Во многих приложениях одноконтурная система управления не является допустимой из-за вашего проекта объекта или требований к проекту. Если у вас есть проект с внутренним и внешним контуром, можно использовать Control System Designer для разработки компенсаторов для обоих циклов.
Типичный рабочий процесс состоит в том, чтобы сначала настроить компенсатор для внутреннего цикла путем изоляции внутреннего цикла от остальной части системы управления. После того, как внутренний цикл будет удовлетворительно настроен, настройте внешний контур, чтобы получить необходимую реакцию с обратной связью.
В данном примере разрабатывается система управления положением для двигателя постоянного тока. Одноконтурный контроллер скорости вращения разработан в Bode Diagraph Design. Чтобы спроектировать контроллер углового положения, добавьте внешний контур, который содержит интегратор.
Задайте модель объекта управления в пространстве состояний, как описано в Пример: The DC Motor.
% Define the motor parameters R = 2.0 L = 0.5 Km = .015 Kb = .015 Kf = 0.2 J = 0.02 % Create the state-space model A = [-R/L -Kb/L; Km/J -Kf/J] B = [1/L; 0]; C = [0 1]; D = [0]; sys_dc = ss(A,B,C,D);
Цель проекта состоит в том, чтобы минимизировать переходную характеристику времени урегулирования с обратной связью с сохранением запаса по фазе с внутренней связью не менее 65 степени с максимальной шириной полосы:
Минимальное время урегулирования переходной характеристики с обратной связью.
Запас фазы внутреннего контура не менее 65 степени.
Максимальная шумовая полоса.
Control System Designer имеет шесть возможных архитектур управления, из которых можно выбрать. Дополнительные сведения об этих архитектурах см. в разделе Архитектуры управления с обратной связью.
В данном примере используется Строение 4, которая имеет внутренний и внешний цикл управления.
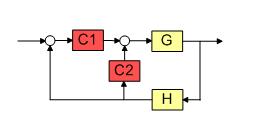
В настоящее время структура системы управления не соответствует строению 4. Однако блок помощью алгебры схем можно изменить системную модель, добавив:
Интегратор на выходе мотора, чтобы получить угловое перемещение.
Дифференциатор пути обратной связи с внутренним контуром.
В MATLAB® командная строка, добавьте интегратор к модели объекта управления.
plant = sys_dc*tf(1,[1,0]);
Создайте начальную модель компенсатора внутреннего контура, которая содержит дифференциатор обратной связи.
Cdiff = tf('s');Откройте Control System Designer.
controlSystemDesigner
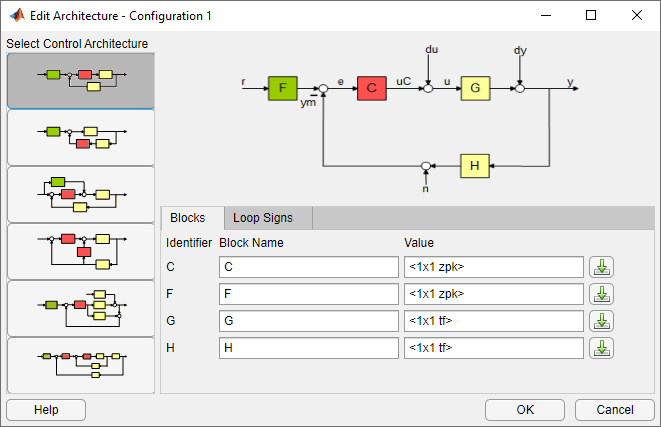
В Control System Designer на вкладке Control System нажмите Edit Architecture.
В диалоговом окне Edit Architecture в разделе Select Control Architecture выберите четвертую архитектуру.
Импортируйте объект и модели контроллеров из Рабочего пространства MATLAB.
На вкладке Blocks для:
Контроллер C2, задайте Value Cdiff.
Объект G, задайте Value plant.
Нажмите OK.
Приложение обновляет архитектуру управления и импортирует указанные модели для объекта и контроллера внутреннего контура.
