Добавить дорожную сеть в сценарий вождения
roadNetwork( использует пару "имя-значение" scenario,'OpenDRIVE','ShowLaneTypes',showLaneTypes)'ShowLaneTypes' для импорта информации о типах маршрутов из файла и отображения ее в сценарии вождения.
roadNetwork( импортирует дороги из Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0)[2] дорожная сеть в сценарий вождения. Функция импортирует дороги, которые ближе всего к координатам широты и долготы, заданным в scenario,'ZenrinJapanMap',lat,lon)lat и lon, соответственно.
Для импорта дорог из Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) данных требуется пакет поддержки Automated Driving Toolbox™ Importer for Zenrin Japan Map API 3.0 (Itsumo NAVI 3.0) Service. Для получения информации об установке пакетов поддержки см. раздел «Получение и управление дополнениями».
Создайте пустой сценарий вождения.
scenario = drivingScenario;
Импортируйте дорожную сеть OpenDRIVE в сценарий.
filePath = 'intersection.xodr'; roadNetwork(scenario,'OpenDRIVE',filePath);
Постройте график сценария и увеличьте изображение сети дорог путем установки пределов осей.
plot(scenario) xlim([350 800]) ylim([1400 2000]) zlim([0.00 10.00])

Создайте пустой сценарий вождения.
scenario = drivingScenario;
Импортируйте в сценарий дорогу OpenDRIVE, состоящую из движущихся и парковочных полос. По умолчанию функция интерпретирует информацию о типе маршрута и импортирует полосы в сценарий вождения без изменения типа маршрута.
filePath = 'parking.xodr'; roadNetwork(scenario,'OpenDRIVE',filePath);
Постройте график сценария.
plot(scenario) zoom(2) legend('Driving lane','Parking lane')

Импортируйте дорогу OpenDRIVE в сценарий. Установите 'ShowLaneTypes' значение в false для подавления нескольких типов маршрутов. Функция игнорирует информацию о типе маршрута и импортирует все полосы как движущиеся полосы.
scenario = drivingScenario; roadNetwork(scenario,'OpenDRIVE',filePath,'ShowLaneTypes',false); plot(scenario) zoom(2)

Импорт данных дорожной сети HERE HDLM, наиболее близких к координатам заданного маршрута движения, в сценарий вождения. Постройте график транспортного средства, следующего по этому маршруту, в сценарии вождения.
Загрузка последовательности географических координат, соответствующих движущему маршруту.
data = load('geoSequence.mat');
lat = data.latitude;
lon = data.longitude;
Отображение маршрута путем потоковой передачи координат на географическом проигрывателе. Установите уровень масштаба равный 14 и сконфигурируйте игрока, чтобы отобразить все точки в его истории. Чтобы ускорить потоковую передачу, постройте график только каждой десятой координаты в маршруте.
zoomLevel = 14; player = geoplayer(lat(1),lon(1),zoomLevel,'HistoryDepth',Inf); timestep = 10; for i = 1:timestep:length(lat) plotPosition(player,lat(i),lon(i)); end

Создайте сценарий вождения. Импортируйте в сценарий данные дорог HERE HDLM, которые наиболее близки к маршруту движения.
scenario = drivingScenario;
roadNetwork(scenario,'HEREHDLiveMap',lat,lon);
Используйте latlon2localGeoReference свойство сценария. Это источник является первой координатой, заданной в маршруте движения. Поскольку маршрут движения содержит только широтные и продольные данные, установите высоту равной 0.
alt = 0; origin = scenario.GeoReference; [xEast,yNorth,zUp] = latlon2local(lat,lon,alt,origin);
Добавить транспортное средство в сценарий вождения. Задайте преобразованный маршрут движения как траекторию транспортного средства. Установите скорость транспортного средства 30 метров в секунду.
v = vehicle(scenario,'ClassID',1);
speed = 30;
smoothTrajectory(v,[xEast,yNorth,zUp],speed);
Постройте график и приостановите каждые 0,01 секунды, чтобы замедлить симуляцию. Чтобы сохранить то же выравнивание с отображениями географических координат, ось X находится снизу, а ось Y - слева. В сценариях вождения, не импортированных с карт, ось X находится слева, а ось Y - снизу. Это выравнивание соответствует системе координат Automated Driving Toolbox™ world.
Через несколько секунд транспортное средство, по-видимому, едет под дорогу. Эта проблема возникает, потому что преобразованная траектория не содержит данных о высоте, но импортированная дорожная сеть. Чтобы избежать этой проблемы, если вы задаете маршрут движения, записанный из GPS, включите данные о высоте.
plot(scenario) while advance(scenario) pause(0.01) end

