Этот пример показов, как спроектировать 2-DOF с двумя степенями свободы ( ПИД-регулятора) с помощью PID Tuner. Пример также сравнивает эффективность контроллера 2-DOF с эффективностью, достигнутым с 1-DOF ПИД-регулятором.
В этом примере объект представляется как модель LTI. Для получения информации об использовании PID Tuner для настройки блока PID Controller (2DOF) в Simulink® модель, см. Проект ПИД-регуляторов с двумя степенями свободы (Simulink Control Design).
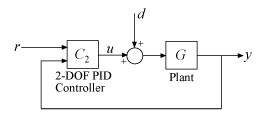
2-DOF ПИД-регуляторы включают взвешивание уставки на пропорциональном и производном терминах. По сравнению с 1-DOF ПИД-контроллером, 2-DOF ПИД-контроллер может добиться лучшего отторжения возмущения без значительного увеличения перерегулирования в отслеживании уставки. Типичная архитектура управления, использующая 2-DOF ПИД-регуляторы, показана на следующей схеме.
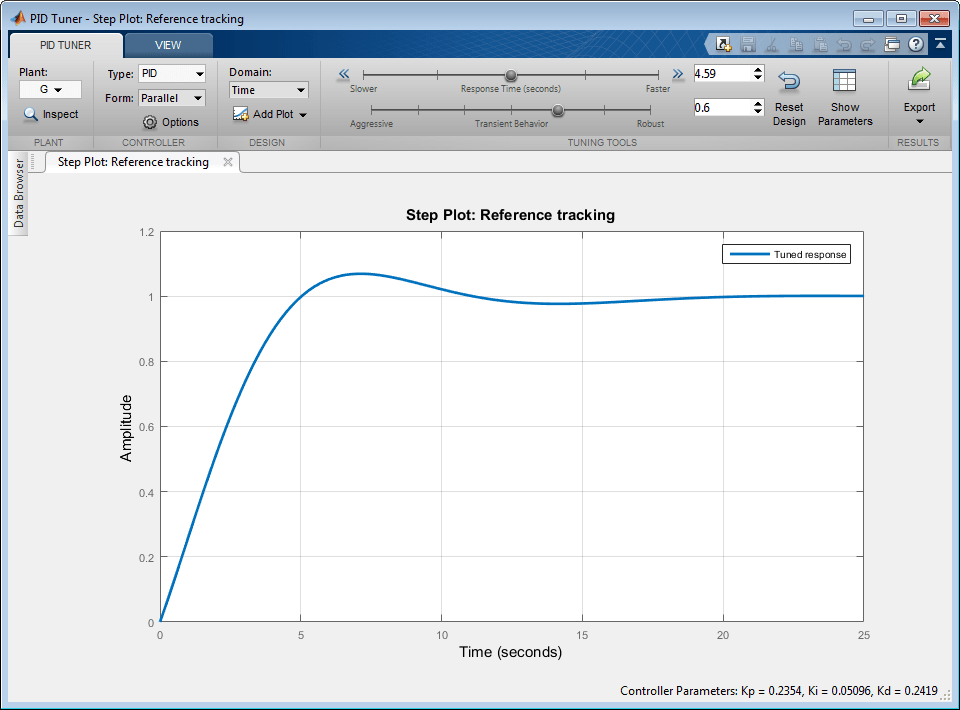
В данном примере сначала спроектируйте контроллер 1-DOF для объекта, заданный как:
G = tf(1,[1 0.5 0.1]); pidTuner(G,'PID')
Предположим, для этого примера ваше приложение требует более быстрого отклика, чем PID Tuner первоначальный проект. В текстовом поле рядом с ползунком Response Time введите 2.