В Control System Designer открываются следующие графики:
Bode Editor for LoopTransfer_C1 - Редактор Bode без разомкнутого контура для внешнего контура
Root Locus Editor for LoopTransfer_C1 - Редактор корневых годографов разомкнутой системы для внешнего контура
Bode Editor for LoopTransfer_C2 - Редактор Bode без разомкнутого контура для внутреннего цикла
Root Locus Editor for LoopTransfer_C2 - Разомкнутый контур корневого годографа Редактора для внутреннего контура
IOTransfer_r2y: step - Общая замкнутая система переходной характеристики от входа r до вывода y
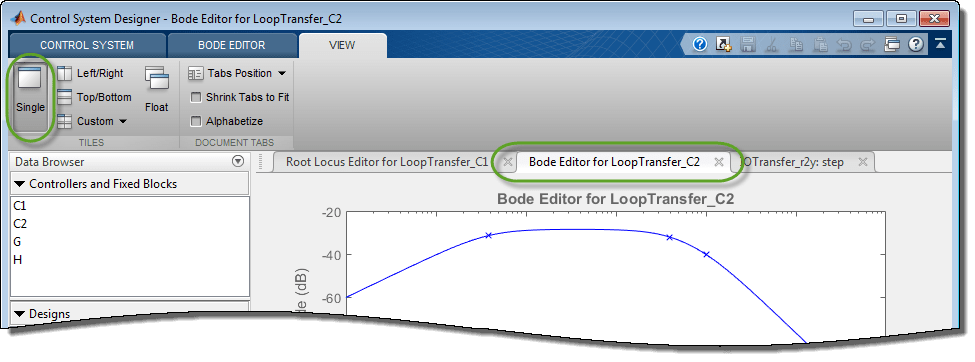
В данном примере закройте Bode Editor for LoopTransfer_C1 и Root Locus Editor for LoopTransfer_C2 графики.
Поскольку внутренний цикл настраивается первым, сконфигурируйте графики, чтобы просмотреть только график редактора Bode с внутренним циклом. На вкладке View нажмите Single и нажмите Bode Editor for LoopTransfer_C2.
Чтобы изолировать внутренний цикл от остальной архитектуры системы управления, добавьте открытие цикла к отклику разомкнутого контура внутреннего цикла. В Data Browser щелкните правой кнопкой мыши LoopTransfer_C2, и выберите Open Selection.
Чтобы добавить открытие цикла на выходе компенсатора внешнего контура, C1 в диалоговом окне Передаточная функция разомкнутого контура, нажмите![]() Add loop opening location to list. Затем выберите uC1.
Add loop opening location to list. Затем выберите uC1.
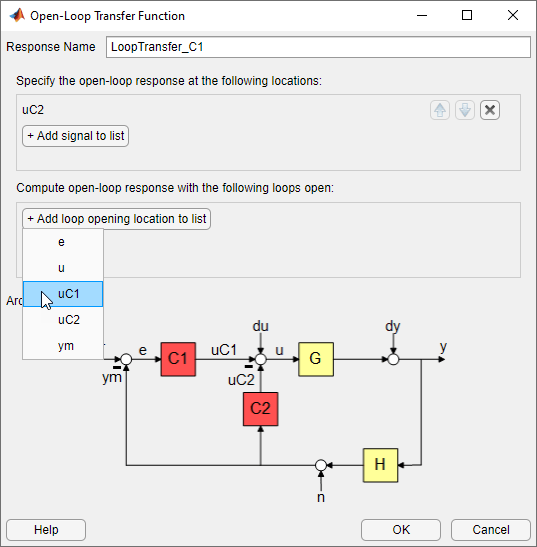
Нажмите OK.
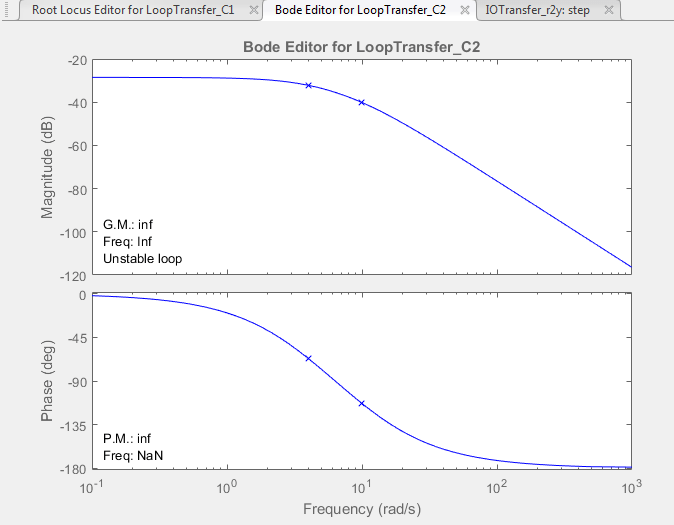
Приложение добавляет открытие цикла в выбранном месте. Это открытие удаляет эффект внешнего цикла управления на передаточную функцию разомкнутого контура внутреннего цикла.
Этот Bode Editor график отклика обновления, чтобы отразить новые разомкнутые контуры передаточной функции.