Импорт данных дорожной сети HERE HDLM в сценарий вождения. Выберите эти данные из области с центром вокруг заданной географической координаты.
Задайте координаты широты и долготы, соответствующие круговому перекрестку.
latCenter = 42.302324; lonCenter = -71.384970;
Задайте минимальную и максимальную широтную и продольную координаты для прямоугольной области вокруг кругового перекрестка. Отображение ограничивающего прямоугольника, соответствующего этой области, на географическом графике.
offset = 5e-4; minLat = latCenter - offset; minLon = lonCenter - offset; maxLat = latCenter + offset; maxLon = lonCenter + offset; gx = geoaxes; LineSpec = '.-k'; geoplot(gx, ... [minLat maxLat],[minLon minLon],LineSpec, ... [maxLat maxLat],[minLon maxLon],LineSpec, ... [maxLat minLat],[maxLon maxLon],LineSpec, ... [minLat minLat],[maxLon minLon],LineSpec)

Создайте сценарий вождения и импортируйте дороги из области с помощью минимальной и максимальной координат. The roadNetwork функция импортирует дороги, которые находятся по крайней мере частично в этой области.
scenario = drivingScenario;
roadNetwork(scenario,'HEREHDLiveMap',minLat,minLon,maxLat,maxLon);Постройте график сценария. Чтобы сохранить то же выравнивание с отображениями географических координат, ось X находится снизу, а ось Y - слева. В сценариях вождения, не импортированных с карт, ось X находится слева, а ось Y - снизу. Это выравнивание соответствует системе координат Automated Driving Toolbox™ world.
plot(scenario)

Импортируйте дороги из веб-сервиса OpenStreetMap ® в сценарий вождения. Затем постройте транспортное средство, идущее по маршруту, во импортной дорожной сети.
Импорт дорожной сети кампуса MathWorks ® Apple Hill в пустой сценарий вождения. Файл был загружен из https://www.openstreetmap.org, что обеспечивает доступ к картографическим данным, полученным по всему миру. Данные лицензированы под лицензией Open Data Commons Open Database License (ODbL), https://opendatacommons.org/licenses/odbl/.
Постройте график импортированной дорожной сети. Чтобы сохранить то же выравнивание с отображениями географических координат, ось X находится снизу, а ось Y - слева. В сценариях вождения, не импортированных с карт, ось X находится слева, а ось Y - снизу. Это выравнивание соответствует системе координат Automated Driving Toolbox™ world.
scenario = drivingScenario; roadNetwork(scenario,'OpenStreetMap','applehill.osm'); plot(scenario)

Загрузите координаты широты и долготы для ведущего маршрута в этой дорожной сети.
data = load('geoRouteAH.mat');
lat = data.latitude;
lon = data.longitude;
Используйте latlon2localGeoReference свойство сценария. Это источник является первой координатой, заданной в маршруте движения. Поскольку маршрут движения содержит только широтные и продольные данные, установите высоту равной 0.
alt = 0; origin = scenario.GeoReference; [xEast,yNorth,zUp] = latlon2local(lat,lon,alt,origin);
Добавить транспортное средство в сценарий вождения. Задайте преобразованный маршрут движения как траекторию транспортного средства. Установите скорость транспортного средства 30 метров в секунду. Стройте график траектории транспортного средства и пауза каждые 0,01 секунды, чтобы замедлить симуляцию.
v = vehicle(scenario,'ClassID',1); speed = 30; smoothTrajectory(v,[xEast,yNorth,zUp],speed); while advance(scenario) pause(0.01) end

