Сглаживайте путь к транспортному средству с помощью кубической сплайн интерполяции
Automated Driving Toolbox
Блок Path Smoother Spline генерирует гладкий путь автомобиля, состоящий из последовательности дискретизированных положений, путем подгонки входа положения ссылки пути к кубическому сплайну. Учитывая вход ссылки направления пути, блок также возвращает направления, которые соответствуют каждому положению.
Используйте этот блок для преобразования C1- непрерывный путь к C2- непрерывный путь. C1- непрерывные пути включают пути Дубинса или Ридса-Шеппа, которые возвращаются планировщиками путей. Для получения дополнительной информации об этих типах путей см. C1-Continuous и C2-Continuous пути.
Можно использовать возвращенные положения и направления с контроллером транспортного средства, таким как блок Lateral Controller Stanley.
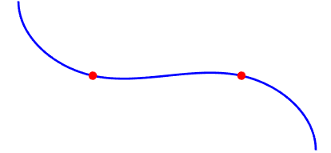
Путь есть C1- непрерывно, если его производная существует и непрерывна. Пути, которые являются только C1- непрерывные имеют разрывы в своей кривизне. Для примера путь, составленный из сегментов контура Дубинса или Ридса-Овцы, имеет разрывы кривизны в точках, где соединяются сегменты. Эти разрывы приводят к изменениям в направлении, которые недостаточно плавны для вождения с пассажирами.
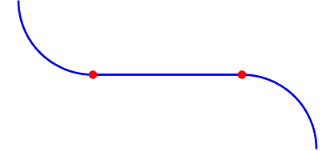
Путь также является C2- непрерывно, если его вторая производная существует и непрерывна. C2- непрерывные пути имеют непрерывную кривизну и являются достаточно гладкими для вождения с пассажирами.
Алгоритм сглаживания пути интерполирует параметрический кубический сплайн, который проходит через все входные опорные точки положения. Параметром сплайна является совокупная длина хорды в этих точках. [1]
Направление тангенса сглаженного выходного пути приблизительно совпадает с углом ориентации транспортного средства в начальном и целевом положениях.
[1] Floater, Michael S. «On the Deviation of a Parametric Cubic Spline Interpolant from Its Data Polygon». Автоматизированный геометрический проект. Том 25, № 3, 2008, стр. 148-156.
[2] Лепетич, Марко, Грегор Кланкар, Игорь Скрянц, Драго Матко, и Бостьян Потокник. «Оптимальное по времени планирование пути с учетом пределов ускорения». Робототехника и автономные системы. Том 45, номера 3-4, 2003, стр. 199-210.

