Децимируйте сигнал с помощью каскадного интегрально-гребенчатого фильтра - оптимизированного для генерации HDL-кода
The dsp.HDLCICDecimation Система object™ децимирует входной сигнал при помощи каскадного децимирующего фильтра интегратора-гребня (CIC). CIC-фильтры являются классом КИХ-фильтров линейной фазы, состоящим из гребенчатой части и интеграторной части. Структура децимирующего фильтра CIC состоит из N секций каскадных интеграторов, коэффициента изменения скорости R, а затем N секций каскадных гребенчатых фильтров. Для получения дополнительной информации о CIC-фильтрах децимации смотрите Алгоритмы.
Системный объект поддерживает фиксированные и переменные скорости десятикратного уменьшения для скалярных входов и только фиксированную десятикратное уменьшение для векторных входов. Для обоих типов входов Системного объекта предоставляет скаляр выхода. Системный объект предоставляет архитектуру, подходящую для генерации HDL-кода и оборудования развертывания.
Системный объект поддерживает действительные и комплексные входы с фиксированной точкой.
Для фильтрации входных данных с помощью HDL-оптимизированного децимирующего фильтра CIC:
Создайте dsp.HDLCICDecimation Объекту и установите его свойства.
Вызывайте объект с аргументами, как будто это функция.
Дополнительные сведения о работе системных объектов см. в разделе «Что такое системные объекты?».
cicDecFilt = dsp.HDLCICDecimationcicDecFilt, со свойствами по умолчанию.
cicDecFilt = dsp.HDLCICDecimation(Name,Value)
[ фильтрует входные данные с помощью заданного коэффициента десятикратного уменьшения переменной, dataOut,validOut] = cicDecFilt(dataIn,validIn,decimFactor)decimFactor. The VariableDownsample свойство должно быть установлено в true.
[ фильтрует входные данные при dataOut,validOut] = cicDecFilt(dataIn,validIn,decimFactor,reset)reset является false и очищает внутренние состояния фильтра, когда reset является true. Системный объект ожидает reset аргумент только в том случае, если для свойства ResetIn задано значение true. The VariableDownsample для свойства задано значение true.
Чтобы использовать функцию объекта, задайте системный объект в качестве первого входного параметра. Например, чтобы освободить системные ресурсы системного объекта с именем obj, используйте следующий синтаксис:
release(obj)
The dsp.HDLCICDecimation Системный объект имеет структуру CIC-фильтра, показанную на этом рисунке. Структура состоит из N секций каскадных интеграторов, коэффициента изменения скорости R и N секций каскадных гребенчатых фильтров [1].

Проекты могут поместить модуль задержку в интеграторной части CIC-фильтра в путь feedforward или обратной связи. Эти два строений дают идентичную частотную характеристику фильтра. Однако числовые выходы этих двух строений различаются из-за задержек путей. Этот Системный объект помещает модуль задержку в feedforward путь интегратора.
В этом разделе описывается, как системный объект определяет тип выходных данных. Например, рассмотрите фильтр с DecimationFactor, DifferentialDelay, и NumSections значения 8, 1 и 3, соответственно, с шириной входом 16 битов.
Выход размера слова вычисляется как: ,
где:
B IN - длина входного слова.
B OUT - это длина выходного слова.
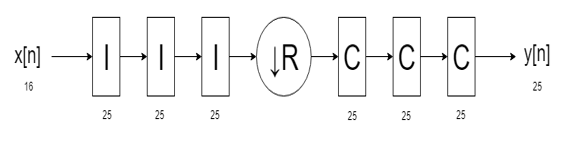
Когда вы устанавливаете OutputDataType свойство к 'Full precision'Системный объект возвращает данные с длиной слова 25 битов путем добавления девяти битов усиления к длине входного слова.
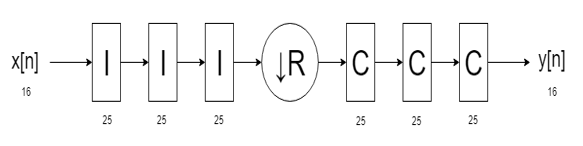
Когда вы устанавливаете OutputDataType свойство к 'Same word length as input'объект выходов данные с размером слова 16, которая является такой же длиной, как и входом размера слова. Внутренний интегратор и ступени гребня используют тип данных полной точности с 25 битами.
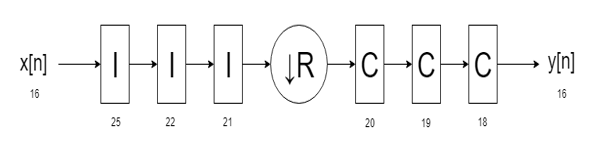
Когда вы устанавливаете OutputDataType свойство к 'Minimum section word lengths' и OutputWordLength свойство к 16, Системные объекты возвратов данные с размером слова 16 бит. В этом случае объект изменяет ширину битов на каждом этапе, основываясь на алгоритме Pruning.
Если на OutputWordLength значение свойства меньше, чем количество битов, запрошенных на выходе, сокращаются наименее значимые биты (LSB) на более ранних стадиях. Алгоритм Hogenauer предоставляет количество LSB, которые должны быть сброшены на каждом этапе. Этот алгоритм минимизирует потерю информации в выход данных [1].
В этом разделе показаны задержки Системного объекта для входного сигнала скаляра, когда Системный объект работает с фиксированными и переменными скоростями десятикратного уменьшения, и для входного сигнала вектора, когда Системный объект работает с фиксированной частотой десятикратного уменьшения.
Этот рисунок показывает выход системного объекта для строения по умолчанию, то есть с фиксированной частотой десятикратного уменьшения и DecimationFactor, DifferentialDelay, и NumSections значений 2, 1 и 2 соответственно. Этот Системный объект возвращает действительные выходы данные в каждом втором цикле на основе фиксированного значения DecimationFactor 2. Задержка Системного объекта составляет 5 тактов, рассчитанная как 3 + N.

