Экспорт сценария вождения в файл OpenDRIVE или ASAM OpenSCENARIO
export( экспортирует дороги, полосы, соединения и актёров в сценарии вождения в OpenDRIVE® 1.4H формат файла, описывающий статическое содержимое сценария вождения. Между исходным сценарием и экспортированным сценарием могут быть изменения. Для получения дополнительной информации смотрите Ограничения.scenario,'OpenDRIVE',filename)
export( экспортирует дорожную сеть, субъектов и траектории в сценарии вождения в ASAM OpenSCENARIO® 1.0 формат файла, описывающий динамическое содержимое сценария вождения. Экспорт в файл ASAM OpenSCENARIO также экспортирует несколько файлов данных. Дополнительные сведения см. в разделе Файлы данных, экспортированные с файлом ASAM OpenSCENARIO.scenario,'OpenSCENARIO',filename)
Создайте сценарий вождения.
inputScenario = drivingScenario;
Импорт дорожной сети OpenStreetMap в сценарий вождения. Для получения дополнительной информации о файле osm см. [1].
fileName = 'chicago.osm'; roadNetwork(inputScenario,'OpenStreetMap',fileName);
Экспорт в файл OpenDRIVE.
fileName = 'chicago.xodr'; export(inputScenario,'OpenDRIVE',fileName);
Warning: There may be minor variation between the actual driving scenario and the exported OpenDRIVE road networks. For more information, see <a href="matlab:helpview(fullfile(docroot,'toolbox','driving','helptargets.map'),'exportOpenDriveCLI')">export</a>.
Чтение экспортированного файла OpenDRIVE с помощью roadNetwork функция.
scenario = drivingScenario;
roadNetwork(scenario,'OpenDRIVE',fileName);Постройте график экспортированного сценария. Заметьте, что отображение экспортированной дорожной сети поворачивается вдоль размерностей x и y и не имеет линий границы.
figure
plot(inputScenario)
zoom(2);
title('Actual Scenario')
figure
plot(scenario)
zoom(2);
title('Exported Scenario')
Приложение
[1] Файл osm загружается из https://www.openstreetmap.org, что обеспечивает доступ к данным карты, полученной из толпы, по всему миру. Данные лицензированы под лицензией Open Data Commons Open Database License (ODbL), https://opendatacommons.org/licenses/odbl/.
Создайте сценарий вождения с одной дорогой, имеющей S-кривую.
scenario = drivingScenario; roadcenters = [-35 20 0; -20 -20 0; 0 0 0; 20 20 0; 35 -20 0];
Создать полосы и добавить их к дороге.
lm = [laneMarking('Solid','Color','w') ... laneMarking('Dashed','Color','y') ... laneMarking('Dashed','Color','y') ... laneMarking('Solid','Color','w')]; ls = lanespec(3,'Marking',lm); road(scenario,roadcenters,'Lanes',ls);
Постройте график сценария.
plot(scenario)

Экспорт сети дорог в сценарии в файл OpenDRIVE.
fileName = 'scurveroad.xodr'; export(scenario,'OpenDRIVE',fileName)
Warning: There may be minor variation between the actual driving scenario and the exported OpenDRIVE road networks. For more information, see <a href="matlab:helpview(fullfile(docroot,'toolbox','driving','helptargets.map'),'exportOpenDriveCLI')">export</a>.
Файл OpenDRIVE можно импортировать в рабочее пространство MATLAB с помощью roadNetwork функция.
scenario = drivingScenario;
roadNetwork(scenario,'OpenDRIVE',fileName)
plot(scenario)
Создайте сценарий вождения.
scenario = drivingScenario('StopTime',6);Импортируйте дорожную сеть из файла OpenDRIVE в сценарий.
fileName = 'parking.xodr'; roadNetwork(scenario,'OpenDRIVE',fileName);
Добавьте автомобиля , оборудованного датчиком к сценарию. Установите траекторию, в которой транспортное средство двигается по кривой с меняющейся скоростью.