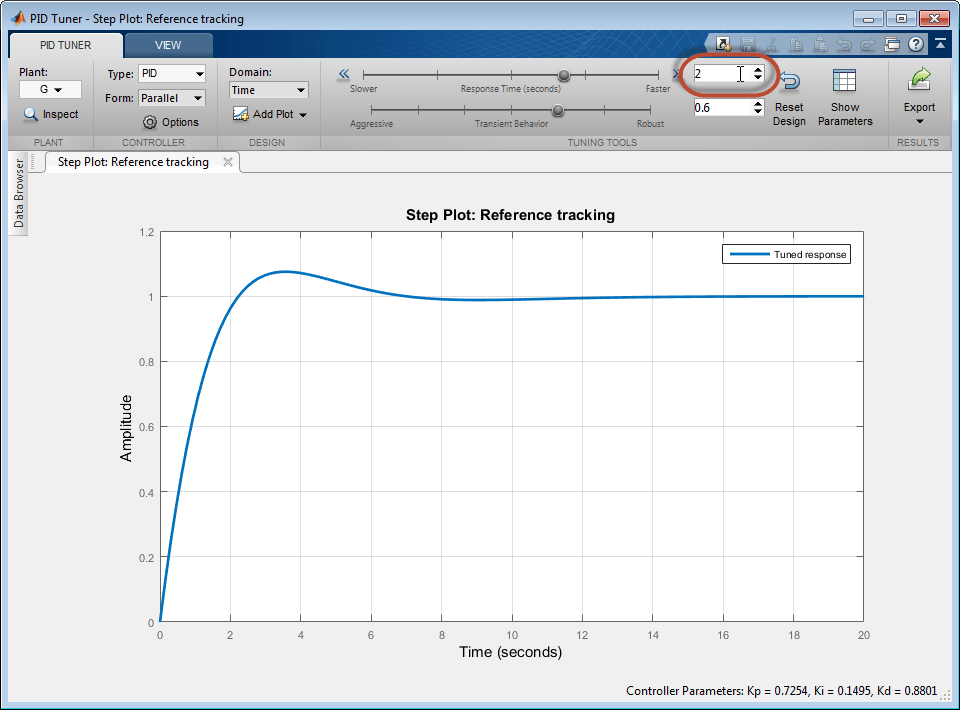
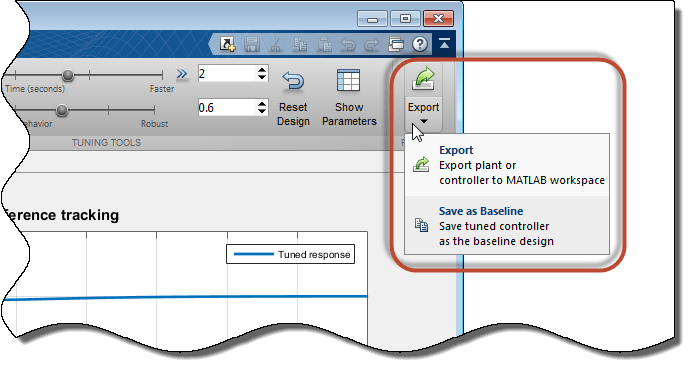
Получившаяся реакция является быстрой, но имеет значительное количество перерегулирования. Разработайте контроллер 2-DOF, чтобы улучшить перерегулирование. Сначала установите контроллер 1-DOF в качестве базового контроллера для сравнения. Нажмите на Export стрелы![]() и выберите
и выберите Save as Baseline.
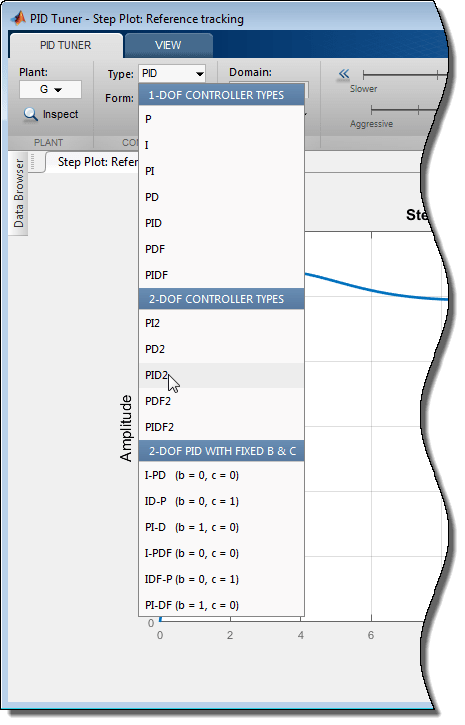
Проектируйте контроллер 2-DOF. В Type меню выберите PID2.
PID Tuner генерирует контроллер 2-DOF с таким же целевым временем отклика. Параметры контроллера, отображенные внизу справа, показывают, что PID Tuner настраивает все коэффициенты контроллера, включая веса уставки b и c, для баланса эффективности и робастности. Сравните эффективность контроллера 2-DOF (сплошная линия) с эффективностью контроллера 1-DOF, который вы хранили в качестве базовой линии (пунктирная линия).
