В Toolbox™ Control System PID Tuner позволяет вам выполнить автоматическую интерактивную настройку ПИД-регуляторов для растений, представленных моделями LTI.
Для получения информации об использовании PID Tuner для настройки блока PID Controller в Simulink® модель, см. Введение в основанную на модели настройку ПИД в Simulink (Simulink Control Design).
Используйте PID Tuner для интерактивной разработки ПИД-контроллера SISO в пути feedforward одноконтурного строения управления с обратной связью.
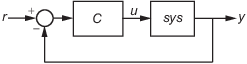
PID Tuner автоматически проектирует контроллер для вашего объекта. Вы задаете тип контроллера (P, I, PI, PD, PDF, PID, PIDF) и форму (параллельную или стандартную).
Можно также использовать PID Tuner для разработки 2-DOF ПИД-контроллера для настройки обратной связи на этом рисунке:
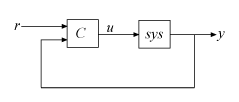
PID Tuner можете проектировать 2-DOF ПИД-регуляторы, в которой веса уставок могут быть свободными и настраиваемыми параметрами. PID Tuner также можете проектировать контроллеры, в которых веса уставок фиксированы в общих строениях управления, таких как I-PD и PI-D.
Можно проанализировать проект с помощью различных графиков отклика и в интерактивном режиме настроить проект так, чтобы он соответствовал вашим требованиям к эффективности.
Чтобы запустить PID Tuner, используйте pidTuner команда:
pidTuner(sys,type)
где sys является линейной моделью объекта, которым вы хотите управлять, и type указывает тип проектируемого контроллера.
Кроме того, введите
pidTuner(sys,Cbase)
где Cbase является базовым контроллером, позволяющим сравнивать эффективность проектируемого контроллера с эффективностью Cbase.
Для получения дополнительной информации о sys и Cbase, см. pidTuner страница с описанием.
Примечание
Можно также открыть PID Tuner из MATLAB® рабочего стола, на вкладке Apps. Когда вы делаете это, используйте меню Plant в PID Tuner, чтобы задать свою модель объекта управления.
Чтобы выбрать тип контроллера, используйте один из следующих методов:
Задайте тип при открытии приложения - Предоставьте type аргумент в pidTuner команда, когда вы открываете PID Tuner. Для примера, pidTuner(G,'PIDF2') открывает PID Tuner с начальным дизайном, который является 2-DOF ПИД-регуляторами с фильтром на производном члене.
Задайте тип с существующим объектом контроллера - Предоставьте базовый контроллер Cbase аргумент в pidTuner команда, когда вы открываете PID Tuner. PID Tuner проектирует контроллер того же типа, что и Cbase. Например, предположим C0 является pid объект контроллера, который имеет только пропорциональное и производное действие (PD-контроллер). Затем, pidTuner(G,C0) открывает PID Tuner с начального проекта, которая является PD- контроллера.
Укажите тип контроллера в приложении - В PID Tuner используйте меню Type, чтобы изменить типы контроллера.
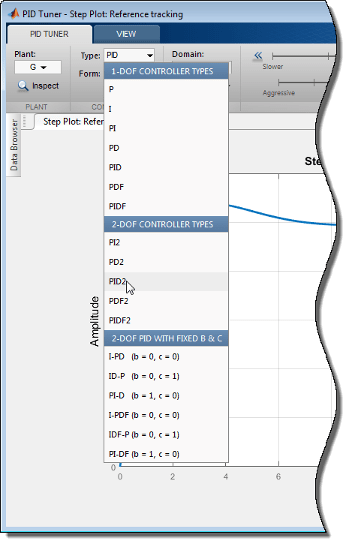
В следующих таблицах представлены доступные типы ПИД-регуляторов. Для получения дополнительной информации об этих типах контроллеров см. ПИД-регулятор типов для настройки.
type вход в pidTuner | Запись в Type меню | Действия контроллера |
|---|---|---|
'P' | P | Пропорциональный только |
'I' | I | Только интеграл |
'PI' | PI | Пропорциональный и интегральный |
'PD' | PD | Пропорциональный и производная |
'PDF' | PDF | Пропорциональная и производная с фильтром первого порядка на производном члене |
'PID' | PID | Пропорциональная, интегральная и производная |
'PIDF' | PIDF | Пропорциональная, интегральная и производная с фильтром первого порядка на производном члене |
PID Tuner можете автоматически проектировать 2-DOF типа ПИД-регулятора со свободными весами уставок. В следующей таблице представлены типы 2-DOF контроллеров в PID Tuner. Для получения дополнительной информации об 2-DOF ПИД-регуляторах в целом см. ПИД-регуляторы с двумя степенями свободы.
type вход в pidTuner | Запись в Type меню | Действия контроллера |
|---|---|---|
'PI2' | PI2 | 2-DOF пропорциональный и интегральный |
'PD2' | PD2 | 2-DOF пропорциональный и производный |
'PDF2' | PDF2 | 2-DOF пропорциональную и производную с фильтром первого порядка на производном члене |
'PID2' | PID2 | 2-DOF пропорциональный, интегральный и производная |
'PIDF2' | PIDF2 | 2-DOF пропорциональную, интегральную и производную с фильтром первого порядка на производном члене |
Используйте PID Tuner для разработки типов контроллеров с фиксированной уставкой и весом, представленных в следующей таблице. Для получения дополнительной информации об этих типах контроллеров см. ПИД-регулятор типов для настройки.
type вход в pidTuner | Запись в Type меню | Действия контроллера |
|---|---|---|
'I-PD' | I-PD | 2-DOF ПИД с b = 0, c = 0 |
'I-PDF' | I-PDF | 2-DOF PIDF с b = 0, c = 0 |
'ID-P' | ID-P | 2-DOF ПИД с b = 0, c = 1 |
'IDF-P' | IDF-P | 2-DOF PIDF с b = 0, c = 1 |
'PI-D' | PI-D | 2-DOF ПИД с b = 1, c = 0 |
'PI-DF' | PI-DF | 2-DOF PIDF с b = 1, c = 0 |
Если sys является моделью в дискретном времени с шагом расчета Ts, PID Tuner проектирует дискретное время pid контроллер, использующий ForwardEuler формула дискретного интегратора. Чтобы спроектировать контроллер, который имеет различные дискретные формулы интегратора, используйте один из следующих методов:
Предоставьте контроллер базового уровня в дискретном времени Cbase в команду launch pidTuner. PID Tuner проектирует контроллер, который имеет те же дискретные формулы интегратора, что и Cbase.
После запуска PID Tuner нажмите Options, чтобы открыть диалоговое окно Controller Options. Выберите дискретные формулы интегратора из меню Integral Formula и Derivative Formula.
Для получения дополнительной информации о дискретных формулах интегратора см. pid, pid2, pidstd, и pidstd2 страницы с описанием.
Когда вы используете type вход в pidTunerPID Tuner проектирует контроллер в параллельной форме. Чтобы спроектировать контроллер в стандартной форме, используйте один из следующих методов:
Предоставьте базовый контроллер стандартной формы Cbase в команду launch pidTuner. PID Tuner проектирует контроллер той же формы, что и Cbase.
Используйте меню Form, чтобы изменить форму контроллера после запуска PID Tuner.
Для получения дополнительной информации о параллельных и стандартных формах контроллеров смотрите pid, pid2, pidstd, и pidstd2 страницы с описанием.
