Упрощение с нулем полюса уменьшает порядок вашей модели точно путем отмены пар с нулем полюса или устранения состояний, которые не влияют на общую реакцию модели. Пары с нулем полюса могут быть введены, например, когда вы создаете архитектуры с обратной связью. Нормальные небольшие ошибки, сопоставленные с численными расчетами, могут преобразовать такие пары отмены в пары, близкие к отмене. Удаление этих состояний сохраняет характеристики отклика модели при упрощении анализа и системы управления. Типы упрощения с нулем полюса включают:
Структурное устранение - устранение состояний, которые структурно отключены от входов или выходов. Устранение структурно несвязанных состояний является хорошим первым шагом в снижении сложности модели, потому что процесс не включает какие-либо численные расчеты. Также сохраняется государственное устройство остальных состояний. Такие структурно неминимальные состояния могут возникнуть, например, когда вы линеаризируете Simulink® модель, которая включает некоторые несвязанные блоки пространства состояний или передаточных функций. В командной строке выполните структурное устранение с sminreal.
Удаление нулей-полюсов или минимальная реализация - Исключение пар гашения или почти гашения полюса с нули из передаточных функций. Исключить ненаблюдаемые или неконтролируемые состояния из моделей пространства состояний. В командной строке выполните этот вид упрощения с minreal.
В приложении Model Reducer и задаче Reduce Model Order Live Editor метод Pole-Zero Simplification автоматически устраняет структурно отключенные состояния, а также выполняет удаление нулей-полюсов или минимальную реализацию.
Model Reducer предоставляет интерактивный инструмент для выполнения снижения сложности модели и исследования и сравнения ответов исходных и пониженных моделей. Чтобы уменьшить модель за счет упрощения с нулем полюсов в Model Reducer:
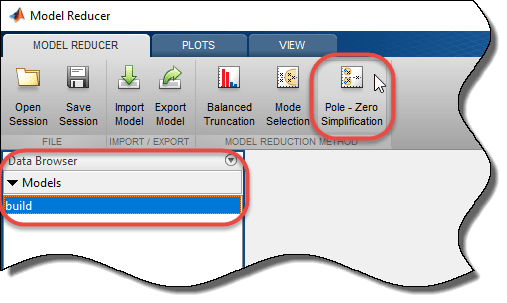
Откройте приложение и импортируйте модель, чтобы уменьшить. Например, предположим, что существует модель с именем build в MATLAB® рабочей области. Следующая команда откроется Model Reducer и импортирует модель LTI build.
modelReducer(build)
В Data Browser выберите модель для сокращения. Нажмите![]() Pole-Zero Simplification.
Pole-Zero Simplification.
На вкладке Pole-Zero Simplification Model Reducer отображает график частотной характеристики исходной модели и сокращенную версию модели. Приложение также отображает карту ноль полюсов обеих моделей.

Карта ноль полюсов помечает местоположение полюсов x и нулевые местоположения с o.
Примечание
Частотная характеристика является диаграммой Боде для моделей SISO и графиком с сингулярным значением для моделей MIMO.
Опционально измените допуск, с которым Model Reducer идентифицирует отменяющиеся пары полюс-ноль. Model Reducer отменяет пары с нулем полюса, которые попадают в допуск, заданный Simplification of pole-zero pairs значением. В этом случае никакие пары с нулем полюсов не являются достаточно близкими друг к другу, чтобы Model Reducer отменили их при допуске по умолчанию 1e-05. Чтобы отменить пары, расположенные немного дальше друг от друга, переместите ползунок вправо или введите большее значение в текстовое поле.
