Сгенерируйте последовательность переключений для шестиступенчатой коммутации бесщеточного двигателя постоянного тока (BLDC)
Motor Control Blockset/Controls/Control Reference
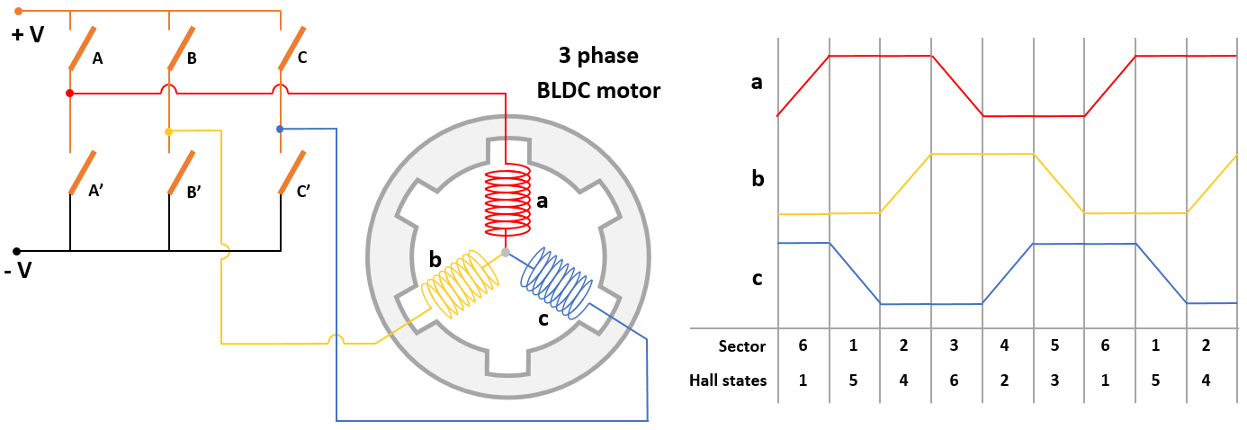
Блок Six Step Commutation использует режим проводимости 120 градусов, чтобы сгенерировать последовательность переключений, чтобы реализовать шестиступенчатую коммутацию (или трапециевидную коммутацию) на трехфазном двигателе BLDC. Можно использовать сигналы переключения для работы переключателей и управления токами статора, и, следовательно, контролировать скорость двигателя и направление вращения.
Блок принимает порядковый номер Холла или положение ротора (от датчика положения, такого как Холл или квадратурный датчик энкодера) и направление крутящего момента в качестве входов. Он использует последовательность Холла или вход положения, чтобы определить сектор, в котором присутствует ротор. Блок вычисляет последовательность переключений так, чтобы он включал соответствующие фазы, чтобы сохранить угол крутящего момента (угол между осью D ротора и магнитным полем статора) 90 степени (с отклонением 30 степеней).
Этот рисунок является примером, который показывает фазоры магнитного поля статора вместе с их последовательностью Холла по умолчанию.
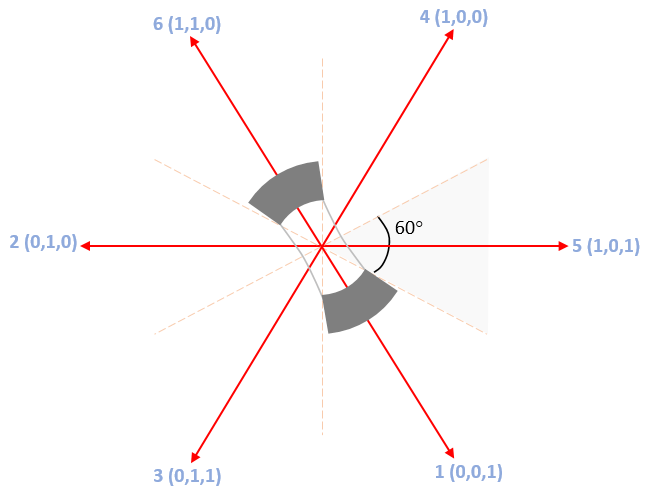
Блок использует логику коммутации, основанную на последовательности Холла, чтобы сгенерировать последовательности переключений.
| Холл Стейт (зал a, зал b, зал c) | Коммутационная последовательность (AA 'BB' CC ') | ||
|---|---|---|---|
| AA' | BB' | Копия | |
| 5 (101) | 00 | 10 | 01 |
| 4 (100) | 01 | 10 | 00 |
| 6 (110) | 01 | 00 | 10 |
| 2 (010) | 00 | 01 | 10 |
| 3 (011) | 10 | 01 | 00 |
| 1 (001) | 10 | 00 | 01 |
Этот рисунок показывает фазоры магнитного поля статора вместе с возможными секторами (определенными из положения входного ротора).
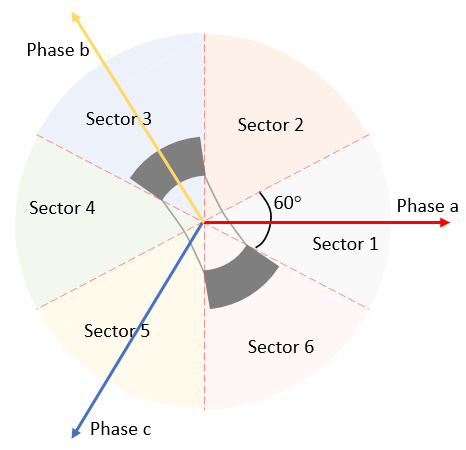
Блок использует логику коммутации, основанную на сигналах датчика положения, чтобы сгенерировать последовательности переключений.
| Положение (и) | Сектор | Коммутационная последовательность (AA 'BB' CC ') | ||
|---|---|---|---|---|
| AA' | BB' | Копия | ||
| (-30°, 30°] | 1 | 00 | 10 | 01 |
| (30°, 90°] | 2 | 01 | 10 | 00 |
| (90°, 150°] | 3 | 01 | 00 | 10 |
| (150°, 210°] | 4 | 00 | 01 | 10 |
| (210°, 270°] | 5 | 10 | 01 | 00 |
| (270°, 330°] | 6 | 10 | 00 | 01 |