Управляйте углом рулевого управления транспортного средства для следования пути с помощью метода Стэнли
Автоматизированное Приводное Транспортное средство
Блок Lateral Controller Stanley вычисляет команду угла поворота, в степени, которая настраивает текущее положение транспортного средства так, чтобы оно совпадало с положением ссылки, учитывая транспортное средство скорость и направление тока. Контроллер вычисляет эту команду с помощью метода Стэнли [1], закон управления которого основан как на кинематической, так и на динамической модели велосипеда. Чтобы измениться между моделями, используйте параметр Vehicle model.
Кинематическая модель велосипеда подходит для следования по пути в низкоскоростных окружениях, таких как парковки, где инерционные эффекты минимальны.
Динамическая модель велосипеда подходит для следования по пути в высокоскоростных окружениях, таких как шоссе, где инерционные эффекты более выражены. Эта модель транспортного средства обеспечивает дополнительные параметры, которые описывают динамику транспортного средства.
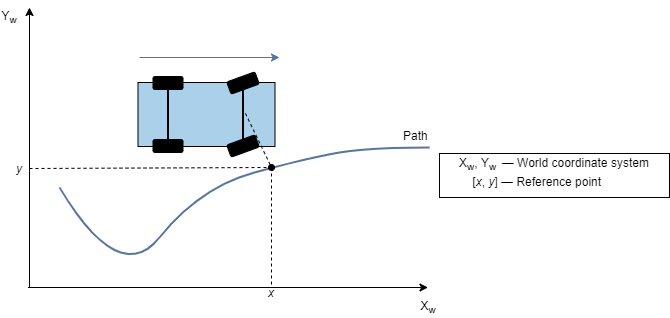
RefPose - Эталонное положениеСсылочное положение, заданное как вектор [x, y, Θ]. x и y в метрах, а Θ в степенях.
x и y задайте точку ссылки, к которой нужно направить транспортному средству. Θ задает угол ориентации пути в этой контрольной точке и положительный в направлении против часовой стрелки.
Для транспортного средства движения вперед ссылки точка является точкой на пути, которая находится ближе всего к центру транспортного средства передней оси.
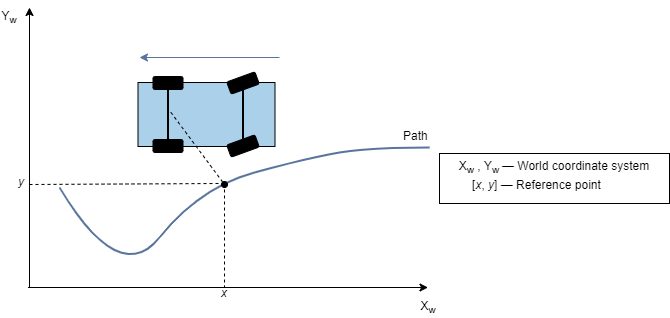
Для транспортного средства обратного движения точка ссылки является точкой на пути, которая находится ближе всего к центру транспортного средства задней оси.
Типы данных: single | double
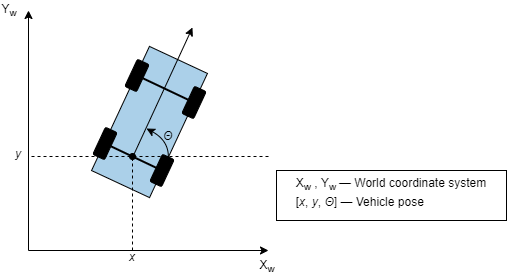
CurrPose - Положение токаПоложение тока транспортного средства, заданное как вектор [x, y, Θ]. x и y в метрах, а Θ в степенях.
x и y определяют местоположение транспортного средства, которое определяется как центр задней оси транспортного средства.
Θ задает угол ориентации транспортного средства в местоположении (x, y) и положительный в направлении против часовой стрелки.
Для получения дополнительной информации о положении транспортного средства смотрите Системы координат в Automated Driving Toolbox.
