Этот раздел посвящен калибровке смещения аналого-цифрового контроллера (ADC) и датчика положения.
В инверторе кондиционирование сигнала для датчика тока вводит напряжение смещения во входе АЦП для измерения как положительного, так и отрицательного тока. Это значение смещения отличается для каждого целевого компьютера, потому что это зависит от допусков компонентов в схеме измерения и кондиционирования сигнала. Рекомендуется, чтобы вы измерили смещение ADC датчика тока для целевого компьютера. Смещение ADC датчика тока представлено в отсчетах ADC, которые соответствуют нулевому значению тока.
Смотрите пример Запуск 3-Phase электродвигателей переменного тока в разомкнутом контуре управления и Калибровка смещения АЦП, чтобы вручную измерить значение смещения АЦП. В Motor Control Blockset™ примерах обновите измеренное значение в inverter.CtSensAOffset и inverter.CtSensBOffset переменные в скрипте инициализации модели. По умолчанию скрипт обновляет inverter.CtSensAOffset и inverter.CtSensBOffset переменные со значениями по умолчанию.
Примеры в Motor Control Blockset вычисляют смещение ADC датчика тока в подсистеме инициализации оборудования. В скрипте инициализации модели, когда вы задаете inverter.ADCOffsetCalibEnable = 1скрипт включает калибровку смещения датчика тока в целевом компьютере во время инициализации. В подсистеме инициализации оборудования каналы АЦП считывают вход ток несколько раз и усредняют их. Токовый контроллер использует это среднее значение смещения АЦП. В скрипте инициализации модели, когда вы задаете inverter.ADCOffsetCalibEnable = 0скрипт отключает калибровку смещения датчика тока и использует значения скрипта инициализации.
Примечание
Всегда измеряйте смещение ADC датчика тока, когда двигатель не вращается. Рекомендуется отключить электрические провода, соединенные с двигателем.
Контроллер требует расчета смещения датчика положения, чтобы определить точную обратную связь в реальном времени положения ротора и правильно реализовать алгоритм векторного управления (FOC). Рекомендуется использовать примеры калибровки смещения для вычисления смещения положения перед выполнением любого другого примера, который использует FOC.
Смещение датчика Холла - это угол между осью d ротора и положением, обнаруженным датчиком Холла. Можно использовать смещение, чтобы исправить и вычислить точное положение d оси ротора.
Смещение датчика квадратурного энкодера является углом между осью d ротора и положением индекса энкодера, обнаруженным квадратурным энкодером.
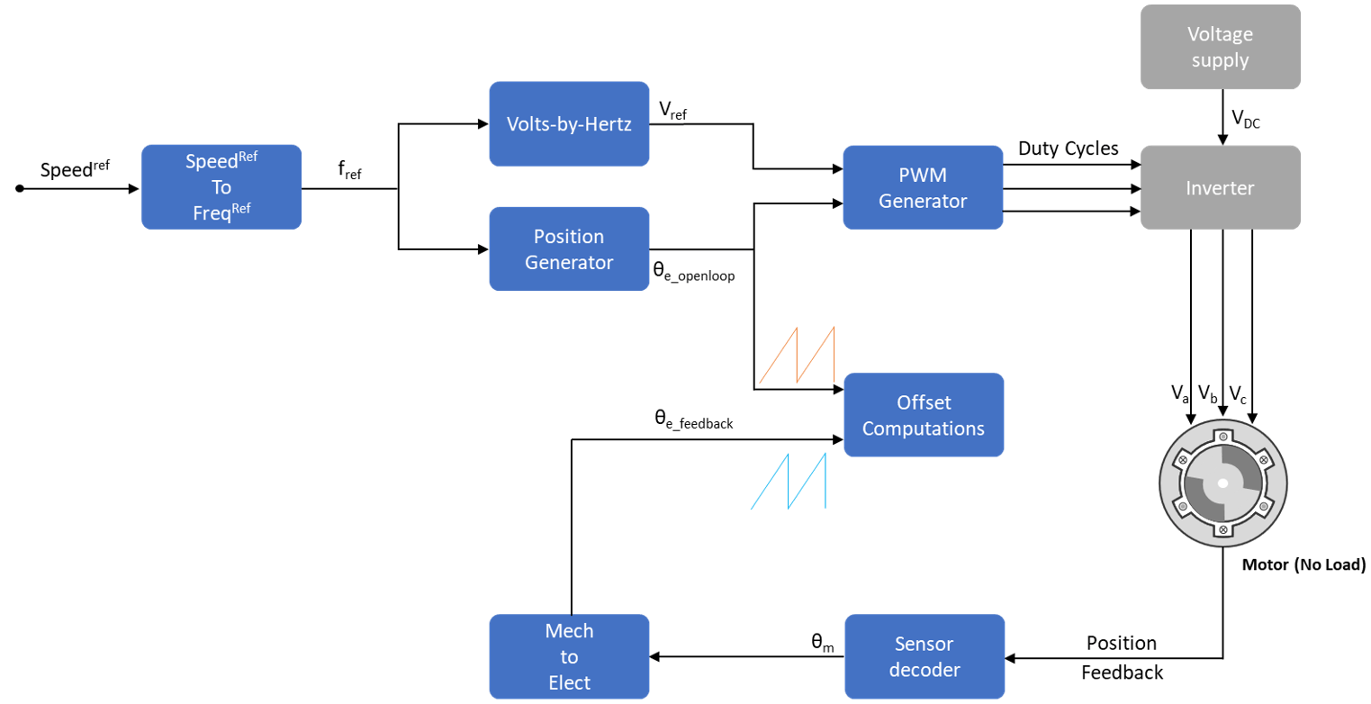
Motor Control Blockset предлагает примеры, такие как калибровка смещения квадратурного энкодера для PMSM Motor и калибровка смещения Холла для PMSM Motor, чтобы получить точное положение ротора для реализации алгоритма управления. Примеры расчета смещения используют уникальный алгоритм наряду с разомкнутым контуром, чтобы вычислить смещения положения датчиков положения (Hall или квадратурный энкодер). Разомкнутый контур (также известное как скалярное управление или В/Гц управление) является популярным методом управления двигателем, который может использоваться для запуска любого двигателя переменного тока. Это простой метод, который не нуждается в обратной связи от двигателя. Чтобы гарантировать постоянство магнитного потока статора, сохраните амплитуду напряжения питания пропорциональной ее частоте. Этот рисунок показывает обзор регулирования без разомкнутого контура. Дополнительные сведения см. в разделах Управление разомкнутой и замкнутой системами.