Импортируйте данные дорожной сети Zenrin Japan Map 3.0 (Itsumo NAVI API 3.0), которая находится ближе всего к координатам заданного маршрута вождения, в сценарий вождения. Постройте график транспортного средства, следующего по этому маршруту, в сценарии вождения.
Загрузка последовательности географических координат, соответствующих движущему маршруту.
data = load('tokyoSequence.mat');
lat = data.latitude;
lon = data.longitude;Отображение маршрута путем потоковой передачи координат на географическом проигрывателе. Установите уровень масштаба равный 17 и сконфигурируйте игрока, чтобы отобразить все точки в его истории. Чтобы ускорить потоковую передачу, постройте график только каждой десятой координаты в маршруте.
zoomLevel = 17; player = geoplayer(lat(1),lon(1),zoomLevel,'HistoryDepth',Inf); timestep = 10; for i = 1:timestep:length(lat) plotPosition(player,lat(i),lon(i)); end

Создайте сценарий вождения. Импортируйте в сценарий данные о дороге Zenrin Japan Map 3.0 (Itsumo NAVI API 3.0), которая находится ближе всего к маршруту движения.
scenario = drivingScenario;
roadNetwork(scenario,'ZenrinJapanMap',lat,lon)Используйте latlon2local функция для преобразования маршрута движения из географических координат в локальные Декартовы координаты востока-севера вверх (ENU), используемые в сценарии вождения. Для начала системы координат ENU используйте источник дорожной сети, хранящийся в GeoReference свойство сценария. Это источник является первой координатой, заданной в маршруте движения.
alt = 0; origin = scenario.GeoReference; [xEast,yNorth,zUp] = latlon2local(lat,lon,alt,origin);
Добавить транспортное средство в сценарий вождения. Задайте преобразованный маршрут движения как траекторию транспортного средства. Установите скорость транспортного средства 30 метров в секунду.
v = vehicle(scenario,'ClassID',1);
speed = 30;
smoothTrajectory(v,[xEast,yNorth,zUp],speed);Постройте график и приостановите каждые 0,01 секунды, чтобы замедлить симуляцию. Чтобы сохранить то же выравнивание с отображениями географических координат, ось X находится снизу, а ось Y - слева. В сценариях вождения, не импортированных с карт, ось X находится слева, а ось Y - снизу. Это выравнивание соответствует системе координат Automated Driving Toolbox™ world.
figure plot(scenario) while advance(scenario) pause(0.01) end

Импорт данных дорожной сети Zenrin Japan Map 3.0 (Itsumo NAVI API 3.0) в сценарий вождения. Выберите эти данные из области с центром вокруг заданной географической координаты.
Задайте координаты широты и долготы, соответствующие парку.
latCenter = 35.6889; lonCenter = 139.8458;
Задайте минимальную и максимальную координаты широты и долготы для прямоугольной области вокруг парка. Отображение ограничивающего прямоугольника, соответствующего этой области, на географическом графике.
offset = 0.0013; minLat = latCenter - offset; minLon = lonCenter - offset; maxLat = latCenter + offset; maxLon = lonCenter + offset; figure gx = geoaxes; LineSpec = '.-k'; geoplot(gx, ... [minLat maxLat],[minLon minLon],LineSpec, ... [maxLat maxLat],[minLon maxLon],LineSpec, ... [maxLat minLat],[maxLon maxLon],LineSpec, ... [minLat minLat],[maxLon minLon],LineSpec)

