Имитационная модель БИНС
Sensor Fusion and Tracking Toolbox/Мультисенсорные модели позиционирования/датчика
Навигационный тулбокс/мультисенсорное позиционирование/модели датчика
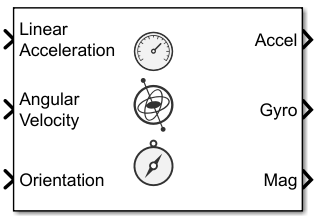
The IMU Simulink® блочные модели, получающие данные от инерциального измерительного блока (IMU), состоящей из датчиков акселерометра, гироскопа и магнитометра.
Модель акселерометра использует ориентацию и входы ускорения основная истина и imuSensor и accelparams свойства для моделирования показаний акселерометра.
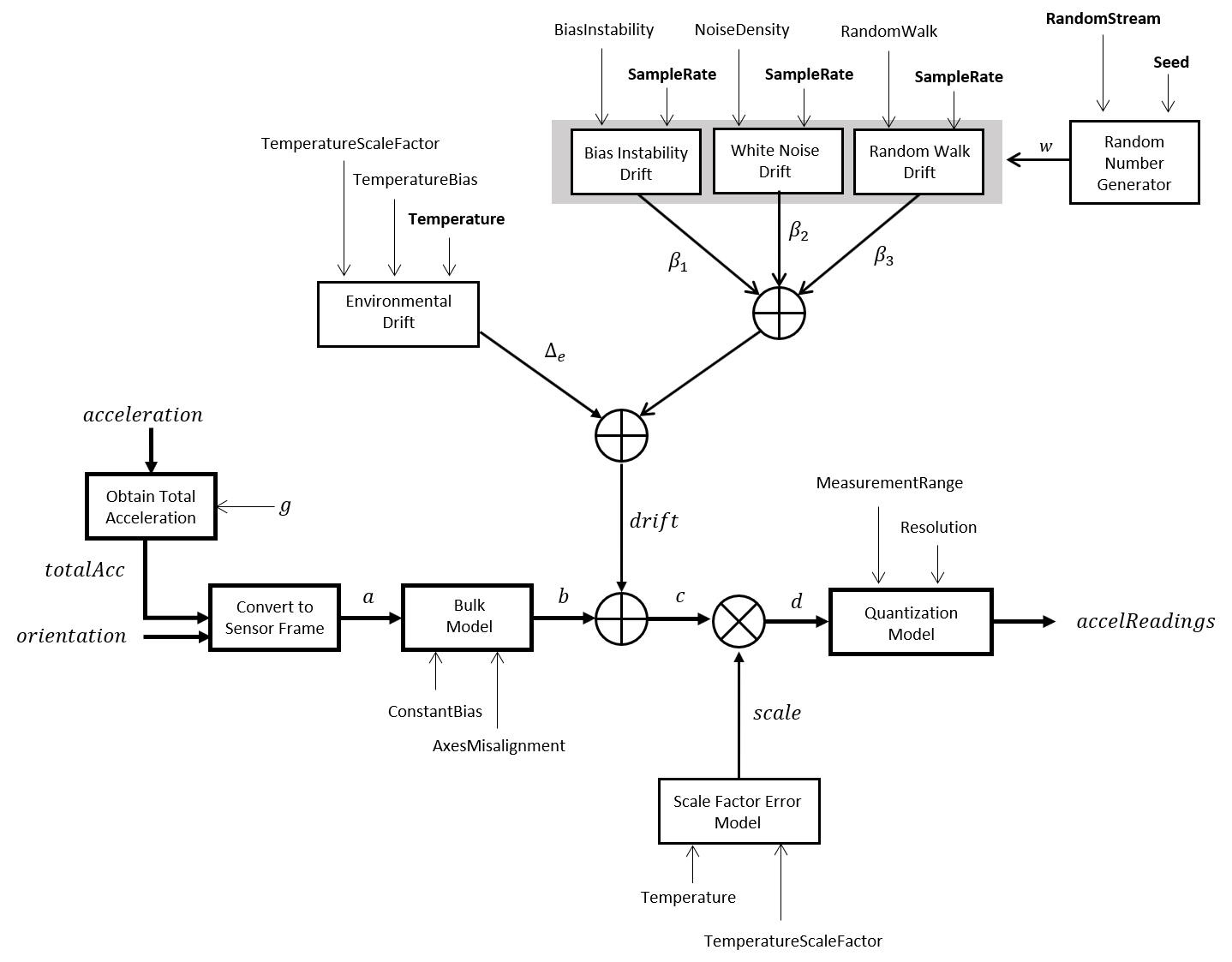
Чтобы получить полное ускорение (totalAcc), ускорение предварительно обрабатывается путем отрицания и добавления вектора постоянной силы тяжести (g = [0; 0; 9,8] м/с2) как:
Затем полное ускорение преобразуется из локальной навигационной системы координат в систему координат датчика с помощью:
Если ориентация введена в кватернионной форме, она преобразуется в матрицу вращения перед обработкой.
