Реализуйте представление угла Эйлера уравнений движения с шестью степенями свободы
Аэрокосмический Уравнения Движения/ 6DOF
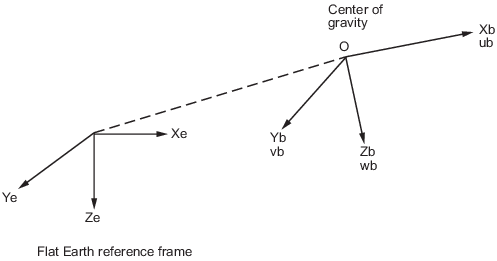
Блок 6DOF (Euler Angles) реализует представление угла Эйлера уравнений движения с шестью степенями свободы, принимая во внимание вращение неподвижной координатной системы координат (Xb, Yb, Zb) вокруг плоской системы отсчета Земли (Xe, Ye, Ze). Для получения дополнительной информации об этих ссылочных точках см. «Алгоритмы».
Блок принимает, что приложенные силы действуют в центре тяжести тела, и что масса и инерция постоянны.
Блок 6DOF (Euler Angles) использует эти концепции систем координат.
Источником координатной системы координат тела является центр тяжести тела, и тело принято твердым, что исключает необходимость рассматривать силы, действующие между отдельными элементами массы.
Плоская система координат Земли считается инерционной, отличное приближение, которое позволяет пренебрегать силами, обусловленными движением Земли относительно «неподвижных звёзд».
Поступательное движение неподвижной координатной системы координат, где приложенные силы [Fx Fy Fz]T находятся в фиксированной по телу системе координат, и масса m тела принята постоянной.
Динамика вращения неподвижной системы координат, где приложенные моменты [L M N]T, и тензор инерции I относительно origin O.
Отношение между вектором скорости вращения с фиксированным телом, [p q r]Tи скорость изменения углов Эйлера, , определяются путем разрешения скоростей Эйлера в фиксированную в теле координатную систему координат.
Инвертирование J затем дает необходимую зависимость, чтобы определить вектор скорости Эйлера.
[1] Стивенс, Брайан и Фрэнк Льюис, Aircraft Control and Simulation. Hoboken, NJ: Second Edition, John Wiley & Sons, 2003.
[2] Zipfel, Peter H., Моделирование и симуляция аэрокосмической Динамики аппарата. Reston, Va: Second Edition, AIAA Education Series, 2007.
6DOF (Quaternion) | 6DOF ECEF (Quaternion) | 6DOF Wind (Quaternion) | 6DOF Wind (Wind Angles) | Custom Variable Mass 6DOF (Euler Angles) | Custom Variable Mass 6DOF (Quaternion) | Custom Variable Mass 6DOF ECEF (Quaternion) | Custom Variable Mass 6DOF Wind (Quaternion) | Custom Variable Mass 6DOF Wind (Wind Angles) | Simple Variable Mass 6DOF (Euler Angles) | Simple Variable Mass 6DOF (Quaternion) | Simple Variable Mass 6DOF ECEF (Quaternion) | Simple Variable Mass 6DOF Wind (Quaternion) | Simple Variable Mass 6DOF Wind (Wind Angles)