egoVehicle = vehicle(scenario,'ClassID',1);
waypoints = [-80 43; -34 29; -18 15; -10 -2; 4 -17; 38 -24; 52 -20];
speed = [50 20 20 20 20 50 50];
trajectory(egoVehicle,waypoints,speed);Добавьте актёра, не являющегося эго, и установите его на нерест во время симуляции, задав значение времени входа. Сгенерируйте траекторию для актёра, не являющегося эго.
truck = vehicle(scenario,'ClassID',2,'Position',[4 -17 0],'EntryTime',3); waypoints = [4 -17; 20 -24; 38 -24; 60 -16]; speed = [40 40 40 40]; trajectory(truck,waypoints,speed);
Постройте график сценария и запустите симуляцию. Наблюдайте, как транспортное средство замедляется, когда она движется по кривой.
plot(scenario,'Waypoints','on'); while advance(scenario) pause(0.01) end

Экспорт сценария в файл ASAM OpenSCENARIO.
export(scenario,'OpenSCENARIO','parking.xosc');
Warning: Exported road network to OpenDRIVE may have minor variations than actual road network in the scenario. For more information, see <a href="matlab:helpview(fullfile(docroot,'toolbox','driving','helptargets.map'),'exportOpenDriveCLI')">export</a>.
Ограничения экспорта OpenDRIVE
Дороги
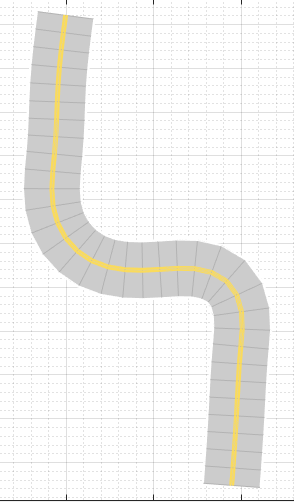
Кубический полином и параметрические типы кубической полиномиальной геометрии в сценарии экспортируются как спиральные типы геометрии. Это приводит к некоторым изменениям в экспортированной геометрии дороги, если дорога является изогнутой дорогой. Для примера на рисунке ниже заметьте, что острые углы на вход дороге стали относительно гладкими при экспорте в формат OpenDRIVE.
| Входная дорога | Экспортированная дорога OpenDRIVE |
|
|
|
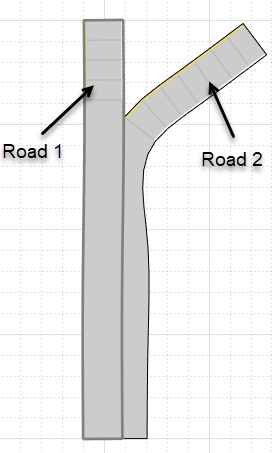
Когда сегменты смежных дорог перекрываются друг с другом, функция не экспортирует перекрывающиеся сегменты дорог.
| Входные дороги | Экспортированные дороги OpenDRIVE |
|
|
|
Переулки
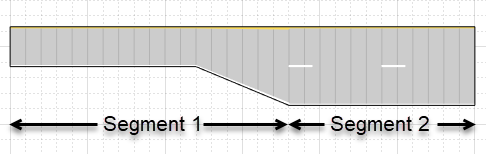
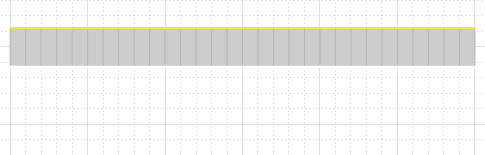
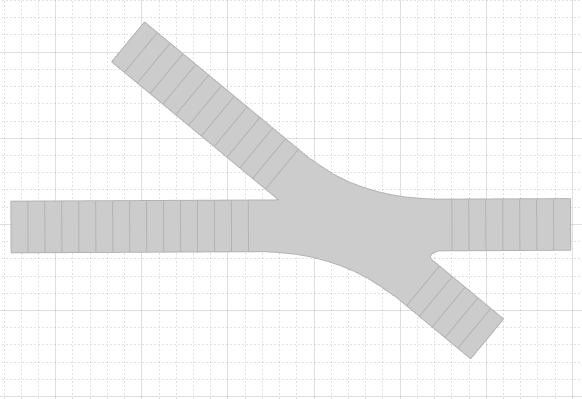
Когда дорога с несколькими спецификациями маршрута имеет любой сегмент, содержащий только одну полосу, функция не экспортирует несколько спецификаций маршрута. Вместо этого спецификации первого сегмента дороги применяются ко всей дороге при экспорте.