Ускорение основной истины в системе координат датчика, a, проходит через объемную модель, которая добавляет расхождения осей и смещения:
где ConstantBias является свойством accelparams, и α 1, α 2 и α 3 заданы первым, вторым и третьим элементами свойства AxesMisalignment accelparams.
Дрейф нестабильности смещения моделируется как смещенный белый шум и затем фильтруется:
где BiasInstability является свойством accelparams, и h 1 является фильтром, заданным свойством SampleRate:
Дрейф белого шума моделируется умножением элементов случайного потока белого шума на стандартное отклонение:
где SampleRate является imuSensor свойство, и NoiseDensity является accelparams свойство. Элементами w являются случайные числа, заданные настройками imuSensor случайный поток.
Случайный дрейф ходьбы моделируется элементами смещения случайного потока белого шума и затем фильтрацией:
где RandomWalk является свойством accelparams, SampleRate является свойством imuSensor, и h 2 является фильтром, заданным как:
Шум дрейфа среды моделируется путем умножения различия температур от стандарта с температурным смещением:
где Температура является свойством imuSensor, и TemperatureBias является свойством accelparams. Константа 25 соответствует стандартной температуре.
Ошибка коэффициента шкалы температуры моделируется как:
где Температура является свойством imuSensor, и TemperatureScaleFactor является свойством accelparams. Константа 25 соответствует стандартной температуре.
Квантование моделируется путем первого насыщения модели непрерывного сигнала:
а затем установка разрешения:
где MeasurementRange является свойством accelparams.
Модель гироскопа использует ориентацию основной истины, ускорение и скорость вращения входов и imuSensor и gyroparams свойства для моделирования показаний акселерометра.
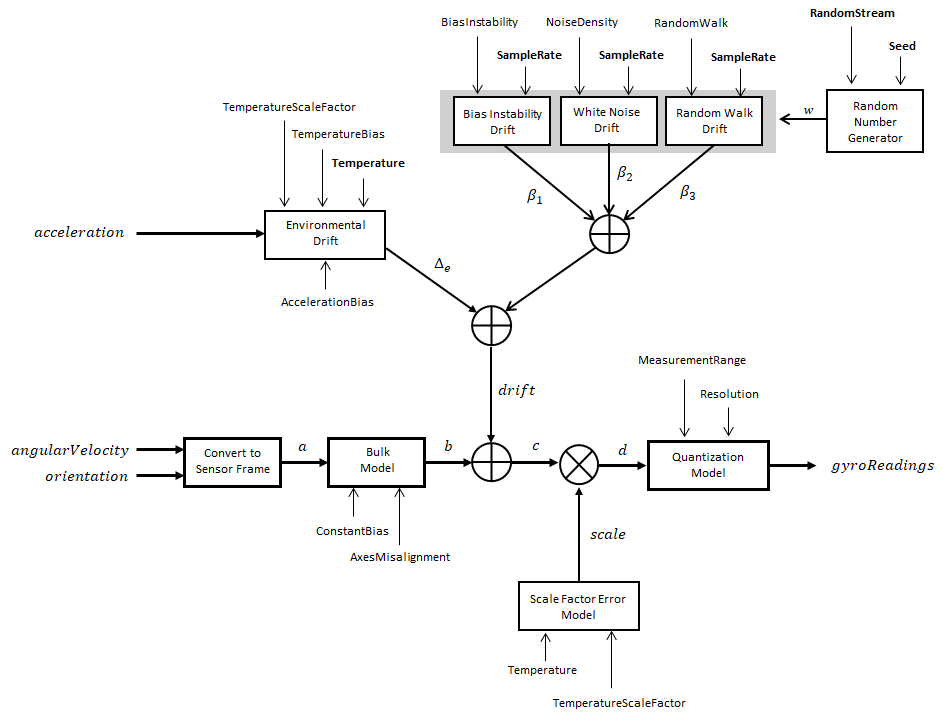
Основная истина скорости вращения преобразуется из локальной системы координат в систему координат датчика с помощью ориентации основной истины:
Если ориентация введена в кватернионной форме, она преобразуется в матрицу вращения перед обработкой.
Основная истина скорости вращения в системе координат датчика, a, проходит через объемную модель, которая добавляет расхождения осей и смещения:
где ConstantBias является свойством gyroparams, и α 1, α 2 и α 3 заданы первым, вторым и третьим элементами свойства AxesMisalignment gyroparams.
Дрейф нестабильности смещения моделируется как смещенный белый шум и затем фильтруется:
где BiasInstability является свойством gyroparams и h 1 является фильтром, заданным свойством SampleRate:
Дрейф белого шума моделируется умножением элементов случайного потока белого шума на стандартное отклонение:
где SampleRate является imuSensor свойство, и NoiseDensity является gyroparams свойство. Элементами w являются случайные числа, заданные настройками imuSensor случайный поток.