Типы данных: single | double
CurrVelocity - Текущая продольная скоростьТекущая продольная скорость транспортного средства, заданная как действительный скаляр. Модули указаны в метрах в секунду.
Если транспортное средство находится в движении вперед, это значение должно быть больше 0.
Если транспортное средство находится в обратном движении, это значение должно быть меньше 0.
Значение 0 представляет транспортное средство, которое не находится в движении.
Типы данных: single | double
Direction - Направление движения транспортного средства1 (движение вперед) | -1 (обратное движение)Направление движения транспортного средства, заданное как 1 для движения вперед или -1 для обратного движения. Направление движения определяет ошибку положения и ошибку угла, используемые для вычисления команды угла поворота руля. Для получения дополнительной информации см. «Алгоритмы».
Curvature - Кривизна путиКривизна пути в ссылку точке, в радианах на метр, заданная как действительный скаляр.
Для транспортного средства движения вперед ссылки точка является точкой на пути, которая находится ближе всего к центру транспортного средства передней оси.
Для транспортного средства обратного движения точка ссылки является точкой на пути, которая находится ближе всего к центру транспортного средства задней оси.
Вы можете получить кривизну пути из Curvatures выходного порта блока Path Smoother Spline. Можно также получить кривизны контуров маршрута из выхода маршрута контура структур Scenario Reader блока.
Чтобы включить этот порт, установите Vehicle model равным Dynamic bicycle model.
CurrYawRate - Текущая скорость рысканияТекущая скорость рыскания транспортного средства, в степенях в секунду, задается как действительный скаляр. Текущая скорость рыскания является скоростью изменения скорости вращения транспортного средства.
Чтобы включить этот порт, установите Vehicle model равным Dynamic bicycle model.
CurrSteer - Текущий угол поворота руляТекущий угол поворота транспортного средства, в степенях, задается как действительный скаляр. Это значение положительно в направлении против часовой стрелки.
Для получения дополнительной информации смотрите Системы координат в Automated Driving Toolbox.
Чтобы включить этот порт, установите Vehicle model равным Dynamic bicycle model.
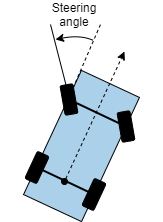
SteerCmd - Команда угла поворота руляКоманда угла поворота, в степенях, возвращается как действительный скаляр. Это значение положительно в направлении против часовой стрелки.
Для получения дополнительной информации смотрите Системы координат в Automated Driving Toolbox.
Вы можете переключаться между моделями велосипедов, когда изменяется окружение транспортного средства. Добавьте два блока Lateral Controller Stanley к подсистеме вариантов и задайте другую модель велосипеда для каждого блока. Для получения примера смотрите Руководство по латеральному управлению.
Чтобы вычислить команду угла поворота, контроллер минимизирует ошибку положения и ошибку угла текущего положения относительно положения ссылки. Направление движения транспортного средства определяет эти значения ошибки.
Когда транспортное средство находится в прямом движении (Direction параметр 1):
Значение position error является боковым расстоянием от центра передней оси до контрольной точки на пути.
Это angle error угол переднего колеса относительно ссылку пути.
Когда транспортное средство находится в обратном движении (Direction параметр -1):
Значение position error является боковым расстоянием от центра задней оси до контрольной точки на пути.
Это angle error угол заднего колеса относительно ссылку пути.
Для получения дополнительной информации о том, как контроллер минимизирует эти ошибки для кинематических и динамических моделей велосипедов, смотрите [1].
[1] Гофман, Габриэль М., Клэр Дж. Томлин, Майкл Монтемерло и Себастьян Трун. Autonomobile Automobile Trajectory Tracking for Off-Road Driving: Проектирование контроллера, Experimental Validation and Racing (неопр.) (недоступная ссылка). Американская контрольная конференция. 2007, стр 2296–2301. doi:10.1109/ACC.2007.4282788


