Следующий рисунок показывает Simulink® блок показывает задачу отслеживания при проекте автопилота самолета. Чтобы открыть эту схему, введите lqrpilot в MATLAB® приглашение.
Ниже перечислены ключевые возможности этой схемы:
Блок Linearized Dynamics содержит линеаризированный планер.
sf_aerodyn является блоком S-Function, который содержит нелинейные уравнения для .
Сигнал ошибки между и передается через интегратор. Это помогает довести ошибку до нуля.
Начиная со стандартного уравнения пространства состояний
где
Переменные u, v и w являются тремя скоростями относительно каркаса кузова, показанными следующим образом.
Координатная система координат тела для самолета
Переменные и являются скорости крена и тангажа, а p, q и r являются скоростями крена, тангажа и рыскания, соответственно.
Динамика планера нелинейна. Следующее уравнение показывает нелинейные компоненты, добавленные к уравнению пространства состояний.
Нелинейная составляющая уравнения пространства состояний
Чтобы увидеть числовые значения для A и B, введите
load lqrpilot A, B
в подсказку MATLAB.
В целях проекта LQG нелинейная динамика обрезается и p, q, r и θ равны нулю. Поскольку u, v и w не входят в нелинейный термин на предыдущем рисунке, это эквивалентно линеаризации вокруг со всеми оставшимися состояниями в нуле. Получившаяся матрица состояний линеаризированной модели называется A15.
Цель выполнить устойчивый скоординированный поворот, как показано на этом рисунке.
Самолет делает поворот на 60 °
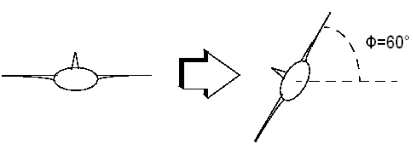
Чтобы достичь этой цели, вы должны спроектировать контроллер, который командует устойчивым поворотом, проходя через крен 60 °. В сложение примите, что θ, угол тангажа, необходим, чтобы держаться как можно ближе к нулю.
Чтобы вычислить матрицу усиления LQG, K, type
lqrdes
в подсказку MATLAB. Затем запустите lqrpilot модель с нелинейной моделью, sf_aerodyn, выбран.
Этот рисунок показывает реакцию к команде 60 ° step.
Отслеживание команды Roll Step
Как видим, система отслеживает командный крен на 60 ° примерно за 60 секунд.
Другой целью было сохранить θ, угол тангажа, относительно небольшой. Этот рисунок показывает, насколько хорошо это сделал контроллер LQG.
Минимизация смещения в угле тангажа, Theta
Наконец, этот рисунок показывает входы управления.
Управляйте входами для задачи отслеживания LQG
Попробуйте настроить Q и R матрицы в lqrdes.m и проверка входов управления и состояний системы, обеспечение повторного запуска lqrdes для обновления матрицы усиления LQG K. С помощью проб и ошибок вы можете улучшить время отклика этого проекта. Кроме того, сравните линейный и нелинейный проекты, чтобы увидеть эффекты нелинейности на производительности системы.
