Dryden Wind Turbulence Model (Continuous) использует спектральное представление Драйдена, чтобы добавить турбулентность к аэрокосмической модели, передавая ограниченный полосой белый шум через соответствующие формирующие фильтры.
Для получения дополнительной информации об этом блоке см. Dryden Wind Turbulence Model (Continuous) страницы с описанием блоков.
Модели окружающей среды реализуют математические представления в стандартных ссылках, таких как Стандартная атмосфера США, 1976.
Модели окружающей среды в HL-20 модели планера
Модели ветра в HL-20 модели планера
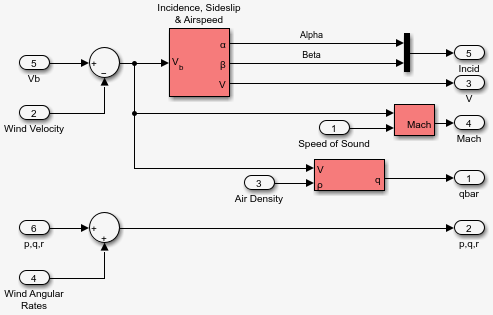
Подсистема Альфа, Бета, Маха вычисляет дополнительные параметры, необходимые для расчета аэродинамического коэффициента и поиска. Эти дополнительные параметры включают
Число Маха
Углы падения ()![]()
Скорость полета
Динамическое давление
Подсистема Альфа, Бета, Маха корректирует скорость тела по скорости ветра и корректирует скорости тела по угловому ускорению ветра.
Дополнительные вычисленные параметры для модели HL-20 кадра (Альфа, Бета, Подсистема Маха)
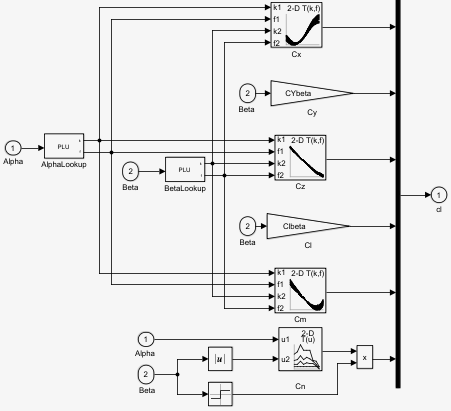
Подсистема Аэродинамических Коэффициентов содержит аэродинамические данные и уравнения для вычисления шести аэродинамических коэффициентов, которые реализованы как в ссылке [1]. Далее следуют шесть аэродинамических коэффициентов.
| Cx | Коэффициент осевой силы |
| Сай | Коэффициент боковой силы |
| Cz | Коэффициент нормальной силы |
| Статья | Коэффициент наклонного момента |
| Cm | Коэффициент Питчинг-момент |
| Cn | Коэффициент зевания-момента |
Эффекты заземления и шасси в эту модель не включены.
Вклад каждого из этих коэффициентов вычисляется в подсистемах (скорость тела, шаг привода и данная величина), а затем суммируется и передается в подсистему Силы и Моменты.
Аэродинамические коэффициенты в модели HL-20 планера
Аэродинамические данные были собраны из испытаний аэродинамической трубы, в основном, на масштабированных моделях предварительной дозвуковой аэродинамической модели HL-20. Данные были подобраны по кривой, и большинство аэродинамических коэффициентов описаны полиномиальными функциями угла атаки и угла боковой оси. Подробную информацию об аэродинамических данных и сокращении данных можно найти в ссылке [1].
Полиномиальные функции, содержащиеся в aeroblk_init_hl20.m файл используется для вычисления интерполяционных таблиц, используемых функцией предварительной загрузки модели. Интерполяционные таблицы заменяют полиномиальные функции. В зависимости от порядка и реализации функции, использование интерполяционных таблиц может быть более эффективным, чем перерасчет значений на каждом временном шаге с функциями. Для дальнейшего повышения эффективности большинство таблиц реализовано как PreLook-up Index Search и Interpolation (n-D) с использованием блоков PreLook-up. Эти блоки улучшают эффективность больше всего, когда в модели есть ряд таблиц с одинаковыми точками останова. Эти блоки сокращают количество раз, когда модель должна искать точку останова за заданный временной шаг. Если таблицы заполнены функцией предварительной загрузки, аэродинамический коэффициент может быть вычислен.
