Проект корневого годографа является общим методом разработки системы управления, в котором вы редактируете коэффициент усиления компенсатора, полюсы и нули в корневом годографе.
Когда коэффициент усиления без разомкнутого контура, k, системы управления изменяется в непрерывной области значений значений, корневая локусная схема показывает траектории полюсов с обратной связью системы с обратной связью. Для примера в следующей системе слежения:
P (s) - объект, H (s) - динамика датчика, а k - регулируемое скалярное усиление. Полюсы с обратной связью являются корнями
Метод корневого годографа состоит из графического изображения траекторий полюсов с обратной связью в комплексной плоскости с изменениями k. Можно использовать этот график, чтобы идентифицировать значение усиления, сопоставленное с желаемым набором полюсов с обратной связью.
Этот пример показывает, как спроектировать компенсатор для электрогидравлического сервомеханизма с помощью методов графической настройки корневого годографа.
Модель объекта управления
Простая версия электрогидравлической модели сервомеханизма состоит из
Тяговый усилитель (пара электромагнитов)
Золотник скольжения в сосуде гидравлической жидкости высокого давления
Открытия клапана в сосуде, чтобы позволить потоку жидкости
Центральная ёмкость с поршневым цилиндром для подачи силы на нагрузку
Симметричный гидроемкость возврата
Сила на золотник пропорциональна току в катушке электромагнита. Когда золотник перемещается, клапан открывается, позволяя гидравлической жидкости высокого давления течь через ёмкость. Движущаяся жидкость заставляет поршень двигаться в противоположном направлении золотника. Для получения дополнительной информации об этой модели, включая выведение линеаризированной модели, см. [1].
Можно использовать вход напряжение к электромагниту, чтобы управлять положением плашки. Когда доступны измерения положения плунжера, можно использовать обратную связь для управления положением плунжера, как показано на следующем, где Gservo представляет сервомеханизм:

Требования к проектированию
В данном примере настройте компенсатор C (s), чтобы удовлетворить следующим требованиям к переходной характеристике с обратной связью:
Значение 2% времени урегулирования меньше 0,05 секунд.
Максимальное перерегулирование составляет менее 5%.
Откройте Control System Designer
В MATLAB® командная строка, загрузка линеаризированной модели сервомеханизма и открытие Control System Designer в строении корневого годографа.
load ltiexamples Gservo controlSystemDesigner('rlocus',Gservo);
Приложение открывается и импортирует Gservo как модель объекта управления по умолчанию, архитектура Configuration 1.
В Control System Designer Root Locus Editor график и вход-вывод Step Response открытым.
Чтобы просмотреть частотную характеристику без разомкнутого контура и переходную характеристику с обратной связью одновременно, щелкните и перетащите графики в нужное место.
Приложение отображает Bode Editor и Step Response графики один за другим.
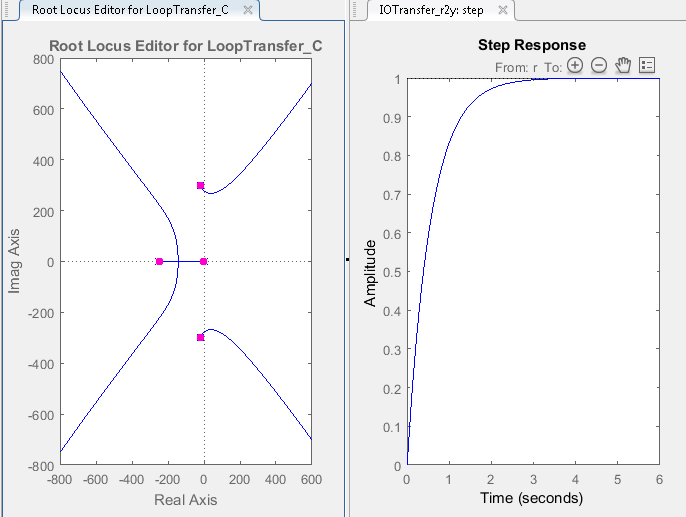
В переходный процесс с обратной связью времени нарастания составляет около двух секунд, что не удовлетворяет требованиям проекта.
Чтобы упростить чтение корневого годографа схемы, увеличьте изображение. В Root Locus Editor щелкните правой кнопкой мыши область графика и выберите Properties.
В диалоговом окне «Property Editor» на вкладке Limits задайте Real Axis и Imaginary Axis пределы от -500 на 500.
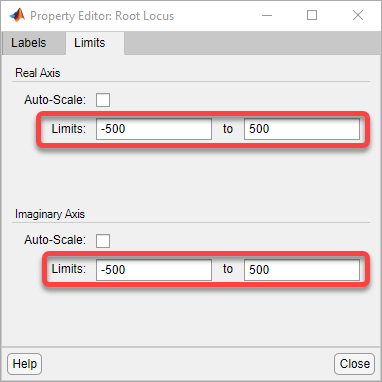
Нажмите Close.
Увеличение коэффициента усиления компенсатора
Чтобы создать более быстрый ответ, увеличьте коэффициент усиления компенсатора. В Root Locus Editor щелкните правой кнопкой мыши область графика и выберите Edit Compensator.