При помощи этого алгоритма примеры калибровки смещения обнаруживают смещение положения таким образом:
Проверьте, находится ли двигатель в условии отсутствия нагрузки.
Запустите и запустите двигатель в разомкнутый контур на очень низкой скорости (для примера, 60 об/мин). На низкой скорости d ротора -ось тесно выравнивается с вращающимся магнитным полем статора.
Измерьте положение обратной связи доступного датчика положения (Hall или квадратурный энкодер).
Сравните положение разомкнутого контура с положением обратной связи и проверьте, что последовательность фаз верна. При необходимости исправьте фазовую последовательность двигателя.
Вычислите смещение положения датчика Холла путем получения различия между положением разомкнутого контура и положением обратной связи.
Запустите двигатель в разомкнутом контуре в течение нескольких циклов и остановите двигатель. Убедитесь, что импульс индекса энкодера обнаружен по крайней мере один раз. Заблокируйте ротор в d оси. Смещение положения квадратурного энкодера идентично обратной связи о положении. Это выводит положение механического смещения квадратурного энкодера.
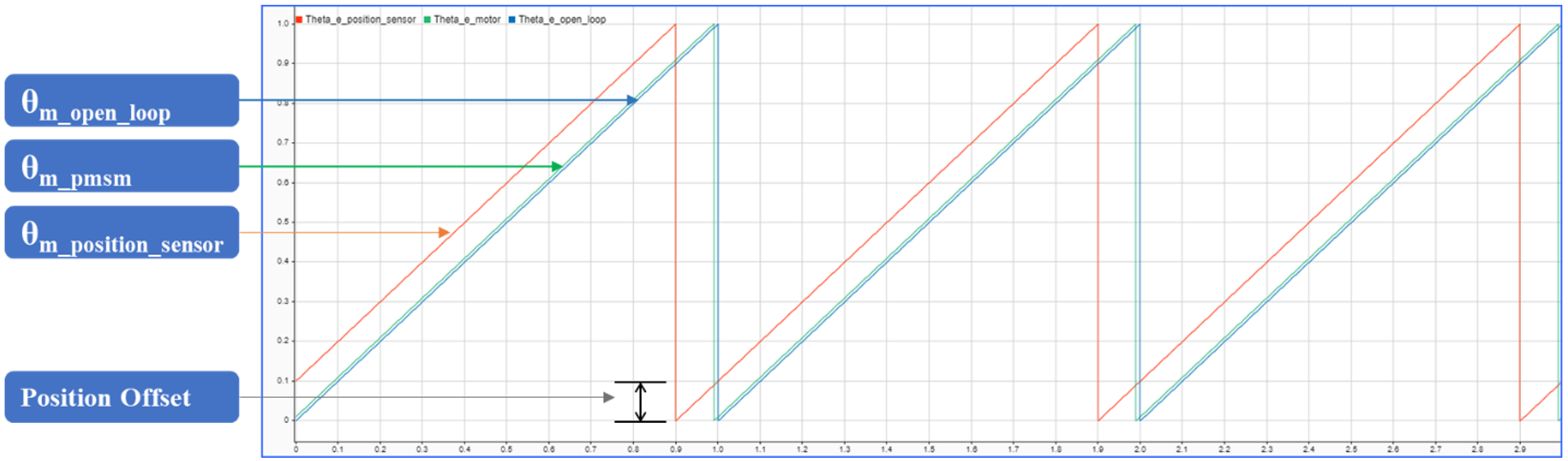
Этот рисунок показывает сравнение положения разомкнутого контура из алгоритма управления вместе с фактическим положением двигателя. Рисунок также показывает обратную связь с датчиком положения. Смещение положения, которое является различием между положением разомкнутого контура и положением обратной связи от датчика, вычисляется алгоритмом, предусмотренным в калибровочных моделях смещения.
Обновите измеренное смещение в pmsm.PositionOffset переменная в скрипте инициализации модели примеров.
Для оценки параметра обновите измеренное смещение Холла в поле Hall Offset mcb_param_est_host_read модель.
Примечание
Пример калибровки смещения Холла для PMSM Motor выводит смещение электрического положения. В то время как пример калибровки смещения квадратурного энкодера для PMSM Motor выводит механическое смещение положения.
Для шагов вычисления смещений смотрите следующие примеры:
Калибровка смещения квадратурного энкодера для двигателя PMSM