Создайте сценарий вождения и импортируйте дороги из области с помощью минимальной и максимальной координат. The roadNetwork функция импортирует дороги, которые находятся по крайней мере частично в этой области.
scenario = drivingScenario;
roadNetwork(scenario,'ZenrinJapanMap',minLat,minLon,maxLat,maxLon) Постройте график сценария. Чтобы сохранить то же выравнивание с отображениями географических координат, ось X находится снизу, а ось Y - слева. В сценариях вождения, не импортированных с карт, ось X находится слева, а ось Y - снизу. Это выравнивание соответствует системе координат Automated Driving Toolbox™ world.
figure plot(scenario)

scenario - Сценарий вожденияdrivingScenario объектСценарий вождения, заданный как drivingScenario объект. scenario не должны содержать ранее созданных или импортированных дорог.
filename - Имя файла дорожной сетиИмя файла дорожной сети в виде вектора символов или строкового скаляра.
filename необходимо указать файл в текущей папке, файл, находящийся в MATLAB® путь поиска файлов или полный или относительный путь к файлу.
filename должен заканчиваться расширением файла, допустимым для источника дорожной сети.
| Источник дорожной сети | Допустимые расширения файлов | Синтаксис примера |
|---|---|---|
| OpenDRIVE |
|
roadNetwork(scenario, ... 'OpenDRIVE','C:\Desktop\roads.xodr' |
| OpenStreetMap |
|
roadNetwork(scenario, ... 'OpenStreetMap','C:\Desktop\map.osm' |
showLaneTypes - Импорт информации о типах маршрутовtrue или 1 (по умолчанию) | false или 0Импортируйте информацию о типе маршрута из файла дорожной сети OpenDRIVE и отобразите ее в сценарии вождения, заданном как разделенная разделенными запятой парами, состоящая из 'ShowLaneTypes' и одно из следующих значений:
true или 1 - Импортируйте информацию о типах маршрутов и визуализируйте типы маршрутов.
false или 0 - игнорируйте информацию о типе маршрута и импортируйте все полосы как движущиеся полосы в сценарии вождения.
Таблица суммировала поддерживаемые типы маршрутов и их внешний вид по умолчанию после импорта их в сценарий вождения.
| Поддерживаемые типы маршрутов | Описание | Внешний вид по умолчанию |
| Движущиеся полосы | Полосы для вождения |
|
| Пограничные полосы | Полосы на границах дорог |
|
| Ограниченные полосы движения | Маршруты, зарезервированные для транспортных средств с высокой вместимостью |
|
| Плечевые дорожки | Полосы, зарезервированные для аварийной остановки |
|
| Парковочные полосы | Полосы рядом с движущимися полосами, предназначенные для стоянки транспортных средств |
|
Любые другие неподдерживаемые типы маршрутов отображаются как пограничные полосы.
Пример: 'ShowLaneTypes',false
lat - Координаты широтыКоординаты широты, заданные как вектор элементов в области значений [-90, 90]. lat должен быть того же размера, что и lon. Модули указаны в степенях.
lon - Координаты долготыКоординаты долготы, заданные как вектор элементов в области значений [-180, 180]. lon должен быть того же размера, что и lat. Модули указаны в степенях.
minLat - Минимальная координата широты ограничивающего прямоугольникаМинимальная координата широты ограничивающего прямоугольника, заданная в виде скаляра в области значений [-90, 90]. minLat должно быть меньше maxLat. Модули указаны в степенях.
roadNetwork функция импортирует все дороги, которые по крайней мере частично находятся внутри ограничивающего прямоугольника, заданного входами minLat, minLon, maxLat, и maxLon. Эта схема отображает связь между этими координатами.
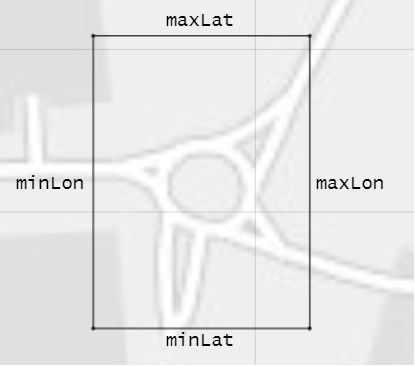
minLon - Минимальная координата долготы ограничивающего прямоугольникаМинимальная координата долготы ограничивающего прямоугольника, заданная в виде скаляра в области значений [-180, 180]. minLon должно быть меньше maxLon. Модули указаны в степенях.
roadNetwork функция импортирует все дороги, которые по крайней мере частично находятся внутри ограничивающего прямоугольника, заданного входами minLat, minLon, maxLat, и maxLon. Эта схема отображает связь между этими координатами.