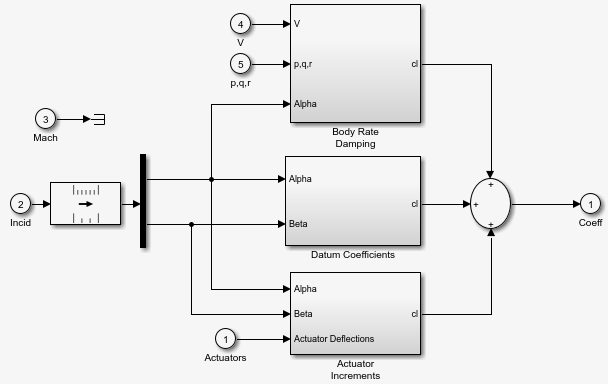
Уравнения для вычисления шести аэродинамических коэффициентов разделены на три подсистемы:
Суммирование выходов Подсистемы Данных величин, Демпфирования Скорости Тела и Шагов Привода генерирует шесть аэродинамических коэффициентов, используемых для вычисления сил и моментов планера [1].
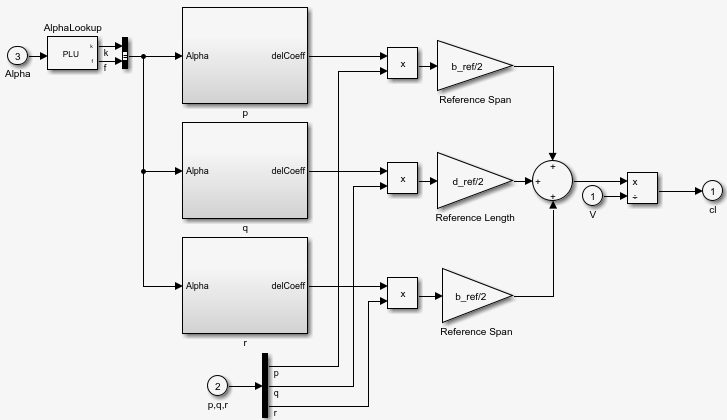
Данная величина коэффициентов. Подсистема Опорные Коэффициенты вычисляет коэффициенты для базового строения без отклонения поверхности управления. Эти базовые коэффициенты зависят только от углов падения тела.
Подсистема демпфирования скорости тела. Производные динамического движения вычисляются в Подсистеме Демпфирования Скорости Тела.
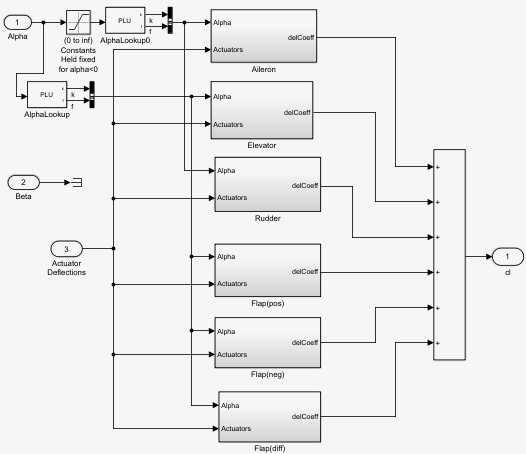
Шаг привода. Интерполяционные таблицы определяют инкрементальные изменения коэффициентов из-за отклонений поверхности управления в Подсистеме шага привода. Доступные поверхности управления включают симметричные закрылки крыла (лифт), дифференциальные закрылки крыла (элероны), положительные закрылки корпуса, отрицательные закрылки корпуса, дифференциальные закрылки корпуса и полностью подвижный руль направления.
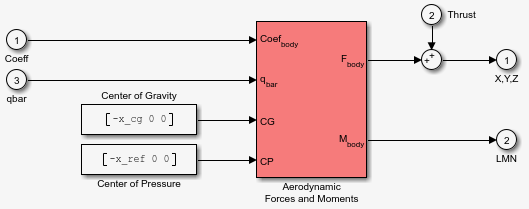
Подсистема сил и моментов. Подсистема Силы и Моменты вычисляет силы тела и моменты тела, действующие на планер вокруг центра тяжести. Эти силы и моменты зависят от аэродинамических коэффициентов, тяги, динамического давления и параметров опорного корпуса.
Эти подсистемы, которые вы исследовали, завершают работу с HL-20 планером. Следующим шагом в процессе разработки управления полетом является анализ, обрезка и линеаризация HL-20 планера, чтобы для него могла быть спроектирована система управления рейсом. Пример автоматического управления полетом для HL-20 планера можно увидеть в aeroblk_HL20 пример.
[1] Jackson, E. B., and C. L. Cruz, «Preliminary Subsonic Aerodynamic Model for Simulation Studies of the HL-20 Lifting Body», NASA TM4302 (август 1992).
Этот документ включен в HL-20 Lifting Body .zip файл, доступный из MATLAB Central.
[2] Морринг, Ф., младший, «Исследование» Спасательная шлюпка «МКС включает ПЕЛ», Aviation Week & Space Technology (20 мая 2002).