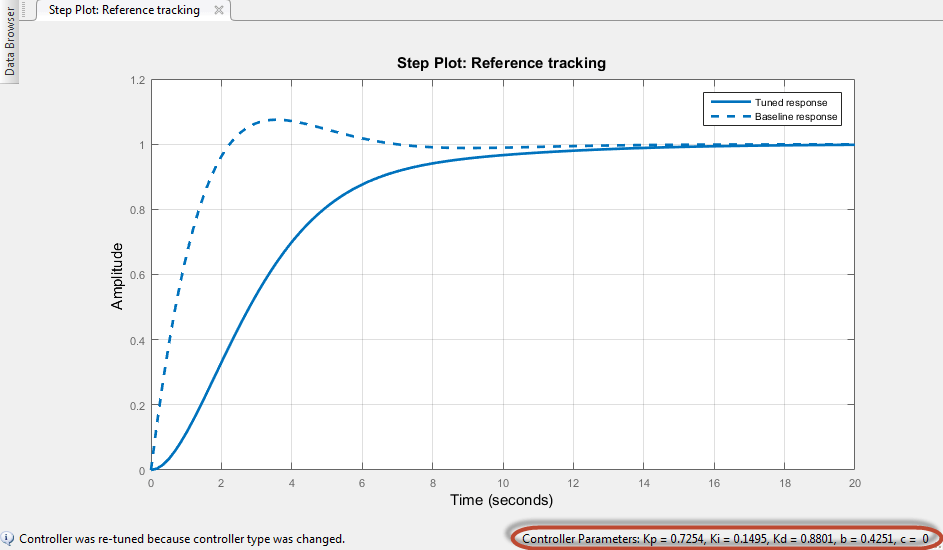
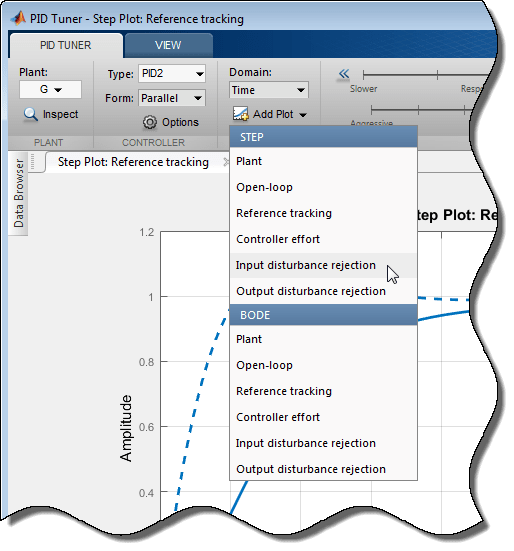
Добавление второй степени свободы устраняет перерегулирование в отслеживание уставки отклике. Затем добавьте переходный процесс, чтобы сравнить эффективность подавления помех двух контроллеров. Выберите Add Plot > Input Disturbance Rejection.
PID Tuner мозаику график подавления помех один за другим с графиком отслеживания уставки.
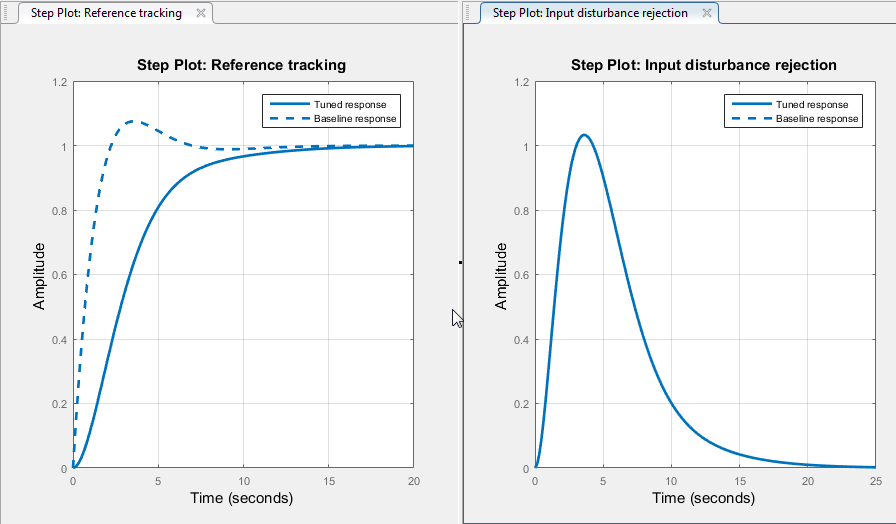
Подавление помех эффективности идентично обоим контроллерам. Таким образом, использование контроллера 2-DOF устраняет перерегулирование отслеживания уставки без каких-либо затрат на подавление помех.