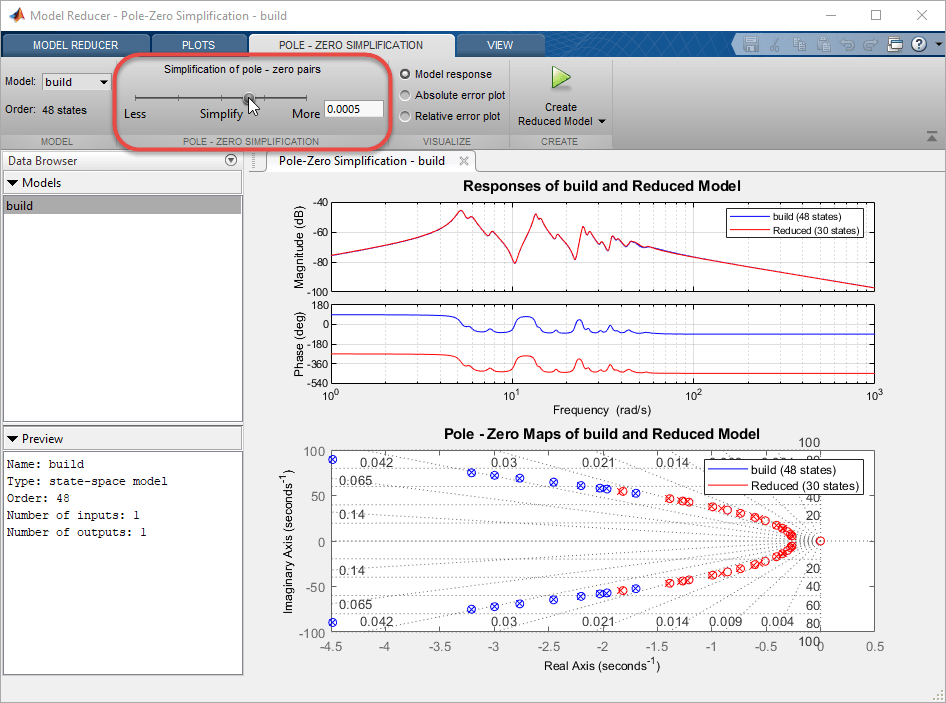
Синяя x и o метки на карте ноль полюсов показывают почти отменяющиеся пары ноль полюсов в исходной модели, которые исключены из упрощенной модели. Оставшиеся в упрощенной модели поляки и нули отмечены красными x и o.
Попробуйте различные допуски упрощения при наблюдении частотной характеристики исходной и упрощенной модели. Удалите столько полюсов и нулей, сколько вы можете, сохраняя поведение системы в частотной области, которая важна для вашего приложения. Опционально рассмотрим абсолютную или относительную погрешность между исходной и упрощенной моделью. Выберите тип вывода ошибок с помощью кнопок на вкладке Pole-Zero Simplification.
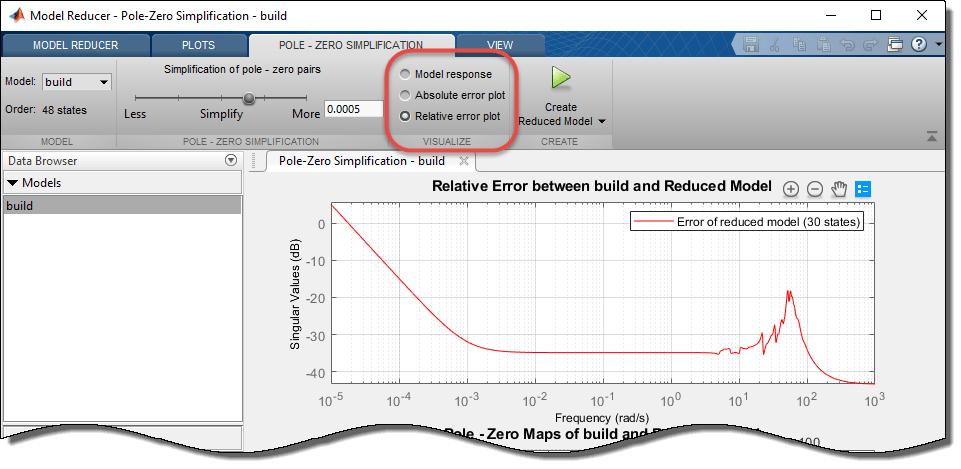
Для получения дополнительной информации об использовании графиков анализа смотрите Визуализация моделей пониженного порядка в приложении Model Reducer.