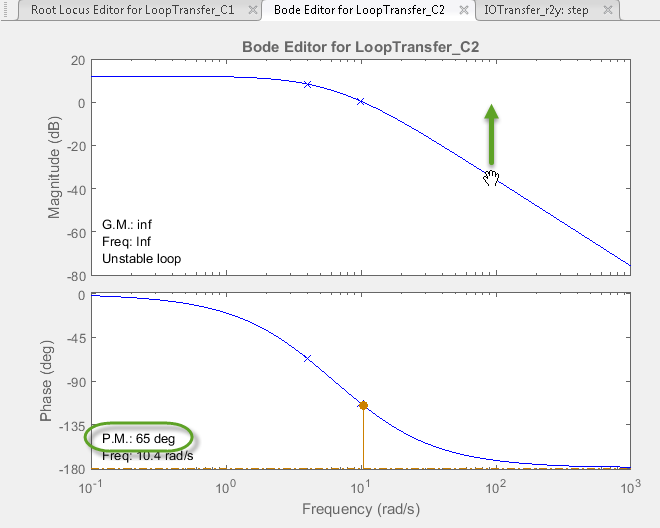
Чтобы увеличить пропускную способность внутреннего цикла, увеличьте коэффициент усиления компенсатора C2.
На Bode Editor графике перетащите характеристику величины вверх, пока запас по фазе не составит 65 степени. Это соответствует усилению компенсатора 107. Увеличение усиления дополнительно уменьшает запас по фазе ниже 65 степени.
Также можно настроить значение усиления с помощью редактора компенсаторов. Для получения дополнительной информации см. раздел «Редактирование динамики компенсатора».
После настройки внутреннего цикла можно настроить внешний контур, чтобы уменьшить время урегулирования замкнутого контура.
В Control System Designer на вкладке View выберите Left/Right. Расположите графики, чтобы отобразить Root Locus for LoopTransfer_C1 и IOTransfer_r2y_step графики одновременно.
Чтобы просмотреть текущее время урегулирования, щелкните правой кнопкой мыши по переходному процессу и выберите Characteristics > Settling Time.
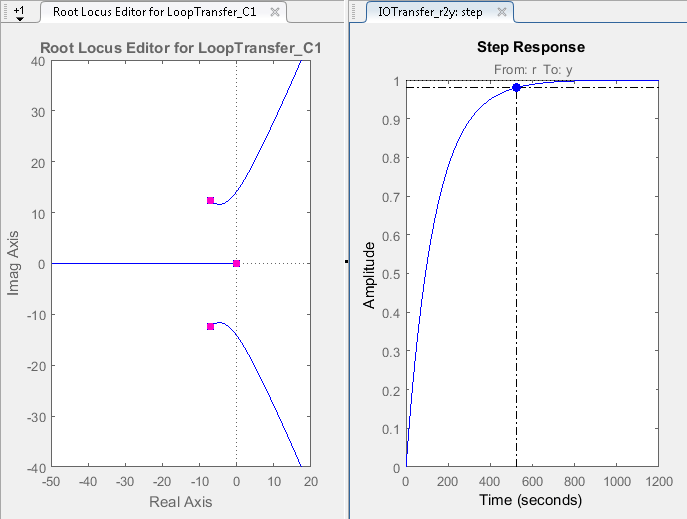
Текущее время урегулирования с обратной связью больше 500 секунд.
В Root Locus Editor увеличьте коэффициент усиления компенсатора C1. Когда коэффициент усиления увеличивается, комплексная пара полюсов движется к более медленной постоянной времени, а действительный полюс движется к более быстрой постоянной времени. Усиление 600 создает хороший компромисс между временем нарастания и временем урегулирования.
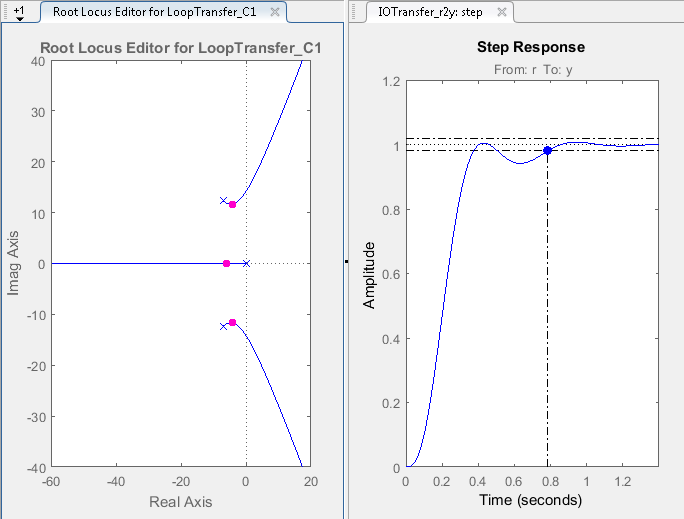
Со время урегулирования с обратной связью ниже 0,8 секунд и запасом по фазе с внутренним контуром 65 степеней, проект удовлетворяет проектным требованиям.