В диалоговом окне «Редактор компенсаторов» задайте коэффициент усиления 20.
На Root Locus Editor графике положения полюса с обратной связью перемещаются, чтобы отразить новое значение усиления. Также обновляется Step Response график.
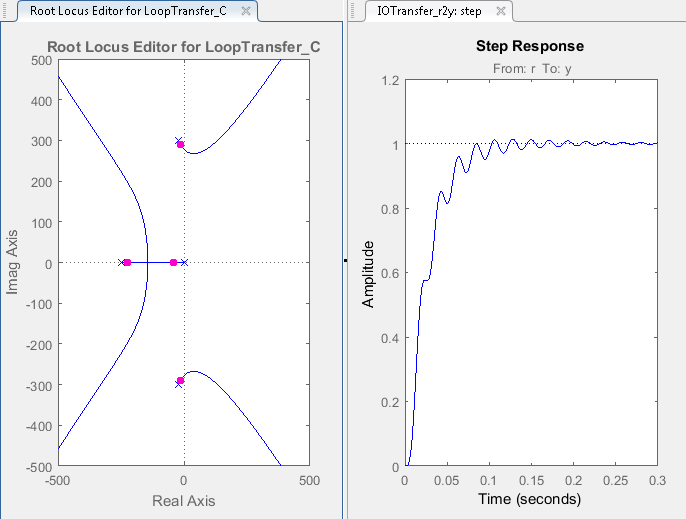
Реакция с обратной связью не удовлетворяет требованию времени урегулирования и показывает нежелательный звонок.
Увеличение усиления делает систему недостаточно демпфированной и дальнейшие увеличения приводят к нестабильности. Поэтому, чтобы удовлетворить требования проекта, необходимо задать дополнительную динамику компенсатора. Дополнительные сведения о добавлении и редактировании динамики компенсатора см. в разделе «Редактирование динамики компенсатора».
Добавьте полюса к компенсатору
Чтобы добавить сложную пару полюсов к компенсатору, в Root Locus Editor щелкните правой кнопкой мыши область графика и выберите Add Pole/Zero > Complex Pole. Щелкните область графика, в которую необходимо добавить один из сложных полюсов.
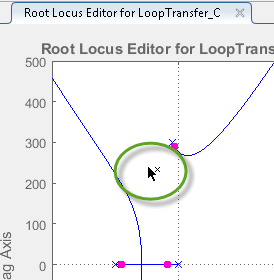
Приложение добавляет пару комплексных полюсов к корневому годографу графика красного цвета X"s, и обновляет переходный процесс.
В Root Locus Editor перетащите новые полюсы в положения около -140 ± 260 i. Когда вы перетаскиваете один полюс, другой полюс обновляется автоматически.
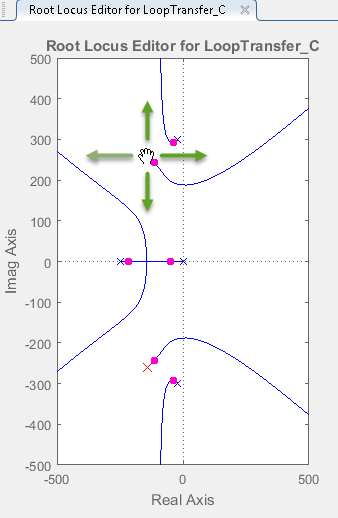
Совет
При перетаскивании шеста или нуля приложение отображает новое значение в строке состояния с правой стороны.

Добавьте нули к компенсатору
Чтобы добавить сложную нулевую пару к компенсатору, в диалоговом окне «Редактор компенсаторов» щелкните правой кнопкой мыши таблицу Dynamics и выберите Add Pole/Zero > Complex Zero
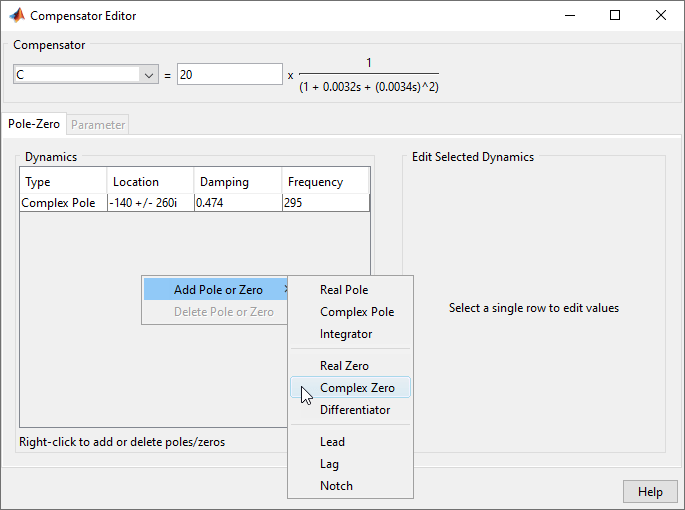
Приложение добавляет пару сложных нулей на уровне -1 ± i к вашему компенсатору
В таблице Dynamics щелкните Complex Zero строку. Затем в Edit Selected Dynamics разделе задайте Real Part -170 и Imaginary Part 430.