maxLat - Максимальная координата широты ограничивающего прямоугольникаМаксимальная координата широты ограничивающего прямоугольника, заданная в виде скаляра в области значений [-90, 90]. maxLat должно быть больше minLat. Модули указаны в степенях.
roadNetwork функция импортирует все дороги, которые по крайней мере частично находятся внутри ограничивающего прямоугольника, заданного входами minLat, minLon, maxLat, и maxLon. Эта схема отображает связь между этими координатами.
maxLon - Максимальная координата долготы ограничивающего прямоугольникаМаксимальная координата долготы ограничивающего прямоугольника, заданная в виде скаляра в области значений [-180, 180]. maxLon должно быть больше minLon. Модули указаны в степенях.
roadNetwork функция импортирует все дороги, которые по крайней мере частично находятся внутри ограничивающего прямоугольника, заданного входами minLat, minLon, maxLat, и maxLon. Эта схема отображает связь между этими координатами.
Ограничения на импорт OpenDRIVE
Можно импортировать только полосы движения, информацию о типах маршрутов и дороги. Импорт дорожных объектов и дорожных сигналов не поддерживается.
Загрузка файлов OpenDRIVE, содержащих большие дорожные сети, может занять до нескольких минут. Примеры крупных дорожных сетей включают таковые, которые моделируют дороги города или таковых с дорогами длиной в тысячи метров.
Полосы с переменной шириной не поддерживаются. Ширина задается как самая высокая ширина, обнаруженная в этой полосе. Например, если ширина маршрута варьируется от 2 метров до 4 метров, функция устанавливает ширину маршрута равной 4 метрам на всем протяжении.
Дороги с информацией о типе маршрута, заданной как driving, border, restricted, shoulder, и parking поддерживаются. Полосы с любой другой информацией о типах маршрутов импортируются как пограничные полосы.
Дороги с несколькими стилями разметки маршрута не поддерживаются. Функция применяет первый найденный стиль разметки ко всем полосам движения. Для примера, если дорога Dashed и Solid разметка маршрута, функция применяется Dashed разметка маршрута на всем протяжении.
Стили разметки маршрута Bott Dots, Curbs, и Grass не поддерживаются. Полосы с этими стилями маркировки импортируются без маркировки.
ЗДЕСЬ Ограничения на импорт HD Live Map
Импорт дорог HERE HDLM с полосами различной ширины не поддерживается. В сгенерированной дорожной сети каждая дорожная полоса имеет максимальную ширину, найденную по всей ее длине. Рассмотрим HERE HDLM полосу с шириной, которая изменяется от 2 до 4 метров по ее длине. В сгенерированной дорожной сети ширина полосы 4 метра на всём протяжении. Это изменение дорожных сетей иногда может привести к перекрытию дорог в сценарии вождения.
Если вы получаете предупреждение о том, что геометрия дороги не может быть вычислена, то кривизна дороги является слишком резкой, чтобы она отображалась правильно, и она не импортируется.
Некоторые проблемы с импортированными дорогами могут быть связаны с отсутствующими или неточными данными карты в службе HERE HDLM. Например, вы можете увидеть черные линии, где дороги и соединения встречаются. Чтобы проверить, где проблема связана с данными карты, используйте HERE HD Live Map Viewer, чтобы просмотреть геометрию дорожной сети HERE HDLM. Для этого средства просмотра требуется действительная лицензия HERE. Для получения дополнительной информации смотрите сайт HERE Technologies.
Ограничения на импорт OpenStreetMap
При импорте данных OpenStreetMap функции дороги и маршрута имеют следующие ограничения:
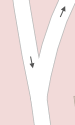
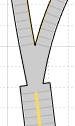
Информация об уровне маршрута не импортируется из дорог OpenStreetMap. Спецификации маршрута основаны только на направлении движения, указанном в дорожной сети OpenStreetMap, где:
