Фильтр дифференциатора конечной импульсной характеристики прямой формой
The dsp.Differentiator Система object™ применяет полнополосный дифференцирующий фильтр к входному сигналу, чтобы дифференцировать все его частотные составляющие. Этот объект использует конечную импульсную характеристику equiripple создания фильтра, чтобы спроектировать дифференцирующий фильтр. Идеальная частотная характеристика дифференциатора для . Вы можете проектировать фильтр с минимальным порядком с заданным порядком. Этот объект поддерживает операции с фиксированной точкой.
Чтобы фильтровать каждый канал вашего входа:
Создайте dsp.Differentiator Объекту и установите его свойства.
Вызывайте объект с аргументами, как будто это функция.
Дополнительные сведения о работе системных объектов см. в разделе «Что такое системные объекты?».
DF = dsp.DifferentiatorDF, который независимо фильтрует каждый канал входа с течением времени, используя данные проектные спецификации.
DF = dsp.Differentiator(Name,Value)
Чтобы использовать функцию объекта, задайте системный объект в качестве первого входного параметра. Например, чтобы освободить системные ресурсы системного объекта с именем obj, используйте следующий синтаксис:
release(obj)
Примечание.Этот пример выполняется только в R2016b или более поздней версии. Если вы используете более ранний релиз, замените каждый вызов функции на эквивалентный step синтаксис. Например, myObject (x) становится шагом (myObject, x).
Оцените групповую задержку КИХ-фильтра линейной фазы, используя dsp.TransferFunctionEstimator объект, за которым следуют dsp.PhaseExtractor и dsp.Differentiator объекты. Групповая задержка линейного фазового КИХ-фильтра задается,  где
где - информация о фазе фильтра
- информация о фазе фильтра - вектором частоты, а N - порядком фильтра.
- вектором частоты, а N - порядком фильтра.
Настройка объектов
Создайте линейную фазу конечной импульсной характеристики lowpass фильтра. Установите порядок в 200, частоту полосы пропускания в 255 Гц, пульсацию полосы пропускания в 0,1 дБ и ослабление полосы остановки в 80 дБ. Задайте частоту дискретизации 512 Гц.
Fs = 512; LPF = dsp.LowpassFilter('SampleRate',Fs,'PassbandFrequency',255,... 'DesignForMinimumOrder',false,'FilterOrder',200);
Чтобы оценить передаточную функцию lowpass, создайте оценщик передаточной функции. Задайте окно, которое будет Hann. Установите длину БПФ равную 1024, а количество спектральных средних значений - 200.
TFE = dsp.TransferFunctionEstimator('FrequencyRange','twosided',... 'SpectralAverages',200,'FFTLengthSource','Property',... 'FFTLength',1024);
Чтобы извлечь неотвернутую фазу из частотной характеристики фильтра, создайте экстрактор фазы.
PE = dsp.PhaseExtractor;
Чтобы дифференцировать фазу,  создайте дифференцирующий фильтр. Это значение используется при вычислении задержки группы.
создайте дифференцирующий фильтр. Это значение используется при вычислении задержки группы.
DF = dsp.Differentiator;
Чтобы сглаживать вход, создайте фильтр конечной импульсной характеристики пропускной способности переменной.
Gain1 = 512/pi; Gain2 = -1; VBFilter = dsp.VariableBandwidthFIRFilter('CutoffFrequency',10,... 'SampleRate',Fs);
Чтобы просмотреть групповую задержку фильтра, создайте объект графика массива.
AP = dsp.ArrayPlot('PlotType','Line','YLimits',[-500 400],... 'YLabel','Amplitude','XLabel','Number of samples');
Запуск алгоритма
The for-loop - это цикл потоковой передачи, который оценивает групповую задержку фильтра. В цикле алгоритм фильтрует входной сигнал, оценивает передаточную функцию фильтра и дифференцирует фазу фильтра, чтобы вычислить задержку группы.
Niter = 1000; % Number of iterations for k = 1:Niter x = randn(512,1); % Input signal = white Gaussian noise y = LPF(x); % Filter noise with Lowpass FIR filter H = TFE(x,y); % Compute transfer function estimate Phase = PE(H); % Extract the Unwrapped phase phaseaftergain1 = Gain1*Phase; DiffOut = DF(phaseaftergain1); % Differentiate the phase phaseaftergain2 = Gain2 * DiffOut; VBFOut = VBFilter(phaseaftergain2); % Smooth the group delay AP(VBFOut); % Display the group delay end

Как видим, групповая задержка lowpass составляет 100.