Когда у вас есть упрощенная модель, которую вы хотите хранить и анализировать дальше, нажмите. ![]() Новая модель появляется в Data Browser с именем, которое отражает пониженный порядок модели.
Новая модель появляется в Data Browser с именем, которое отражает пониженный порядок модели.

После создания сокращенной модели в Data Browser можно продолжить изменение параметров упрощения и создать уменьшенные модели с различными порядками для анализа и сравнения.
Теперь можно выполнить последующий анализ с помощью уменьшенной модели. Для примера:
Исследуйте другие отклики редуцированной системы, такие как переходные характеристики или график Николса. Для этого используйте инструменты на вкладке Plots. Смотрите Визуализацию Моделей Пониженного Порядка в Приложении Model Reducer для получения дополнительной информации.
Экспортируйте уменьшенные модели в рабочее пространство MATLAB для последующего анализа или системы управления. На вкладке Model Reducer нажмите![]() Export.
Export.
Чтобы создать скрипт MATLAB, можно использовать для дальнейших задач снижения сложности модели в командной строке, нажмите Create Reduced Model и выберите Generate MATLAB Script.
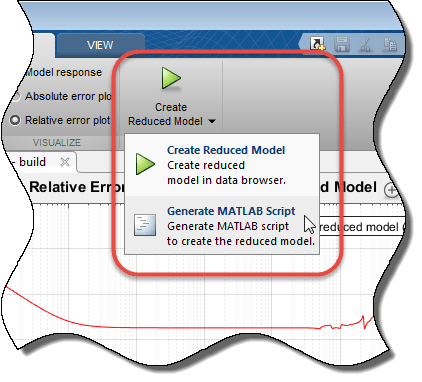
Model Reducer создает скрипт, который использует minreal команда для выполнения снижения сложности модели с параметрами, установленными на вкладке Pole-Zero Simplification. Скрипт откроется в редакторе MATLAB.
Чтобы уменьшить порядок модели путем удаления нулей-полюсов в командной строке, используйте minreal.
Создайте модель следующей системы, где C является ПИ-контроллер G имеет нуль в рад/с. Такой низкочастотный нуль может возникнуть из-за производного действия где-то в динамике объекта. Для примера объект может включать компонент, который вычисляет скорость из измерений положения.

G = zpk(3e-8,[-1,-3],1); C = pid(1,0.3); T = feedback(G*C,1)
T =
(s+0.3) (s-3e-08)
----------------------
s (s+4.218) (s+0.7824)
Continuous-time zero/pole/gain model.
В модели с обратной связью T, интегратор от C очень почти отменяет низкочастотный нуль G.
Принудительная отмена интегратора с нулем около источника.
Tred = minreal(T,1e-7)
Tred =
(s+0.3)
--------------------
(s+4.218) (s+0.7824)
Continuous-time zero/pole/gain model.
По умолчанию minreal уменьшает порядок передаточной функции путем отмены точных пар «полюс-ноль» или пар «около полюса-ноль» в sqrt(eps). Определение 1e-7 как второй вход вызывает minreal чтобы исключить пары «полюс-ноль» в рад/с друг друга.
Уменьшенная модель Tred включает всю динамику исходной модели замкнутой системы T, за исключением почти отменяющейся пары нули с шестом.
Сравните частотные характеристики исходной и уменьшенной систем.
bode(T,Tred,'r--') legend('T','Tred')

Поскольку отмененные полюс и нуль не совпадают точно, некоторые экстремальные низкочастотные динамики, заметные в исходной модели, отсутствуют в Tred. Во многих приложениях можно пренебрегать такой экстремальной низкочастотной динамикой. Когда вы увеличиваете соответствующий допуск minrealубедитесь, что вы не устраняете динамические функции, относящиеся к вашему приложению.