Дороги с односторонним движением импортируются как однополосные дороги со спецификациями маршрута по умолчанию. Эти маршруты программно эквивалентны lanespec(1).
Двухсторонние дороги импортируются как двухполосные дороги с двунаправленными маршрутами и спецификациями по умолчанию. Эти маршруты программно эквивалентны lanespec([1 1]).
Таблица показывает эти различия в дорожной сети OpenStreetMap и дорожной сети в импортированном сценарии вождения.
| Дорожная сеть OpenStreetMap | Импортированный сценарий вождения |
|---|---|
|
|
При импорте дорожных сетей OpenStreetMap, которые задают данные о повышении, если данные о повышении не заданы для всех импортируемых дорог, сгенерированная дорожная сеть может содержать неточности, и некоторые дороги могут перекрываться.
Основная карта, используемая в приложении, может иметь небольшие различия от карты, используемой в сервисе OpenStreetMap. Некоторые импортированные дорожные проблемы могут также быть вызваны отсутствующими или неточными данными карты в службе OpenStreetMap. Чтобы проверить, отсутствуют ли или неточны данные из-за службы map, рассмотрите просмотр данных карты во внешнем средстве просмотра карт.
Если вы получаете предупреждение о том, что геометрия дороги не может быть вычислена, то кривизна дороги является слишком резкой, чтобы она отображалась правильно, и она не импортируется.
Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) Ограничения на импорт
При импорте данных Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) сгенерированная дорожная сеть имеет эти ограничения. В результате этих ограничений сгенерированная сеть может содержать неточности, а дороги могут перекрываться.
Сгенерированная дорожная сеть использует данные по повышению дорог, когда Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) предоставляет его. В противном случае сгенерированная сеть использует данные о повышении местности, предоставляемые услугой.
Когда сервис Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) предоставляет информацию с использованием области значений, например, путем определения дороги с двумя-тремя полосами или дороги с шириной 3-5,5 метра, сгенерированная дорожная сеть вместо этого использует скалярные значения. Рассмотрим дорогу Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0), которая имеет две-три полосы. Сгенерированная дорожная сеть имеет две полосы.
Полосы в пределах дорог в сгенерированной сети имеют равномерную ширину. Рассмотрим дорогу шириной 4,25 метра с двумя полосами. В сгенерированной дорожной сети каждый ряд имеет ширину 2,125 метра.
Если вы получаете предупреждение о том, что геометрия дороги не может быть вычислена, то кривизна дороги является слишком резкой, чтобы она отображалась правильно, и она не импортируется.
Там, где это возможно, созданная дорожная сеть использует имена дорог, предоставляемые службой Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0). В противном случае сгенерированная дорожная сеть использует имена по умолчанию, такие как Road1 и Road2.
Если дороги, которые вы импортируете, выглядят не так, как ожидалось, рассмотрите их импорт с помощью приложения Driving Scenario Designer. Приложение может сделать процесс устранения неполадок и исправления дорог более простым, чем попытка диагностировать и исправить их с помощью roadNetwork функция.
[1] Dupuis, Marius, et al. Спецификация формата OpenDRIVE. Редакция 1.4, Выпуск H, № документа VI2014.106. Bad Aibling, Германия: VIRES Simulationstechnologie GmbH, 4 ноября 2015 года.
[1] Вам необходимо заключить отдельное соглашение с HERE в порядок получения доступа к сервисам HDLM и получения необходимых учетных данных (access_key_id и access_key_secret) для использования сервиса HERE.
[2] Чтобы получить доступ к сервису Zenrin Japan Map API 3.0 (Itsumo NAVI API 3.0) и получить необходимые учетные данные (идентификатор клиента и секретный ключ), необходимо заключить отдельное соглашение с ZENRIN DataCom CO., LTD.