Случайный дрейф ходьбы моделируется элементами смещения случайного потока белого шума и затем фильтрацией:
где RandomWalk является свойством gyroparams, SampleRate является свойством imuSensor, и h 2 является фильтром, заданным как:
Шум дрейфа среды моделируется путем умножения различия температур от стандарта с температурным смещением:
где Температура является свойством imuSensor, и TemperatureBias является свойством gyroparams. Константа 25 соответствует стандартной температуре.
Ошибка коэффициента шкалы температуры моделируется как:
где Температура является свойством imuSensor, и TemperatureScaleFactor является свойством gyroparams. Константа 25 соответствует стандартной температуре.
Квантование моделируется путем первого насыщения модели непрерывного сигнала:
а затем установка разрешения:
где MeasurementRange является свойством gyroparams.
Модель магнитометра использует ориентацию и входы ускорения основная истина, и imuSensor и magparams свойства для моделирования показаний магнитометра.
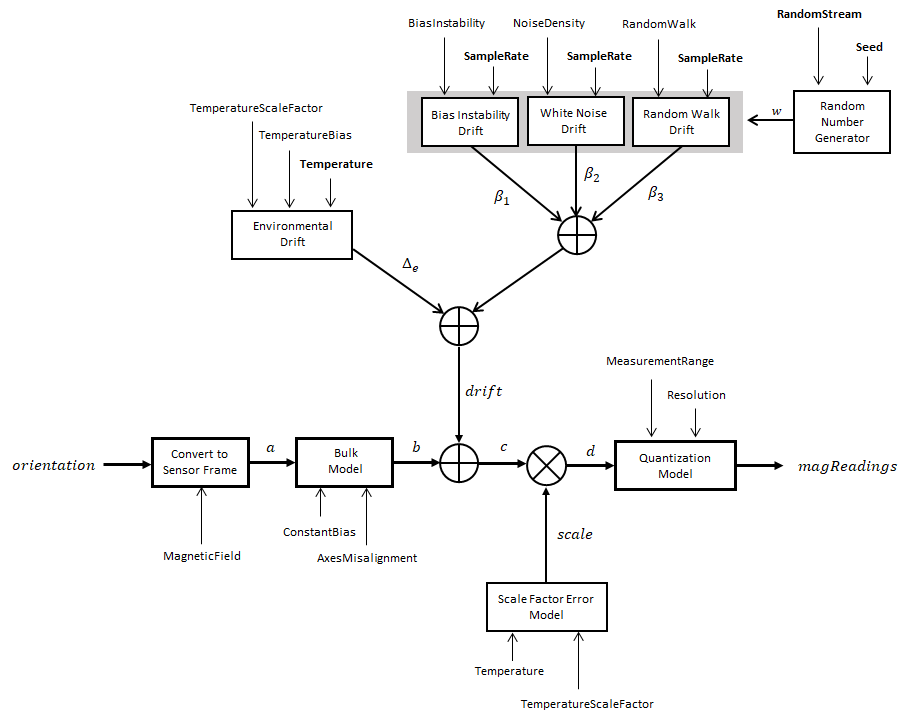
Ускорение основной истины преобразуется из локальной системы координат в систему координат датчика с помощью ориентации основной истины:
Если ориентация введена в кватернионной форме, она преобразуется в матрицу вращения перед обработкой.
Ускорение основной истины в системе координат датчика, a, проходит через объемную модель, которая добавляет расхождения осей и смещения:
где ConstantBias является свойством magparams, и α 1, α 2 и α 3 заданы первым, вторым и третьим элементами свойства AxesMisalignment magparams.
Дрейф нестабильности смещения моделируется как смещенный белый шум и затем фильтруется:
где BiasInstability является свойством magparams и h 1 является фильтром, заданным свойством SampleRate:
Дрейф белого шума моделируется умножением элементов случайного потока белого шума на стандартное отклонение:
где SampleRate является imuSensor свойство, и NoiseDensity является magparams свойство. Элементами w являются случайные числа, заданные настройками imuSensor случайный поток.
Случайный дрейф ходьбы моделируется элементами смещения случайного потока белого шума и затем фильтрацией:
где RandomWalk является свойством magparams, SampleRate является свойством imuSensor, и h 2 является фильтром, заданным как:
Шум дрейфа среды моделируется путем умножения различия температур от стандарта с температурным смещением:
где Температура является свойством imuSensor, и TemperatureBias является свойством magparams. Константа 25 соответствует стандартной температуре.
Ошибка коэффициента шкалы температуры моделируется как:
где Температура является свойством imuSensor, и TemperatureScaleFactor является свойством magparams. Константа 25 соответствует стандартной температуре.
Квантование моделируется путем первого насыщения модели непрерывного сигнала:
а затем установка разрешения:
где MeasurementRange является свойством magparams.