Можно также улучшить подавление помех, изменив PID Tuner особое внимание проекта. Сначала щелкните стрелу Export![]() и выберите
и выберите Save as Baseline снова, чтобы задать контроллер 2-DOF в качестве базового уровня для сравнения.
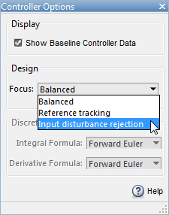
Измените особое внимание проекта PID Tuner, чтобы благоприятствовать отслеживанию уставки, не меняя время отклика или коэффициент переходного поведения. Для этого![]() нажмите Options, а в меню Focus выберите Input disturbance rejection
нажмите Options, а в меню Focus выберите Input disturbance rejection.
PID Tuner автоматически восстанавливает коэффициенты контроллера с особого внимания на подавление помех эффективности.
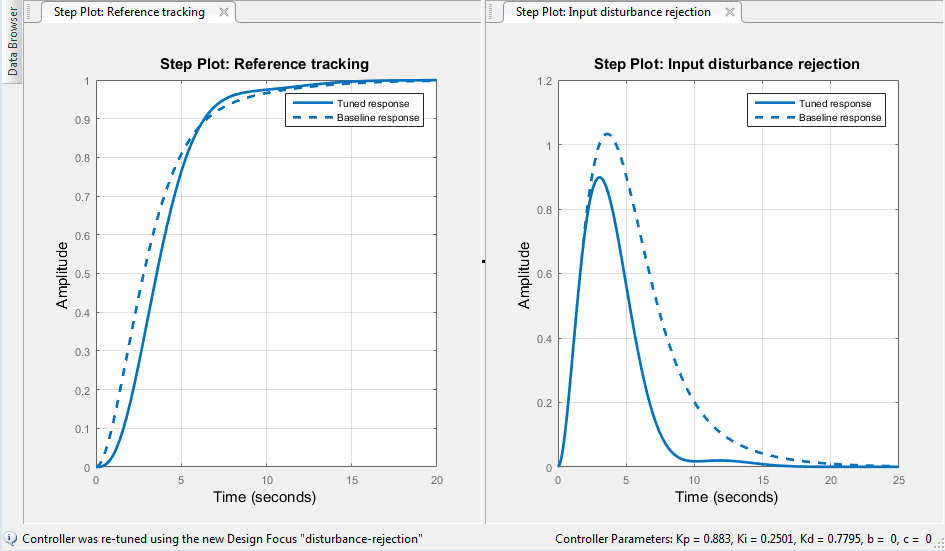
С сбалансированным особым вниманием проекта по умолчанию PID Tuner выбирает b значение от 0 до 1. Для этого объекта, когда вы меняете особое внимание проекта, чтобы способствовать подавлению помех, PID Tuner устанавливает b = 0 и c = 0. Таким образом, PID Tuner автоматически генерирует контроллер I-PD, чтобы оптимизировать для подавления помех. (Явное указание контроллера I-PD без установки особого внимания проекта приводит к аналогичному контроллеру.)
Графики отклика показывают, что с изменением особого внимания проекта, подавление помех дополнительно улучшается по сравнению с контроллером сбалансированного 2-DOF. Это улучшение происходит с некоторой жертвой эффективности отслеживания уставки, которая немного медленнее. Однако ответ отслеживания уставки все еще не имеет перерегулирования.
Таким образом, использование 2-DOF управления может улучшить подавление помех, не жертвуя такой же эффективностью отслеживания уставки, как и 1-DOF управление. Эти эффекты на производительности системы сильно зависят от свойств вашего объекта и скорости вашего контроллера. Для некоторых объектов и некоторых управляет полосами пропускания, использование 2-DOF управления или изменение особого внимания проекта оказывает меньше или не влияет на настроенный результат.
