Вычислите команду угла поворота для следования пути с помощью метода Стэнли
steerCmd = lateralControllerStanley(refPose,currPose,currVelocity)
Контроллер вычисляет команду угла рулевого управления с помощью метода Стэнли [1], закон управления которого основан на кинематической модели велосипеда. Используйте этот контроллер для следования пути в низкоскоростных окружениях, где инерционные эффекты минимальны.
steerCmd = lateralControllerStanley(refPose,currPose,currVelocity,Name,Value)lateralControllerStanley(refPose,currPose,currVelocity,'Direction',-1) вычисляет команду угла поворота для транспортного средства в обратном движении.
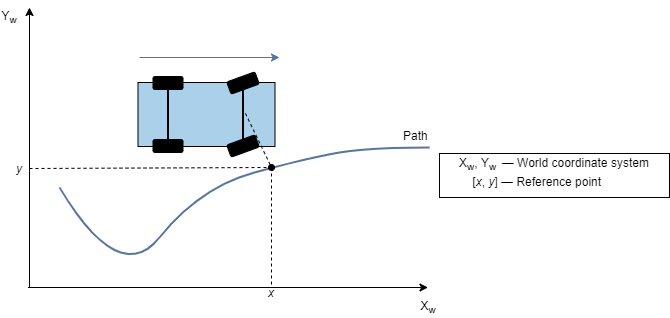
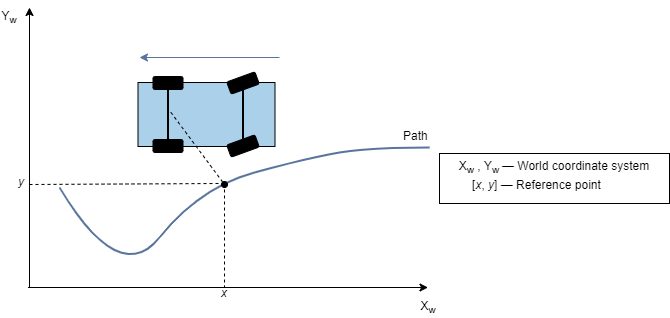
refPose - Эталонное положениеСсылочное положение, заданное как вектор [x, y, Θ]. x и y в метрах, а Θ в степенях.
x и y задайте точку ссылки, к которой нужно направить транспортному средству. Θ задает угол ориентации пути в этой контрольной точке и положительный в направлении против часовой стрелки.
Для транспортного средства движения вперед ссылки точка является точкой на пути, которая находится ближе всего к центру транспортного средства передней оси.
Для транспортного средства обратного движения точка ссылки является точкой на пути, которая находится ближе всего к центру транспортного средства задней оси.
Типы данных: single | double
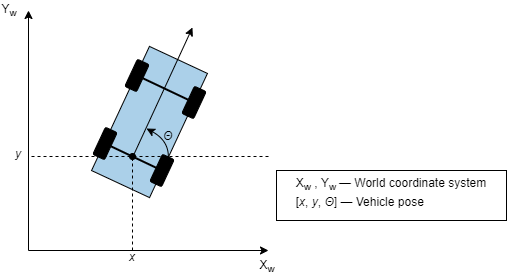
currPose - Положение токаПоложение тока транспортного средства, заданное как вектор [x, y, Θ]. x и y в метрах, а Θ в степенях.
x и y определяют местоположение транспортного средства, которое определяется как центр задней оси транспортного средства.
Θ задает угол ориентации транспортного средства в местоположении (x, y) и положительный в направлении против часовой стрелки.
Для получения дополнительной информации о положении транспортного средства смотрите Системы координат в Automated Driving Toolbox.
Типы данных: single | double
currVelocity - Текущая продольная скоростьТекущая продольная скорость транспортного средства, заданная как действительный скаляр. Модули указаны в метрах в секунду.
Если транспортное средство находится в движении вперед, это значение должно быть больше 0.
Если транспортное средство находится в обратном движении, это значение должно быть меньше 0.
Значение 0 представляет транспортное средство, которое не находится в движении.
Типы данных: single | double
Задайте необязательные разделенные разделенными запятой парами Name,Value аргументы. Name - имя аргумента и Value - соответствующее значение. Name должны находиться внутри кавычек. Можно задать несколько аргументов в виде пар имен и значений в любом порядке Name1,Value1,...,NameN,ValueN.
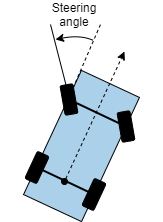
'MaxSteeringAngle',25steerCmd - Команда угла поворота руляКоманда угла поворота, в степенях, возвращается как действительный скаляр. Это значение положительно в направлении против часовой стрелки.
Для получения дополнительной информации смотрите Системы координат в Automated Driving Toolbox.
Чтобы вычислить команду угла поворота, контроллер минимизирует ошибку положения и ошибку угла текущего положения относительно положения ссылки. Направление движения транспортного средства определяет эти значения ошибки.
Когда транспортное средство находится в движении вперед ('Direction' Пара "имя-значение" 1):
Значение position error является боковым расстоянием от центра передней оси до контрольной точки на пути.
Это angle error угол переднего колеса относительно ссылку пути.
Когда транспортное средство находится в обратном движении ('Direction' Пара "имя-значение" -1):
Значение position error является боковым расстоянием от центра задней оси до контрольной точки на пути.
Это angle error угол заднего колеса относительно ссылку пути.
Для получения дополнительной информации о том, как контроллер минимизирует эти ошибки, смотрите [1].
[1] Гофман, Габриэль М., Клэр Дж. Томлин, Майкл Монтемерло и Себастьян Трун. Autonomobile Automobile Trajectory Tracking for Off-Road Driving: Проектирование контроллера, Experimental Validation and Racing (неопр.) (недоступная ссылка). Американская контрольная конференция. 2007, стр 2296–2301. doi:10.1109/ACC.2007.4282788