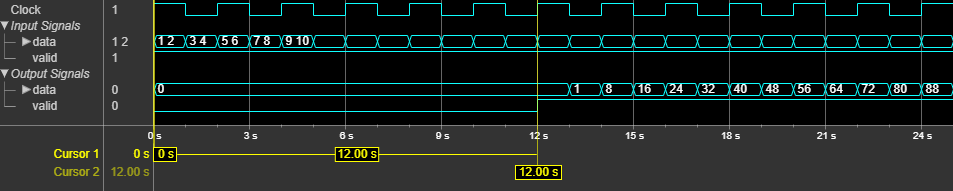
Этот рисунок показывает выход системного объекта с фиксированной частотой десятикратного уменьшения, DecimationFactor, DifferentialDelay, и NumSections значений 8, 1 и 3, соответственно и GainCorrection установлено на true. Этот Системный объект возвращает действительные данные выходы в каждом восьмом цикле на основе фиксированного значения DecimationFactor 8. Задержка объекта составляет 15 тактов и вычисляется как 3 + N + 9.

Этот рисунок показывает выход системного объекта для переменной decimFactor значения 2, 4 и 8 вместе с M и N значениями 1 и 3. The GainCorrection для свойства задано значение false. Системный объект возвращает действительные выходные данные во втором, четвертом и восьмом циклах, соответствующих decimFactor значения 2, 4 и 8, соответственно. Системный объект принимает decimFactor значение аргумента изменяется только при входе validIn является 1 (true). Задержка Системного объекта составляет 7 тактов, рассчитанная как 4 + N.

Задержка Системного объекта для входного сигнала вектора вычисляется с помощью этой формулы: floor((vecLen – 1) * (N / vecLen)) + 1 + N + 9 * GainCorrection + (2 + (vecLen + 1) * N), где vecLen - длина вектора, а N - количество сечений.
Этот рисунок показывает вывод объекта System для двухэлементного вектора-входного сигнала с настройкой по умолчанию, то есть с фиксированной частотой децимации и DecimationFactor, DifferentialDelay, и NumSections значений 2, 1 и 2 соответственно. Задержка блока составляет 12 тактов.
Этот рисунок показывает вывод объекта System для вектора с восемью элементами с фиксированной частотой децимации и R, M и N значениями 8, 1 и 3, соответственно и GainCorrection установлено на true. Задержка блока составляет 44 такта.

[1] Hogenauer, E. «Economical Class of Цифровые Фильтры for Decimation and Interpolation». Транзакции IEEE по акустике, речи и обработке сигналов 29, № 2 (апрель 1981): 155-62. https://doi.org/10.1109/TASSP.1981.1163535.
dsp.CICCompensationDecimator | dsp.CICCompensationInterpolator | dsp.CICDecimator | dsp.CICInterpolator