Создайте FM-волну на 100-Гц сигнале несущей, дискретизированной на 1,5 кГц.
Fc = 1e2; % Carrier Fs = 1.5e3; % Sample rate sinewave = dsp.SineWave('Frequency',10,... 'SamplesPerFrame',1e3,... 'SampleRate',Fs);
Преобразуйте FM сигнал в AM сигнал.
ts = timescope(2,... 'TimeSpanSource','Property',... 'TimeSpan',0.3,... 'BufferLength',10*Fs,... 'SampleRate',Fs,... 'ShowGrid',true,... 'YLimits',[-1.5 1.5],... 'LayoutDimensions',[2 1]); df = dsp.Differentiator; tic while toc<2.2 x = step(sinewave); fm_y = modulate(x,Fc,Fs,'fm'); am_y = step(df,fm_y); step(ts,fm_y,am_y); end release(df); release(ts);

Дифференциатор вычисляет производную сигнала. Частотная характеристика идеального дифференцирующего фильтра задается как , заданный в течение интервала Найквиста .
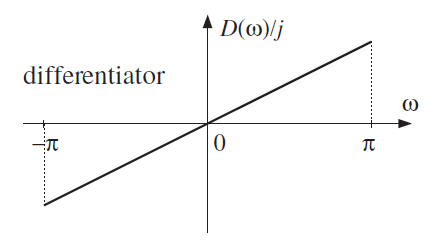
Частотная характеристика антисимметрична и линейно пропорциональна частоте.
dsp.Differentiator объект действует как дифференцирующий фильтр. Этот объект конденсирует двухэтапный процесс в один. Для проекта минимального порядка объект использует обобщенный алгоритм Ремеза конечной импульсной характеристики создания фильтра. Для заданного проекта порядка объект использует оптимальный алгоритм equiripple конечной импульсной характеристики создания фильтра Паркса-Макклеллана. Фильтр разработан как линейная фазовая конечная импульсная характеристика фильтр типа IV со структурой Direct.
Идеальный дифференциатор имеет антисимметричную импульсную характеристику, заданную как . Следовательно . Дифференциатор должен иметь нулевую характеристику на нулевой частоте.
Линейно-фазовая конечная импульсная характеристика дифференцирующий фильтр
Импульсная характеристика антисимметричного КИХ-фильтра линейной фазы задается как , где M - длина фильтра. Поскольку фильтр является антисимметричным, можно использовать этот тип конечной импульсной характеристики фильтра для разработки дифференциаторов линейной конечной импульсной характеристики.
Рассмотрим проектирование линейно-фазовых конечных импульсных характеристик дифференциаторов на основе критерия Чебышева приближения.
Если M нечетно, то реальная частотная характеристика конечной импульсной характеристики, Hr (в), имеет характеристики, что Hr (0) = 0 и Hr (в) = 0. Этот фильтр удовлетворяет условию нулевой характеристики на нулевой частоте. Однако это не полный диапазон, потому что Hr (,) = 0. Этот дифференциатор имеет линейную характеристику по ограниченной частотной области значений [0 2, fp], где fp - полоса пропускания дифференциатора. Абсолютная ошибка между желаемым ответом и приближением Чебышёва увеличений как ω увеличений от 0 до 2в fp.
Если M чётно, то реальная частотная характеристика конечной импульсной характеристики, Hr (и), имеет характеристики, что Hr (0) = 0 и Hr (и) ≠ 0. Этот фильтр удовлетворяет условию нулевой характеристики на нулевой частоте. Это полный диапазон, и этот проект приводит к значительно меньшей ошибке приближения, чем сопоставимые дифференциаторы нечетной длины. Следовательно, дифференциаторы четной длины (нечетный порядок) предпочтительны в практических системах.
[1] Orfanidis, Sophocles J. Введение в обработку сигналов. Upper Saddle River, NJ: Prentice Hall, 1996.
dsp.BiquadFilter | dsp.FIRFilter | dsp.HighpassFilter | dsp.VariableBandwidthFIRFilter | dsp.VariableBandwidthIIRFilter