Чтобы спроектировать алгоритм управления скорости:
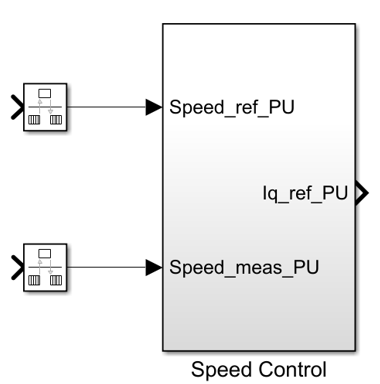
Создайте подсистему контроллера скорости. The Iq_ref текущий выход подсистемы контроллера скорости используется как вход в текущую подсистему контроллера, которую вы создали ранее.
Чтобы создать подсистему контроллера скорости, из Simulink® Library Browser, выберите Discrete PI Controller with anti-windup & reset блок из Motor Control Blockset/Controls/Controllers библиотека.
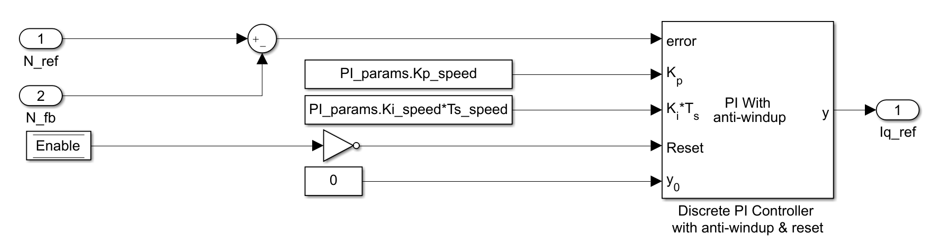
MATLAB® функциональные mcb.internal.SetControllerParameters (в скрипте инициализации модели) вычисляет коэффициент усиления ПИ-регулятора для d-осей и q-осей и контроллера скорости. Для получения дополнительной информации об оценке усиления параметров управления, см. «Оценка коэффициентов усиления из параметров двигателя». Смотрите файл скрипта инициализации модели mcb_pmsm_foc_qep_f28379d_data.m (используется в примере Векторное управление PMSM с использованием квадратурного энкодера) для времени дискретизации (Ts_speed) 500мкс. Используйте Enable Datastore Памяти блока, чтобы сбросить контроллер, но это необязательно.
Создайте подсистему для контроллера скорости и добавьте блок Rate Transition (из Simulink/Signal Attributes библиотека) на входы со шаг расчета как Ts_speed (время выполнения цикла управления скорости).
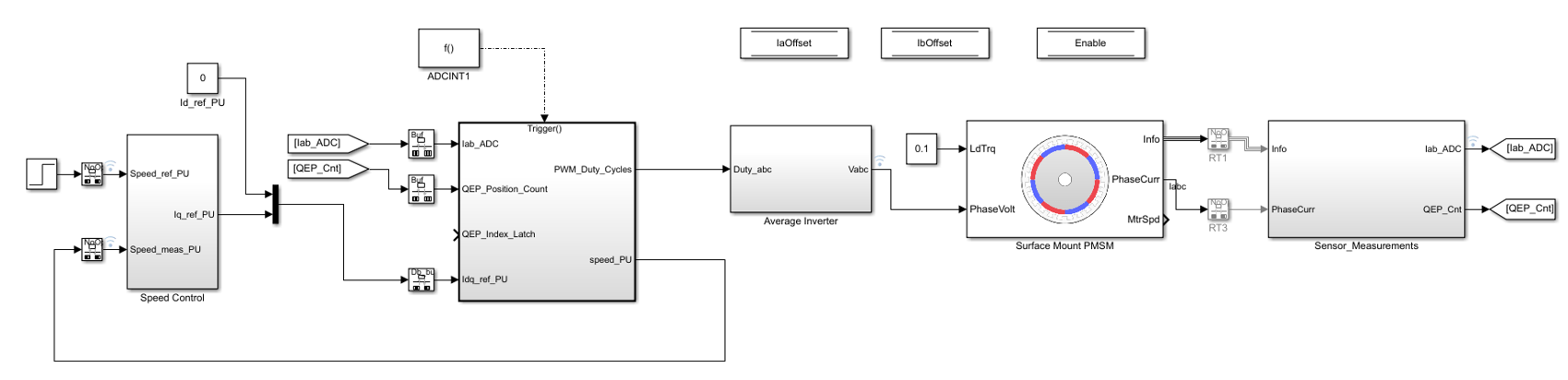
Интегрирование Подсистемы Контроллера Скорости с интегрированными Подсистемами Токового Контроллера и модели объекта управления. Подключите Iq_ref_PU выходной порт подсистемы контроллера скорости к входному порту подсистемы токового контроллера через блок Rate Transition, когда оба порта выполняются в различных скоростях дискретизации. Этот рисунок показывает пример настроек блока Rate Transition, соединенного с подсистемами контроллера скорости и токового контроллера.
![]()
Этот рисунок показывает интегрированные подсистемы контроллера скорости, токового контроллера и модели объекта управления.