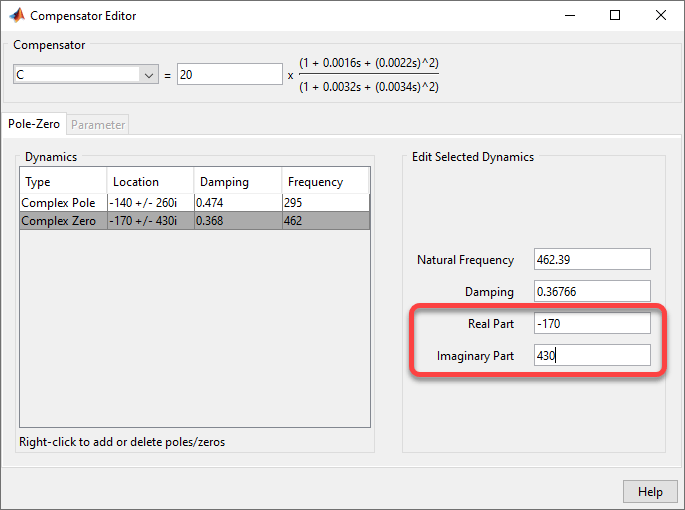
Компенсатор и графики отклика автоматически обновляются, чтобы отразить новые нулевые местоположения.
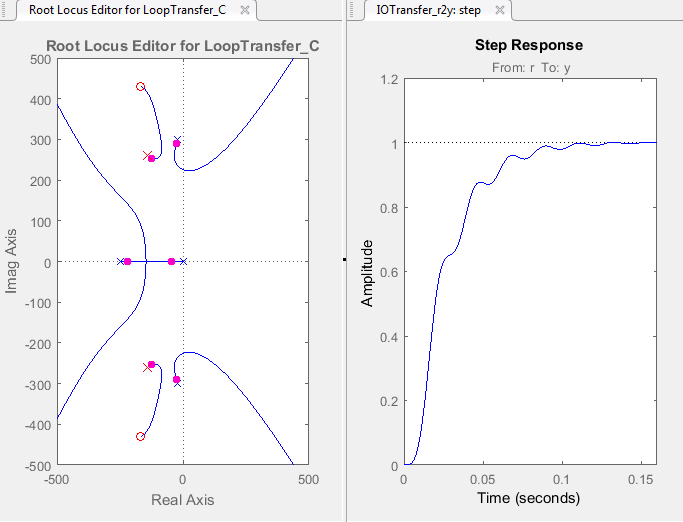
На Step Response графике время урегулирования составляет около 0,1 секунды, что не удовлетворяет требованиям проекта.
Регулировка положения полюса и нуля
Процесс проекта компенсатора может включать некоторые пробы и ошибки. Отрегулируйте коэффициент усиления компенсатора, местоположение полюса и нулевое положение, пока вы не удовлетворяете критериям проекта.
Одной из возможных конструкций компенсатора, которая удовлетворяет требования проекта, является:
Коэффициент усиления компенсатора 10
Комплексные полюсы при -110 ± 140 i
Комплексные нули в -70 ± 270 i
В диалоговом окне Редактор компенсатора сконфигурируйте компенсатор, используя эти значения. На Step Response графике время урегулирования составляет около 0,05 секунд.
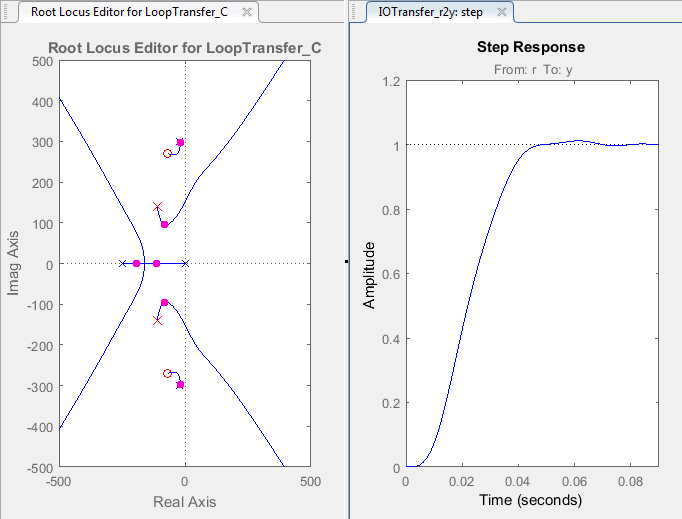
Чтобы проверить точное время урегулирования, щелкните правой кнопкой мыши Step Response область графика и выберите Characteristics > Settling Time. На время урегулирования появляется индикатор графика отклика.
Чтобы просмотреть время урегулирования, переместите курсор на индикатор времени урегулирования.
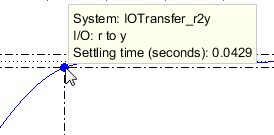
Время урегулирования составляет около 0,043 секунды, что удовлетворяет проект требованиям.
[1] Clark, R. N. Control System Dynamics, Cambridge University Press, 1996.
Control System Designer | rlocusplot