| Входная дорога | Экспортированная дорога OpenDRIVE |
Первый сегмент первоначальной дороги имеет только одну полосу.
| Вся экспортируемая дорога имеет ту же спецификацию, что и первый сегмент входа дороги.
|
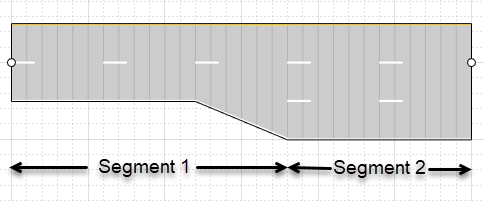
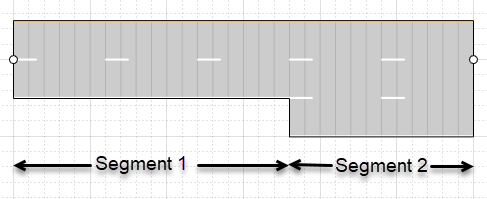
Когда дорога с несколькими спецификациями маршрута содержит конус между двумя сегментами дороги, функция экспортирует дорогу без конуса.
| Входная дорога | Экспортированная дорога OpenDRIVE |
|
|
|
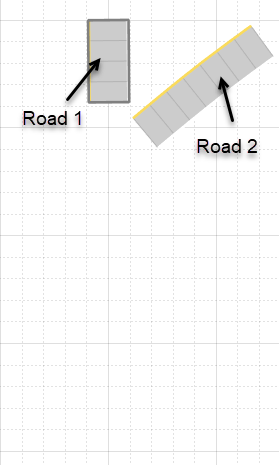
Когда дорога, состоящая из нескольких сегментов, соединяется с соединением, функция не экспортирует дорогу.
Соединения
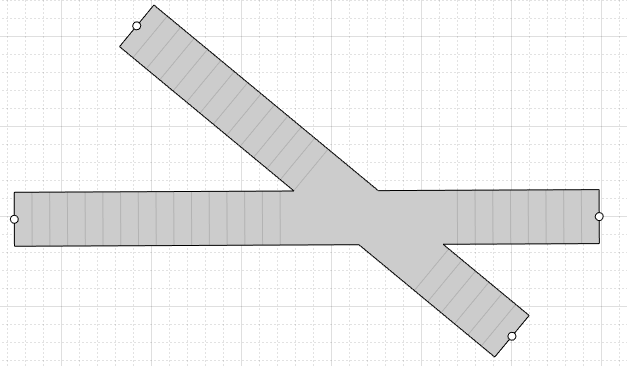
Соединения дорожной сети обрабатываются без информации о соединении маршрута, поэтому формы соединений могут быть неточными в экспортированном сценарии.
| Входная дорога | Экспортированная дорога OpenDRIVE |
|
|
|
Актеры
The export функция не экспортирует актёра, который присутствует ни на соединении, ни на дороге с несколькими сегментами дороги.
При экспорте пользовательского актёра функция устанавливает тип объекта равным 'none'.
Импорт OpenDRIVE
При экспорте объекта сценария вождения, содержащего импортированный сценарий OpenDRIVE, ограничения импорта OpenDRIVE применяются к экспорту OpenDRIVE. Можно импортировать сценарий OpenDRIVE в drivingScenario объект при помощи roadNetwork функция. Для получения информации об ограничениях импорта OpenDRIVE смотрите roadNetwork.